 征程6 (Journey6,以下簡稱J6)芯片及開放平臺介紹
征程6 (Journey6,以下簡稱J6)芯片及開放平臺介紹
征程6介紹
與以往征程系列前幾代產品不同的是,征程6(我們業內稱為J6,“鉤6”)并不是一款芯片,而是根據算力大小,分成了J6B/J6L/J6E/J6M/J6H/J6P 6款!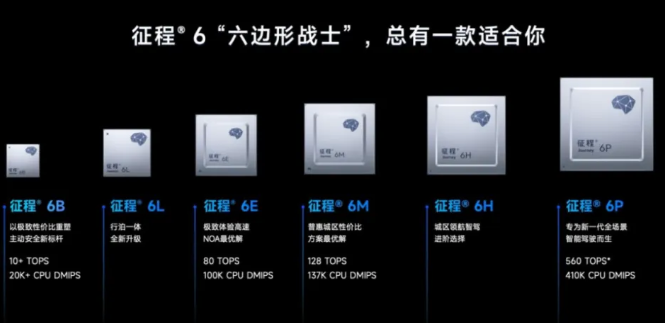
1 J6P芯片參數
- CPU:18核心的ARM Cortex-A78AE,算力是410K DMIPS
- BPU:如上文介紹,采用了納什架構第四代BPU,560TOPS算力(注意上圖左下角的一行小字:560TOPS算力是等效1/2稀疏網絡下的算力,必須嚴謹!)
- 算法支持:對Transformer算法的支持效率在業內領先,同時支持大規模交互式博弈等前沿算法,表明其在處理復雜AI任務上的優越性能。
- 功能安全:通過ISO 26262 ASIL-D功能安全流程認證,主動安全AEB ASIL-B產品級功能安全認證。
2 四芯合一的芯片架構
J6芯片所實現的“四芯合一”是指將以下四種關鍵處理單元集成在同一顆系統級芯片SoC上:
- CPU(Central Processing Unit):負責通用計算任務,處理非特定的計算工作負載,是芯片的控制中心,執行操作系統的指令和應用程序的邏輯控制。
- BPU(Brain Processing Unit):地平線自主研發的神經網絡處理單元,專門針對人工智能算法和深度學習任務進行了優化,如圖像識別、自然語言處理等,是實現智能駕駛核心算法的關鍵。
- GPU(Graphics Processing Unit):圖形處理器,除了傳統意義上的圖形渲染,現代GPU也廣泛用于并行計算,特別是在機器視覺、環境感知等需要大量并行處理的場景中。
- MCU(Microcontroller Unit):微控制器單元,常用于實現嵌入式控制功能,具有功能全、體積小、集成度高等特點。在J6中,MCU被集成用以處理功能安全相關的任務,確保系統的可靠性。
這種高集成度的設計不僅提升了系統性能,還顯著提高了性價比,降低了部署難度,使得單顆征程6芯片就能夠支持包括感知、規劃決策、控制、座艙感知等在內的全棧計算任務,適用于多種智能駕駛應用場景。
這種多合一實際上就是SIP(System in Package),SIP技術是一種先進的半導體封裝技術,它允許將多種功能芯片、元器件(如處理器、存儲器、傳感器、RF組件等)以及被動元件(如電阻、電容)集成在一個封裝內部,形成一個具有完整或部分系統功能的封裝模塊。與傳統的單一封裝只包含一個主要芯片(如SoC)不同,SIP技術通過并排排列、堆疊或采用3D封裝等方法,將多個獨立的芯片和組件緊密集成,從而實現了更高的集成度和更小的封裝尺寸。
征程6系列不是人們之前猜測的3款芯片,而是6款,足以覆蓋智能駕駛的各個場景和價位。發布會上重點介紹了征程6B、6E、6M和6P,筆者認為B應該是Base,L是Light,E是Efficiency,M是Medium,H是High,P是Performance或Premium。地平線沒有公開征程6L和6H的參數,預估6H的AI算力是256-300 TOPS,CPU算力是250-300K DMIPS。6L的AI算力是30-40TOPS,CPU算力是40-50K DMIPS。
征程6系列與5系列相比,升級最明顯的是CPU算力。征程5的CPU是8核心Cortex-A55,算力大致是25-30K DMIPS,這次除了最低的征程6B,其余CPU算力都大幅度提高。
征程6系列的另一個升級是BPU架構,所謂BPU就是地平線對AI加速器的另一種稱呼,B代表Brain,可以稱為類腦處理器,第一代BPU,地平線致敬數學家伯努利,伯努利分布是最簡單的離散型概率分布模型。第二代BPU,地平線致敬英國數學家貝葉斯,他推導出貝葉斯定理,貝葉斯定理是一個由結果倒推原因的概率算法,當年默默無聞,在人工智能的今天大放異彩。
