 科技綻放-EtherCAT轉Profinet網關智能連接項目
科技綻放-EtherCAT轉Profinet網關智能連接項目
一、項目名稱
備選名稱及含義:開疆智能EtherCAT轉Profinet網關智能連接項目:直接體現了從Profinet到EtherCAT的連接核心內容,智能連接突出了該項目的技術特點。工業互聯方案強調了該項目在工業領域實現不同協議設備互聯的目標,方案一詞表明其系統性。
二、設備選擇
假設選定了凱福科技的某型號總線步進驅動器。選擇理由:該驅動器具有高精度、高速度、穩定性好等性能參數,符合項目對運動控制的要求。其規格適中,能夠滿足項目中的負載需求。同時,該設備與開疆智能網關模塊兼容性良好,可確保整個系統的穩定運行。
三、總線步進驅動器參數配置
以下是一些可能的參數項:
步數/轉:根據實際需求設置電機每轉所需的步數。
最大速度:限制電機的最高運行速度。
加速度:決定電機從靜止加速到設定速度的快慢。
電流限制:防止電機過流損壞。
細分設置:調整電機的細分精度。
四、運行指令執行
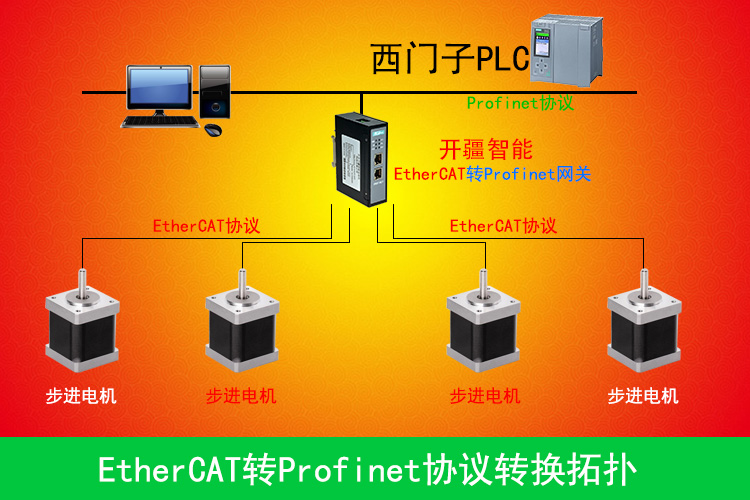
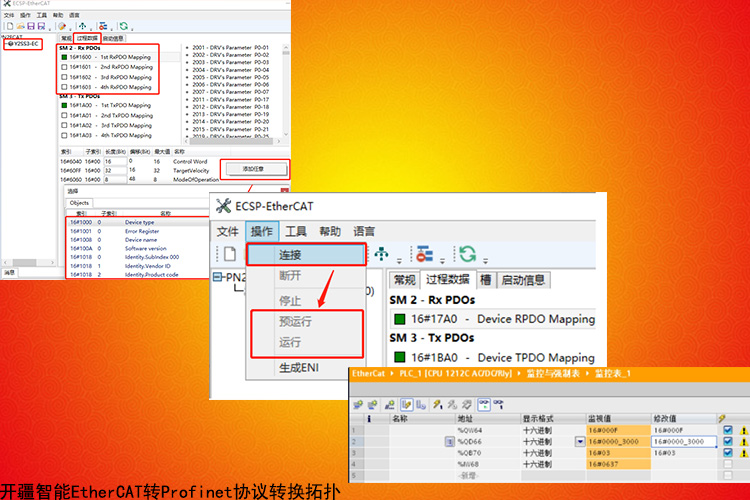
執行前檢查:檢查網絡連接是否正常,確保開疆智能EtherCAT轉Profinet網關模塊與西門子PLC、凱福科技總線步進驅動器之間的物理連接穩定。確認所有設備的電源供應正常。