 120萬億機器人市場帶火國產傳感器,哪些有望率先打破壟斷?(全面分析)
120萬億機器人市場帶火國產傳感器,哪些有望率先打破壟斷?(全面分析)
近期,華為加速布局人形機器人產業,市場普遍看好人形機器人產業的發展,在中國股市,多只人形機器人概念股票紛紛上漲,從市場到資本,目前中國智能機器人產業已開始爆發,根據麥肯錫預測,長期來看,全球人形機器人市場空間可達120萬億級別,是一個嶄新且空間龐大的藍海市場。據艾瑞咨詢預測,2021年到2025年國內智能機器人市場規模的年平均復合增長率將達到40%,2025年中國智能機器人市場規模接近千億。
多家證券公司研報認為,傳感器是機器人重要組成部分,價值量或僅次于關節模組。傳感器市場高增長率表明機器人對于傳感器有強烈需求——在近期暴漲的股票中,既有多只來自傳感器產業鏈的股票。
此外,國產機器人企業更傾向于打造可控的全產業鏈,將對國產傳感器、減速器等上下游有旺盛的需求,這是國產高端傳感器的時代機遇。
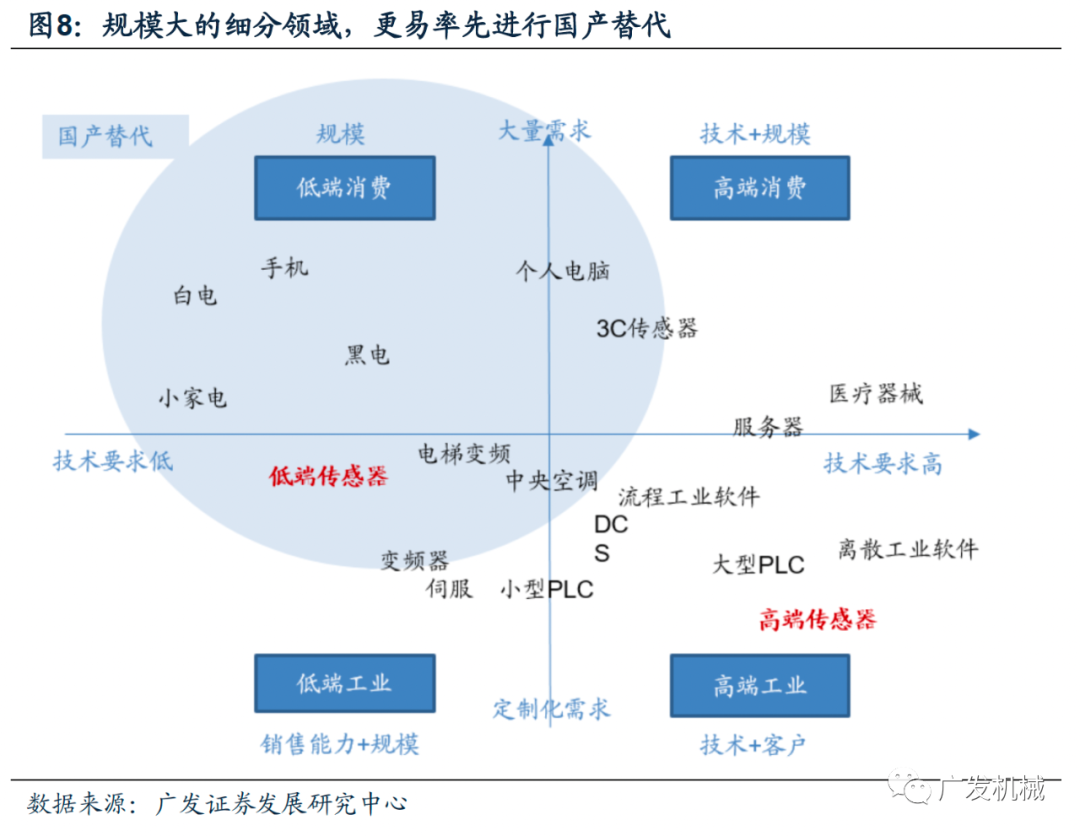
分析稱,我國傳感器領域中,規模效應更強的領域,或率先實現國產替代。中國消費類電子的傳感器,由于市場的拉動,近十年已經有了很大的進步。在工業領域,部分低端領域已有成功案例,但高端產品目前卡脖子情況仍較為嚴重,國產替代之路任重道遠。未來人形機器人如果能夠達到消費品級別的體量,可能推動細分板塊的國產替代加速。
在人形機器人的快速發展中,或將會帶動新型柔性傳感器加速落地。詳細分析見下文。
把握時代機遇!布局人形機器人相關傳感器領域,有望擴大高端傳感器國產率