征程6的第三代BPU架構則致敬博弈論創始人納什,稱之為納什架構。約翰·納什,生于1928年6月13日,著名經濟學家、博弈論創始人、《美麗心靈》男主角原型,并且還是前麻省理工學院助教,后任普林斯頓大學數學系教授,主要研究博弈論、微分幾何學和偏微分方程。由于他與另外兩位數學家(經濟學家,約翰·C·海薩尼和萊因哈德·澤爾騰)在非合作博弈的均衡分析理論方面做出了開創性的貢獻,對博弈論和經濟學產生了重大影響,而獲得1994年諾貝爾經濟學獎。
博弈論主要針對智能車與智能車,智能車與非智能車之間決策交互產生的影響,目前大部分智能駕駛都是基于單車的,未考慮其他車輛對智能車決策的影響,這使得智能車有時候看起來不十分靈活,比如對向車主動讓道讓智能車先走,但智能車無法理解對向車的意圖,還是傻傻地等對向車先走。也就是智能駕駛的策略,大多都有強化學習的影子,強化學習(Reinforcement Learning,RL)旨在通過與環境(可以是虛擬的也可以是真實的)的交互來使智能體(我們的「模型」)學習。RL 一開始是根據 Markov 過程提出的,我們讓智能體處于不確定的固定環境中,并試圖通過獎勵/懲罰機制來學習到一個最優策略。在單智能體的情況下,這種方法被證明是收斂的。但是,如果是將多個智能體放置在同一環境中(多智能體強化學習,MARL),情況就復雜多了。
假設我們正在試著用智能車來改善城市的交通情況,這時每輛車的決策都會影響其他車的決策與表現,比如智能車與智能車之間很可能會發生沖突,因為可能對于兩輛智能車而言,沿著某條路線行駛都是最方便的(獲得最多的獎勵)。博弈論有個RL算法,它使用深度神經網絡進行函數逼近,迭代計算子游戲的收益矩陣(Gt)。這個子游戲就是上文提到的 stage games。在每個時間 t 處(每個 stage game),都會計算出符合 NE 的回應(σ),并得到最優策略(π),然后添加新的策略來擴展 Gt 為 Gt + 1,繼續重復上述過程。這是最高明的智能駕駛決策算法。
征程6全系列的AI加速都是納什架構
征程6B主打極致性價比,CPU可能是6核心的Cortex-A55,制造工藝可能是14或28納米,征程6B的國際意向客戶是博世和電裝,國內意向客戶是四維圖新、福瑞泰克和Minieye。主要對手可能是Mobileye的EyeQ5M/H和EyeQ6L。

征程6系列主打產品是E/M。
征程6系列將于2024年內開啟首個前裝量產車型交付,并預計于2025年實現超10款車型量產交付。面向中階智駕市場,地平線推出普惠城區性價比方案最優解——征程6M,以及極致體驗高速NOA最優解——征程6E,并提供符合AEC-Q104車規標準的SiP模組和Matrix 6域控參考設計,以超高集成度實現更低的功耗和更優的系統成本。發布會上,地平線官宣與多家Tier1、軟硬件合作伙伴達成征程6E/M的合作,并公布到2024年第二季度將有超過50家生態伙伴推出基于征程6E/M的準量產級產品。
大家最關注的還是征程6系列的旗艦征程6P。
征程6P的AI算力是560TOPS,地平線謹慎地做了標注,560TOPS是在1/2稀疏網絡下的等效算力,地平線未提及精度,應該還是INT8位。這個算力實際遠超4片Orin合并的算力,再強調一次,以目前車載領域用的最頂級車載以太網交換機帶寬不超過1.25GB/s,典型的PCIe 4.0交換機,帶寬不超過32GB/s,即便是價格遠超Orin 的PCIe 6.0交換機,帶寬也不超過120GB/s。想要像服務器行業那樣是用4個H100就讓算力增加4倍,帶寬至少要做到900GB/s,而這根本做不到,用最頂級的車載以太網交換機連接4個Orin,算力頂多是1.2倍單個Orin算力,也就是300TOPS。這也是英偉達要花十幾億美元開發NVLINK的原因,也是NVLINK被美國管制嚴禁出口的原因。