在博圖軟件中檢查PLC的配置是否正確,包括IP地址、設備名稱等信息與網關和驅動器的設置一致。執行運行指令:在博圖軟件中啟動PLC運行模式,此時PLC將通過PROFINET協議與開疆智能EtherCAT轉Profinet網關模塊進行通信。網關模塊根據配置將PROFINET協議轉換為EtherCAT協議,并將控制信號傳輸給凱福科技總線步進驅動器。驅動器接收到控制信號后,按照預設參數運行電機。
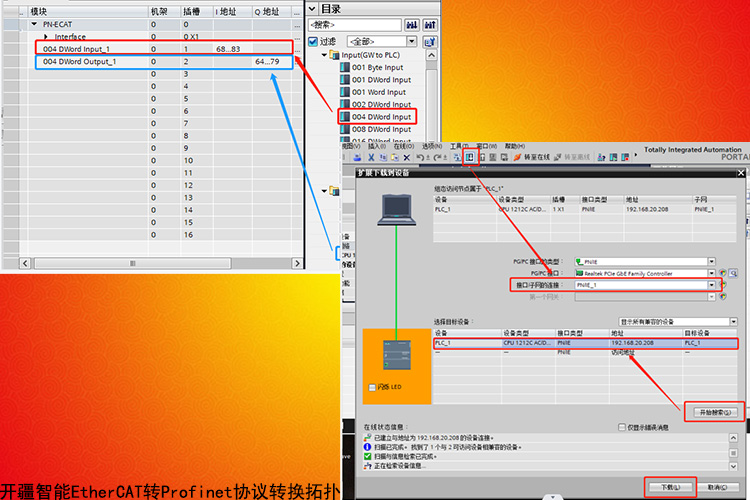
五、IQ地址讀寫操作
詳細步驟:在博圖軟件中,找到對應的輸入輸出地址(IQ地址)區域。對于讀取操作,使用PLC的讀取指令,指定要讀取的IQ地址。軟件將通過PROFINET網絡發送讀取請求到開疆智能EtherCAT轉Profinet網關模塊。網關模塊接收到請求后,將其轉換為EtherCAT協議的讀取請求,并發送給凱福科技總線步進驅動器。驅動器將相應的數據返回給網關模塊,網關再轉換為PROFINET協議的數據并傳輸回PLC。對于寫入操作,類似地,使用PLC的寫入指令,指定要寫入的IQ地址和數據值。軟件將數據通過PROFINET網絡發送給網關模塊。網關模塊轉換為EtherCAT協議的寫入請求并發送給驅動器,完成數據寫入操作。
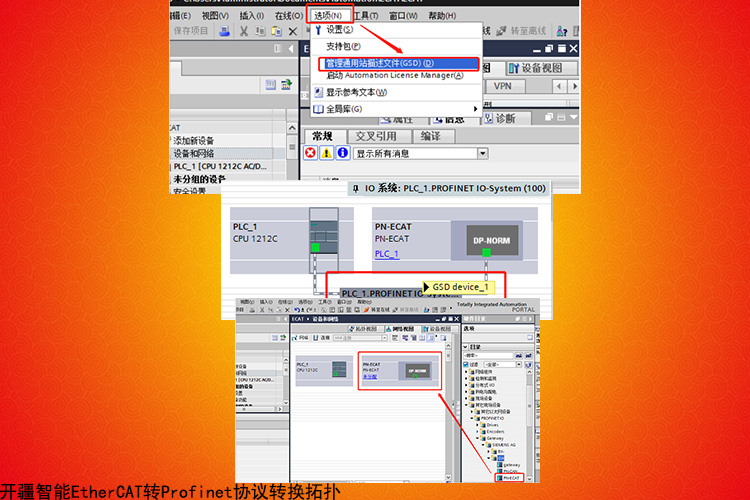
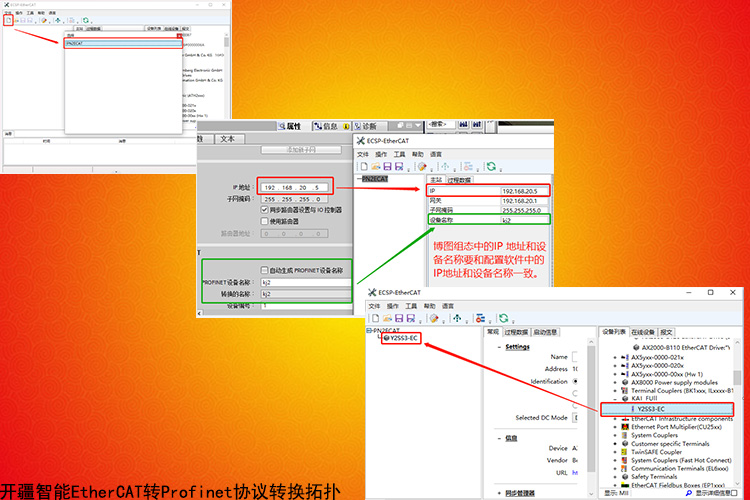
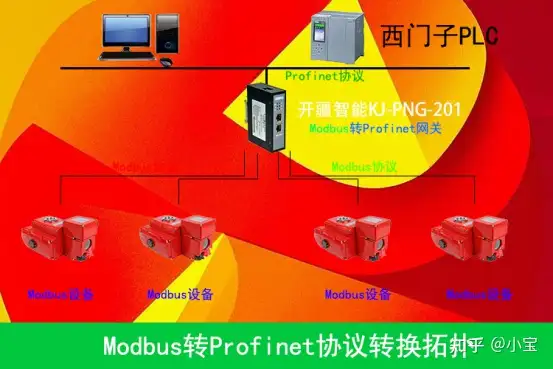