傳感器下游應用領域廣泛,產業鏈條較長、產品種類眾多,各類產品國產替代進程各不相同。規模效應更強的領域,更容易率先進行國產替代。
人形機器人,傳感器的新機會。人形機器人需要用到多種傳感器,包括力矩傳感器,拉壓力傳感器、編碼器、溫度傳感器、六力傳感器和慣導傳感器等。其中,慣導傳感器(IMU)是實現人形機器人姿態控制的核心,六力傳感器是力控、擺動穩定控制的核心,可精準測量隨機變化的力。隨著人形機器人產業的擴張,有望帶動傳感器行業進一步擴容。
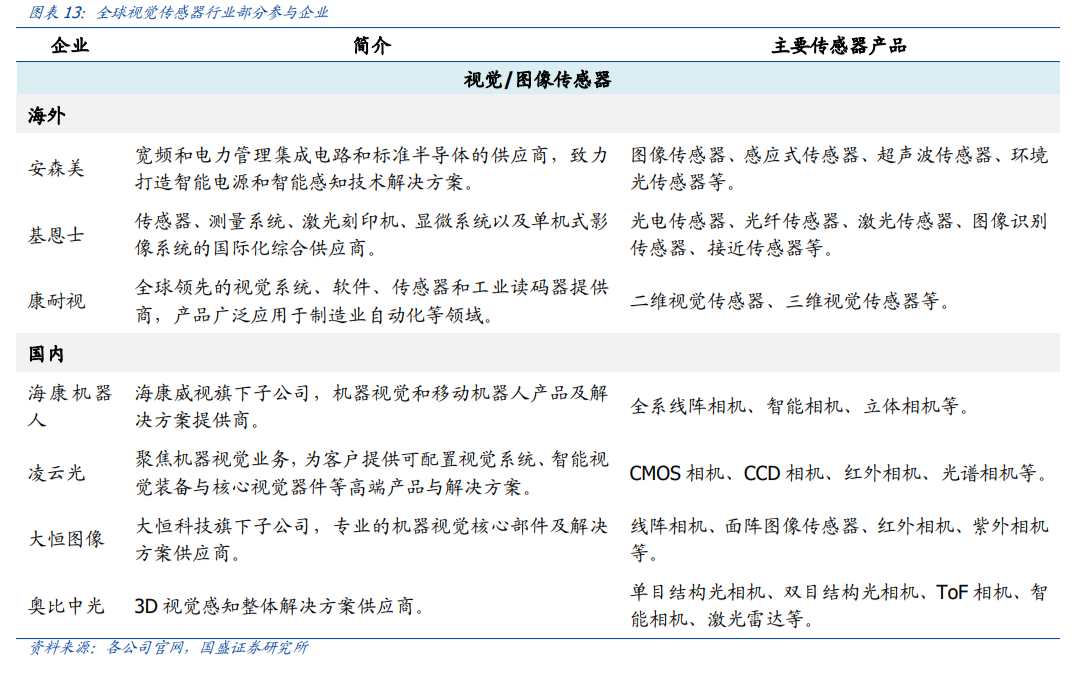
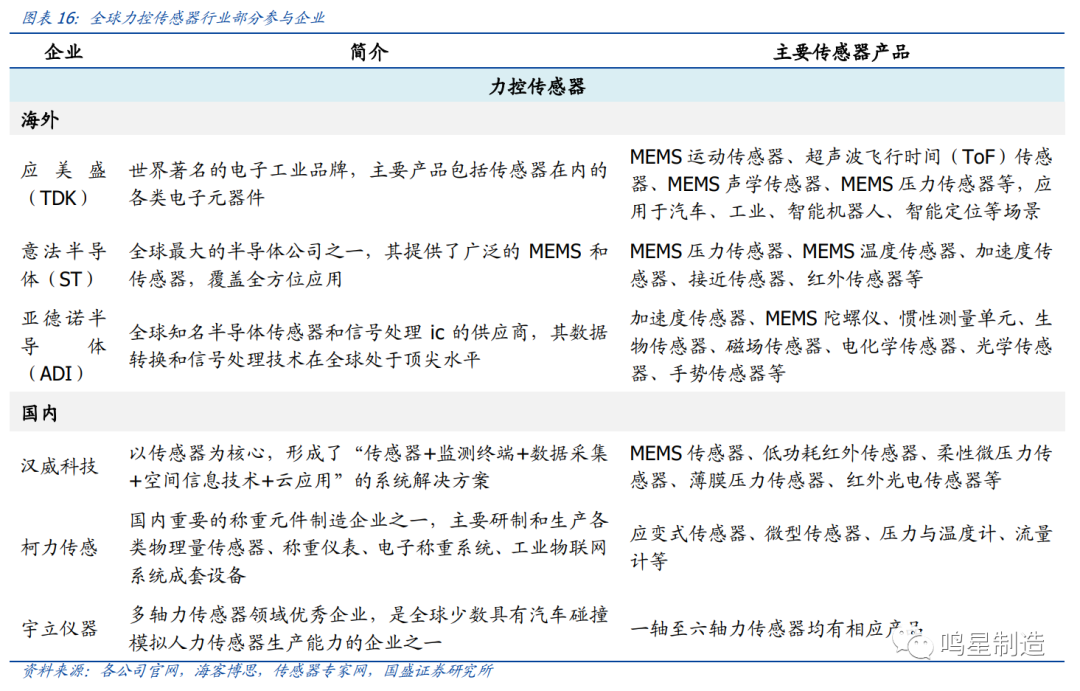
全球傳感器市場規模超萬億,我國高端傳感器仍處于起步階段。傳感器行業龍頭以海外公司為主,如安森美、基恩士、應美盛等,這類公司在其細分傳感器賽道收入規模高、市占率高。我國企業普遍規模較小,成長空間大。
應美盛:時代機遇助力高速擴張。應美盛是MEMS慣導傳感器的行業龍頭。應美盛在2011年至2016年間經歷了高速擴張階段,營業收入CAGR高達33.69%。應美盛成功的主要原因在于把握住了2007以來手機行業爆發性增長的動向,果斷切割了2010年之前主要的為任天堂等游戲機廠商提供慣導傳感器的業務轉而為主要手機廠商蘋果和三星等提供手機用MEMS慣導傳感器,充分享受了時代紅利。
國內企業積極布局高技術傳感器領域,順應行業浪潮打破海外龍頭壟斷。我國傳感器相關企業與海外龍頭相比普遍規模偏小,但仍然涌現出來一批如芯動聯科、漢威科技等掌握了核心技術的傳感器企業。同時這些企業積極布局人形機器人相關傳感器領域,把握時代機遇,有望順應時代潮流進一步擴大高端傳感器國產化率。
