") 特斯拉CEO馬斯克再批激光雷達(dá),純視覺方案才是自動(dòng)駕駛的未來
特斯拉CEO馬斯克再批激光雷達(dá),純視覺方案才是自動(dòng)駕駛的未來
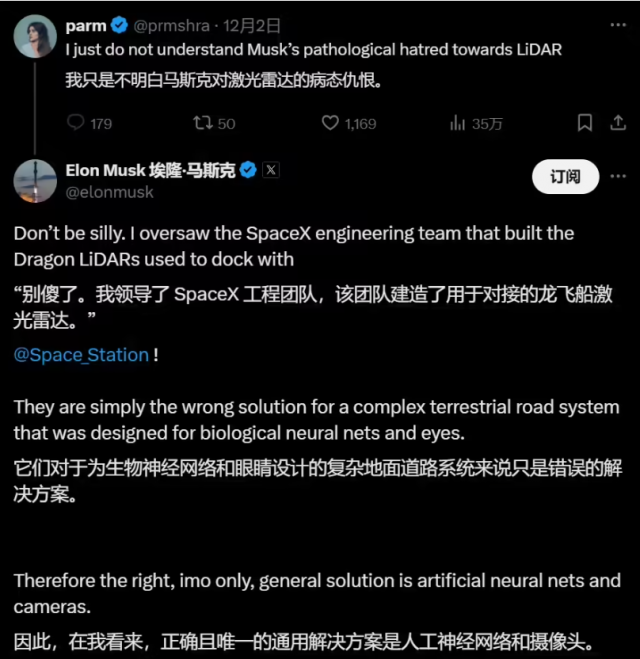
近日,特斯拉的首席執(zhí)行官埃隆·馬斯克再次公開批評激光雷達(dá)技術(shù),直言其為“錯(cuò)誤的解決方案”,并重申了其一貫的觀點(diǎn):在復(fù)雜的道路駕駛環(huán)境中,模擬生物神經(jīng)網(wǎng)絡(luò)和眼睛的視覺系統(tǒng)才是最為有效的方式。這一言論再次引發(fā)了業(yè)界對自動(dòng)駕駛技術(shù)路線的廣泛討論。
馬斯克在多個(gè)場合都曾表達(dá)過對激光雷達(dá)的批評。他認(rèn)為,激光雷達(dá)雖然能夠提供高精度的距離和障礙物信息,但其高昂的成本、復(fù)雜的系統(tǒng)架構(gòu)以及與視覺系統(tǒng)結(jié)合時(shí)可能產(chǎn)生的“感知不一致性”等問題,使得激光雷達(dá)并非自動(dòng)駕駛的最佳選擇。相反,特斯拉堅(jiān)持的純視覺方案,通過攝像頭實(shí)時(shí)采集路況信息,并借助視覺神經(jīng)網(wǎng)絡(luò)將圖像轉(zhuǎn)化為三維場景,再由自動(dòng)駕駛計(jì)算機(jī)進(jìn)行分析和決策,具有更高的成本效益和可靠性。
特斯拉的這一理念在其車型中得到了充分體現(xiàn)。該公司已決定在所有車型中取消毫米波雷達(dá),完全依賴攝像頭與人工神經(jīng)網(wǎng)絡(luò)來實(shí)現(xiàn)自動(dòng)駕駛功能。馬斯克認(rèn)為,這種純視覺方案不僅更為簡潔,而且在感知精度和可靠性上遠(yuǎn)超激光雷達(dá)與雷達(dá)、視覺結(jié)合的方案。他指出,當(dāng)雷達(dá)與視覺感知數(shù)據(jù)發(fā)生沖突時(shí),系統(tǒng)難以判斷應(yīng)該信任哪一方,這種不確定性是自動(dòng)駕駛系統(tǒng)無法接受的隱患。而純視覺方案則能夠避免這一問題,因?yàn)橐曈X系統(tǒng)能夠像人類駕駛員一樣,通過實(shí)時(shí)采集和分析路況信息,做出準(zhǔn)確的駕駛決策。
然而,并非所有人都認(rèn)同馬斯克的觀點(diǎn)。國內(nèi)多數(shù)汽車制造商和供應(yīng)商采用的是融合感知方案,這種方案結(jié)合了激光雷達(dá)、攝像頭、毫米波雷達(dá)等多種傳感器,旨在增強(qiáng)系統(tǒng)的冗余性和感知能力。一些專家認(rèn)為,激光雷達(dá)具有超遠(yuǎn)距離探測和三維立體空間掃描的能力,能夠?yàn)樽詣?dòng)駕駛系統(tǒng)提供更豐富的環(huán)境信息,從而提高系統(tǒng)的安全性和可靠性。
盡管如此,馬斯克依然堅(jiān)持認(rèn)為,純視覺方案才是自動(dòng)駕駛的未來。他指出,隨著技術(shù)的不斷進(jìn)步和成本的降低,視覺系統(tǒng)將在自動(dòng)駕駛領(lǐng)域發(fā)揮越來越重要的作用。特斯拉將繼續(xù)致力于優(yōu)化和完善其純視覺方案,為消費(fèi)者提供更加安全、便捷、高效的自動(dòng)駕駛體驗(yàn)。
此次馬斯克的言論再次引發(fā)了業(yè)界對自動(dòng)駕駛技術(shù)路線的關(guān)注和討論。未來,隨著技術(shù)的不斷發(fā)展和市場的不斷變化,自動(dòng)駕駛技術(shù)將呈現(xiàn)出更加多元化和競爭化的格局。無論是純視覺方案還是融合感知方案,都將為自動(dòng)駕駛技術(shù)的發(fā)展和進(jìn)步貢獻(xiàn)自己的力量。
審核編輯 黃宇
-
特斯拉
+關(guān)注
關(guān)注
66文章
6320瀏覽量
126662 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
4000瀏覽量
190115 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13891瀏覽量
166676
發(fā)布評論請先 登錄
相關(guān)推薦
馬斯克展望人形機(jī)器人與自動(dòng)駕駛未來
一則消息引爆激光雷達(dá)行業(yè)!特斯拉竟然在自研激光雷達(dá)?
馬斯克重申:純視覺是自動(dòng)駕駛的未來
馬斯克:特斯拉計(jì)劃每年至少生產(chǎn)200萬輛Cybercab
激光雷達(dá)與純視覺方案,哪個(gè)才是自動(dòng)駕駛最優(yōu)選?
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
?小鵬新車或放棄激光雷達(dá) 馬斯克發(fā)評論
狂踩激光雷達(dá)的馬斯克,如今竟成Luminar的榜一大哥?

馬斯克稱特斯拉的FSD系統(tǒng)不需要激光雷達(dá)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論