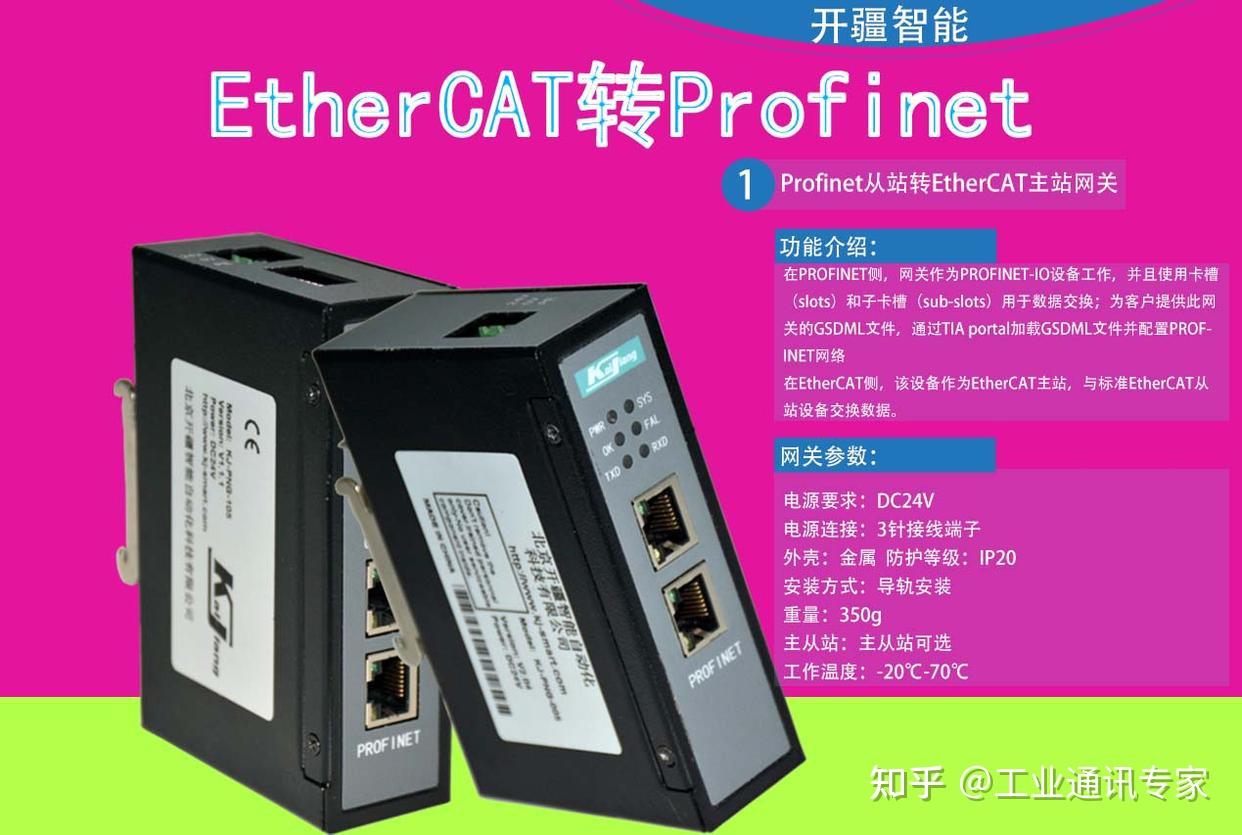
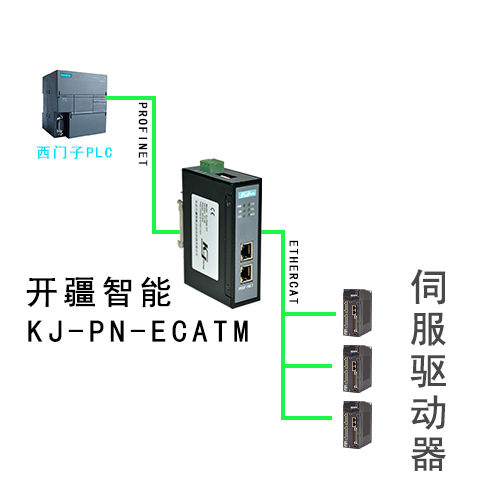
六、開疆智能EtherCAT轉Profinet網關模塊作為連接橋梁的作用及實現步驟數據映射過程:啟動開疆智能網關模塊的配置軟件。在軟件中,分別設置PROFINET網絡和EtherCAT網絡的參數,包括IP地址、設備名稱等。進入數據映射界面,將西門子PLC中需要傳輸給凱福科技總線步進驅動器的數據地址與網關模塊中對應的EtherCAT數據地址進行關聯。例如,將PLC的輸出地址與驅動器的控制指令地址進行映射。同樣,將驅動器返回的數據地址與PLC的輸入地址進行映射,以便PLC能夠讀取驅動器的狀態信息。S7-1200PLC通過PROFINET協議對伺服器進行控制的步驟:在博圖軟件中進行S7-1200PLC的編程,設置控制邏輯和數據處理。PLC將控制數據發送到開疆智能網關模塊,通過PROFINET網絡進行通信。網關模塊接收到PROFINET數據后,根據配置進行協議轉換,將其轉換為EtherCAT協議的數據格式。網關模塊將轉換后的控制數據發送給凱福科技總線步進驅動器,實現對伺服器的控制。驅動器執行控制指令,并將狀態信息返回給網關模塊。網關模塊將狀態信息轉換為PROFINET協議的數據格式,并傳輸回PLC,以便PLC進行監控和處理。快速控制的實現操作:通過優化數據映射的配置,減少不必要的數據傳輸,提高數據處理效率。在PLC編程中,采用高效的控制算法和數據處理方式,減少控制指令的執行時間。確保網絡連接的穩定性和低延遲,以實現快速的響應時間。
-
網關
+關注
關注
9文章
4469瀏覽量
51106 -
Profinet
+關注
關注
6文章
1183瀏覽量
23409 -
ethercat
+關注
關注
18文章
690瀏覽量
38701
發布評論請先 登錄
相關推薦
開疆智能profinet轉Modbus網關連接施耐德智能電動執行機構配置案例
開疆智能Profinet轉EtherCAT網關連接EA7000耦合器配置案例

EtherCAT轉Profinet:輕松連接西門子PLC與凱福驅動器!

Profinet轉EtherCAT網關模塊配置詳解
智能通訊領先者EtherCAT轉Profinet網關實現PLC驅動器的連接

Profinet轉CanOpen網關連接與CanOpen協議磁軌道實現高效連接

profinet轉ethercat連接伺服在工業現場的配置案例

PLC與伺服完美融合:Profinet轉EtherCAT網關配置詳解
通過Profinet轉EtherCAT網關將伺服驅動與Profinet通訊

通過Profinet轉EtherCAT網關將伺服驅動與Profinet通訊
通過Profinet轉EtherCAT網關將伺服驅動與Profinet通訊
通過Profinet轉EtherCAT網關將伺服驅動與Profinet通訊





 工商網監
工商網監
評論