▲來源:廣發證券
視覺與力控傳感器:機器人感知應用需求最多
傳感器是機器人重要組成部分,價值量或僅次于關節模組。根據YOLE數據,2015-2021年無人機及機器人傳感器市場從3.51億美元增長至7.09億美元,復合增長率高達12.4%,其中光學傳感器占比達74%。
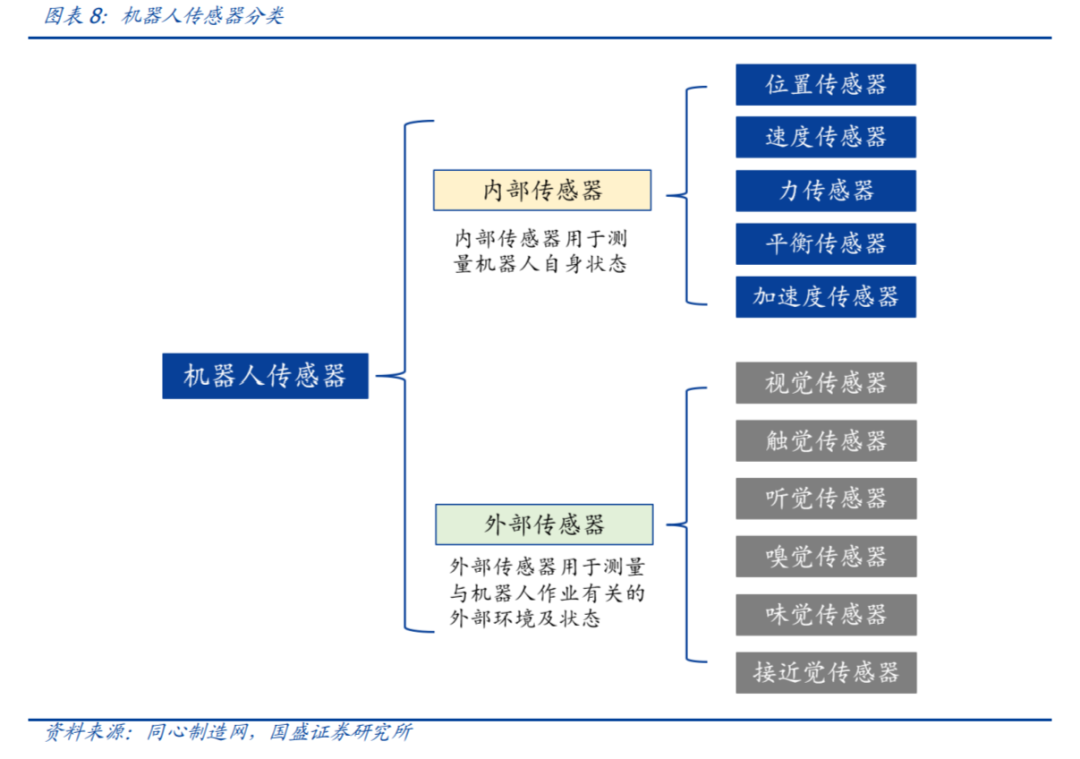
傳感器市場高增長率表明機器人對于傳感器有強烈需求。機器人傳感器可以分為內部傳感器和外部傳感器,其中內部傳感器主要用于測量機器人自身狀態,以實現獨立行走、動態平衡、一般肢體動作等;外部傳感器模仿人類感官,包括視覺、觸覺、聽覺、嗅覺、味覺、接近覺等傳感器。
通常來說,關節模組是人形機器人價值量占比最高的環節,占比一般在40%以上,我們通過梳理人形機器人傳感器的可能應用位置與數量,推測人形機器人傳感器價值量占比或僅次于關節模組。
視覺:機器人視覺的要點在于移動場景、精細描繪和高集成度。機器人自主導航與汽車自動駕駛技術系出同源,其中機器人視覺受限于內部空間,需具有更高集成度。機器人自主導航與汽車自動駕駛共同的三大關鍵技術為環境感知、規劃決策與執行控制,自動駕駛和機器人主要通過傳感器來獲取周圍環境信息。
常用的視覺和環境感知傳感器為攝像頭、雷達(毫米波、激光、超聲波等)、紅外傳感器、GPS、IMU等。

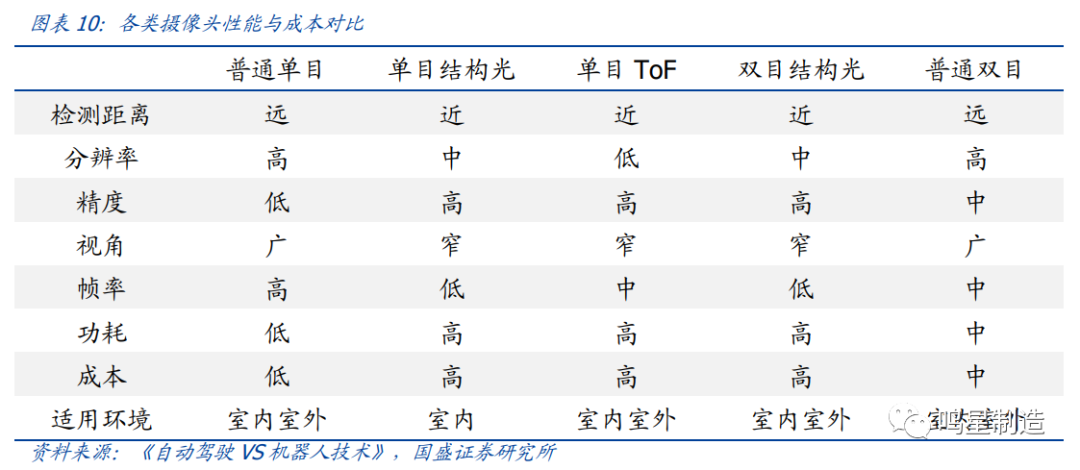
攝像頭:機器人的眼睛,包括普通單目攝像頭與深度攝像頭。