CPU是18核心的ARM Cortex-A78AE,算力是410K DMIPS,英偉達Orin-X是12核心,內核也是ARM Cortex-A78AE,算力是227K DMIPS,因為Orin的GPU發熱量比較大,所以其CPU的頻率較低,而地平線的GPU算力只有200GFLOPS,發熱量很低,所以CPU頻率可以高點,算力幾乎是英偉達的兩倍,華為的昇騰610的CPU則是16核心,算力是200K DMIPS
征程6P里面添加了一個微型GPU,算力很低,只有200GFLOPS,主要是為了將智能駕駛領域的圖像輸出到儀表或中控屏上。
為了降低成本,更好管理供應鏈,也為了減少軟件復雜度, 征程6P內部添加了一個達到ASIL-D級的MCU島,算力是10K DMIPS ,目前 大家都是使用單獨的安全MCU來控制車輛底盤,通常是英飛凌的TC397,TC397價格比較高,且價格波動大,供應狀況不穩定,最高算力是4K DMIPS,典型算力是2.7K DMIPS 。地平線沒有公布詳細信息,應該是 和高通SA8650/SA8255/SA8775那樣的4核心ARM Cortex-R52內核,運行頻率估計是800-1000MHz 。
存儲帶寬方面,升級到了LPDDR5,帶寬達205GB/s,與英偉達Orin相同。前視感知支持1800萬像素,圖像帶寬5.3Gpixel/s。
- 內部采用TB/s級高性能總線,訪存延時低至130納秒。
- 為應對新一代大模型Transformer較多的矢量運算,特別添加了VPU,即矢量浮點運算加速單元。
- 地平線征程P6的晶體管數量高達370億,英偉達Orin只有170億,Xavier只有90億。
與征程6系列一同發布的還有 全場景智能駕駛解決方案SuperDrive ,它聚焦擬人化體驗突破,打造好用的智駕系統2.0。憑借動態、靜態、OCC(Occupancy占用網絡)三網合一的端到端感知架構,數據驅動的交互式博弈算法,SuperDrive在任何道路環境下都能兼顧場景通過率、通行效率和行為擬人,在擁堵匯流、路口交互-動態Driveline、禮讓騎行人、擁堵換道、城市環島通行等城區復雜場景下,均能夠為用戶帶來優雅不慫、從容篤定的智能駕駛體驗。
SuperDrive復雜場景體驗突破
動態、靜態、Occupancy三網合一的感知端到端架構是精準還原客觀物理世界的有效手段。在此架構下遮擋準召率提升70%,動態代碼行數降低90%,網絡負載降低50%,有效解決當前行業感知架構時延高、規則多、負載重的問題。數據驅動的交互博弈可帶來更擬人的最優解,使得SuperDrive像老司機一樣靈活處理復雜交通流,在擁堵場景下變道成功率提升50%,路口通過率提升67%。
審核編輯 黃宇
-
芯片
+關注
關注
455文章
50802瀏覽量
423502
發布評論請先 登錄
相關推薦
征程5 (Journey 5,以下簡稱J5)芯片及開放平臺介紹

ETAS支持地平線征程6 AUTOSAR版本發布
東軟睿馳NeuSAR成功適配地平線征程6系列
MGMF552L1H6M-MINAS A6N系列 介紹 松下

MGMF552L1C6M-MINAS A6N系列 介紹 松下
MGMF292L1H6M-MINAS A6N系列 介紹 松下
MGMF292L1D6-MINAS A6N系列 介紹 松下
STM32G031J6M6的BOOT0接的是串口轉485,使用485接口可以下載程序嗎?
MGMF242L1G6-MINAS A6N系列 介紹 松下
STM32F429ZIY6和STM32F429ZIY6J的區別J具體代表什么意思呢?
MGMF182L1H6M-MINAS A6N系列 介紹 松下





 工商網監
工商網監
評論