1)普通單目攝像頭:通過圖像匹配進行目標識別,再通過目標在圖像中的大小去估算目標距離,缺陷在于對距離的識別依賴于圖像識別的準確度;
2)單目結構光深度攝像頭:由一個RGB攝像頭、結構光投射器(紅外)和結構光深度感應器(CMOS)組成,通過投影一個預先設計好的圖案作為參考圖像(編碼光源),將結構光投射至物體表面,再通過深度感應器接收該物體表面反射的結構光圖案,由于接收圖案會因物體的立體形狀而發生變形,因此可以通過該圖案在攝像機上的位置和形變程度來計算物體表面的空間信息;
3)雙目深度攝像頭:雙目攝像頭的原理與人眼相似,通過對圖像視差進行計算,直接對前方景物進行距離測量;
4)ToF深度攝像頭:即飛行時間攝像頭,由光源、光學部件、傳感器、控制電路以及處理電路等幾部單元組成,通過給目標連續發送光脈沖,利用傳感器接收從物體返回的光,通過探測光脈沖的飛行(往返)時間來得到目標物體的距離。
激光雷達:激光器發射出脈沖激光打到物體引起散射,一部分光波會反射到激光雷達的接收器上,根據激光測距原理可計算出距離信息。脈沖激光不斷地掃描目標物,就可以得到目標物上全部目標點的數據,用此數據進行成像處理后,即可得到精確的目標物體圖像。激光雷達分為單線和多線,常見的多線激光雷達有4線,8線,16線,32線和64線。其缺陷在于激光雷達易受大氣條件及工作環境煙塵等影響,難以實現全天候工作,且成本高昂。
毫米波雷達:毫米波是指波長在 1-10mm 之間的電磁波,換算成頻率后,毫米波的頻率位于30-300GHz 之間。與紅外、激光等光學導引頭相比,毫米波導引頭穿透霧、煙、灰塵的能力強,傳輸距離遠,具有全天候全天時的特點。同時,毫米波雷達性能穩定,不受目標物體形狀、顏色等干擾。其主要缺陷在于成本較高,價格僅次于激光雷達。
超聲波雷達:超聲波雷達是利用傳感器內的超聲波發生器產生 40KHz的超聲波,再由接收探頭接收經障礙物反射回來的超聲波,根據超聲波反射接收的時間差計算與障礙物之間的距離。超聲波雷達成本較低,探測距離近,精度高,且不受光線條件的影響,因此常用于泊車系統中。其缺陷在于檢測角度較小,一輛車可能需要在不同角度安裝多個超聲波雷達。
紅外傳感器:紅外傳感器的測距基本原理為發光管發出紅外光,光敏接收管接收前方物體反射光,據此判斷前方是否有障礙物。根據發射光的強弱可以判斷物體的距離,它的原理是接收管接收的光強隨反射物體的距離而變化,距離近則反射光強,距離遠則反射光弱。
馬斯克在股東日表示,特斯拉已經打通了FSD和機器人的底層模塊,實現了一定程度的算法復用。FSD算法利用傳感器數據進行環境感知,這些傳感器也可以幫助機器人感知周圍環境,識別物體、人和障礙物等。
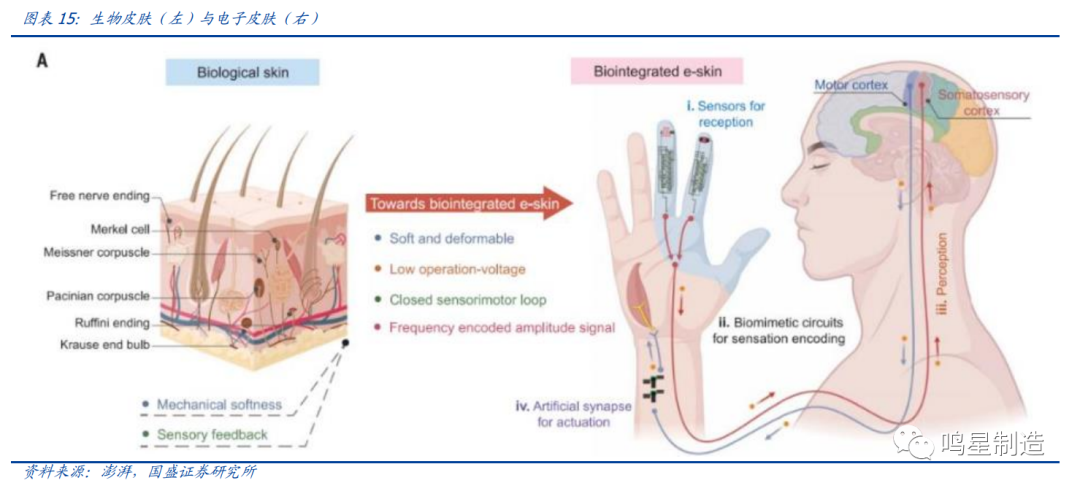
力控:多維力矩/力傳感是目前最優解,電子皮膚或為觸覺終極方案。目前機器人力控方案大致有3類,分別為電流環力控、多維力矩/力傳感器力控、被動力控(彈性體),其中多維力矩/力傳感器力控是當前力控的最佳方案,其硬件包括關節部位的單軸力矩傳感器和機器人執行器末端的6軸力傳感器。
同時,機器人若要模擬人體的觸覺,以及實現人體皮膚對溫度、濕度等外界物理量的感知,則電子皮膚可能是最佳路徑之一。電子皮膚需要集成各類傳感器和集成電路,并使用柔性的材料制作,壁壘較高,目前尚未在機器人領域大量應用。但從泛用性與仿生性角度,我們認為電子皮膚或是機器人觸覺的終極方案。
1)電流環力控:通過電機的電流閉環做力閉環反饋控制,適用于直驅電機或者帶小減速比的應用場景。其優點在于成本低,不需要增長額外的傳感設備,而缺點在于精度較低,響應較慢,適用場景有限。
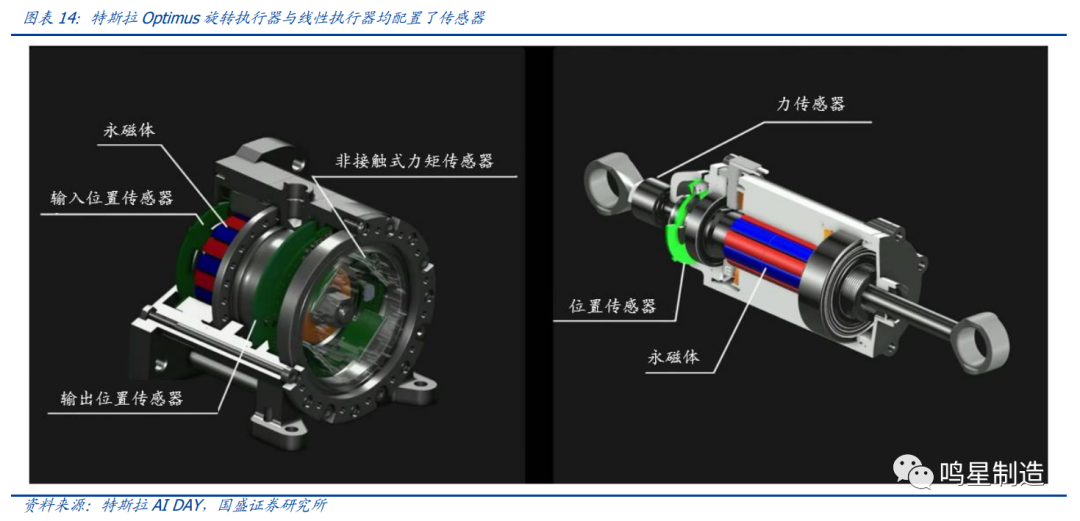
2)力矩/力傳感器力控:機器人中的力傳感器主要有關節部位的單軸力矩傳感器和機器人執行器末端的6軸力傳感器,測量機器人內部受力情況,以及末端執行器與外界環境交互的受力情況。這類力控方法是性能最佳,但成本最高的方案,典型應用案例為KUKA LBR iiwa機械手。特斯拉Optimus在旋轉關節執行器處配置了力矩傳感器,其在股東日上展示了機械手控制力道不打碎雞蛋的視頻,顯示出優秀的電機轉矩控制能力。
3)被動力控(彈性體):在末端執行器上添加彈性體,通過彈性體形變測量力矩,或用于向終端施加恒定力。該方案常用于低成本、高集成度的場景。
電子皮膚:最具潛力的觸覺傳感器,有望成為機器人觸覺終極方案。機器人若要模擬人體的觸覺,以及實現人體皮膚對溫度、濕度等外界物理量的感知,則電子皮膚可能是最佳路徑之一。想要復刻天然皮膚的功能,電子皮膚需要集成各類傳感器和集成電路,并使用柔性的材料制作,壁壘極高。
在實現上述工藝的同時,電子皮膚與機器人本體的包裹結合、信號傳輸等方面均是難點,因此,電子皮膚目前尚未在機器人領域大量使用。但從泛用性與仿生性角度,我們認為電子皮膚或是機器人觸覺的終極方案。
力控傳感器領域,國內尚未出現絕對龍頭,未來機器人有望帶來大量需求,推動國內企業快速發展。在力控傳感器領域,國內企業與海外龍頭差距較大,海外相關企業多為電子元器件綜合供應商,而國內企業尚未出現類似于視覺領域的絕對龍頭。我們認為,機器人有望帶來大量力控傳感器需求,國內相關企業有望持續受益。
慣導傳感器:人形機器人的姿態控制核心
慣導傳感器(IMU)是人形機器人姿態控制的核心。慣導傳感器是測量物體三軸姿態 角(或角速率)及加速度的裝置,可測量來自三個方向的線性加速度和旋轉角速率, 通過解算可獲得載體的姿態、速度和位移等信息。
在體育運動中,慣性傳感器由用 于測量力和加速度的加速度計,用于指示旋轉的陀螺儀和用于測量人體姿勢的磁力 計組成,這些傳感器跨三個軸收集數據并捕獲運動員的細微動作。
IMU傳感器通常較 為小型、輕便且具有長時間的電池待機時間。并且可以進行編程和設計,以解決使 用過程中的實際問題,從而對動作進行精細分析。同時,來自IMU的數據是連續、實時的。
在人形機器人中,慣導傳感器有望成為其姿態控制的核心。慣導傳感器是現代導航系統的關鍵組成部分之一。慣性傳感器按照精度通常分為分 為消費級、工業級、戰術級、導航級和戰略級這五種。其中,消費級慣導傳感器通常 應用在智能手機和汽車輔助駕駛,人形機器人和自動駕駛所使用的的慣導傳感器通 常為戰術級。
慣導傳感器按技術原理分為MEMS(微電子機械系統)、FOG(光纖陀螺儀)和ROG (激光陀螺儀)。MEMS慣導傳感器在精度上遜色于另外兩種技術路線的慣導傳感 器,但是由于價格便宜,體型小加上技術進步帶來的技術提升,消費類、汽車、高端 工業、無人系統、高可靠等領域中對精度要求較低的應用場景主要應用MEMS陀螺 儀。
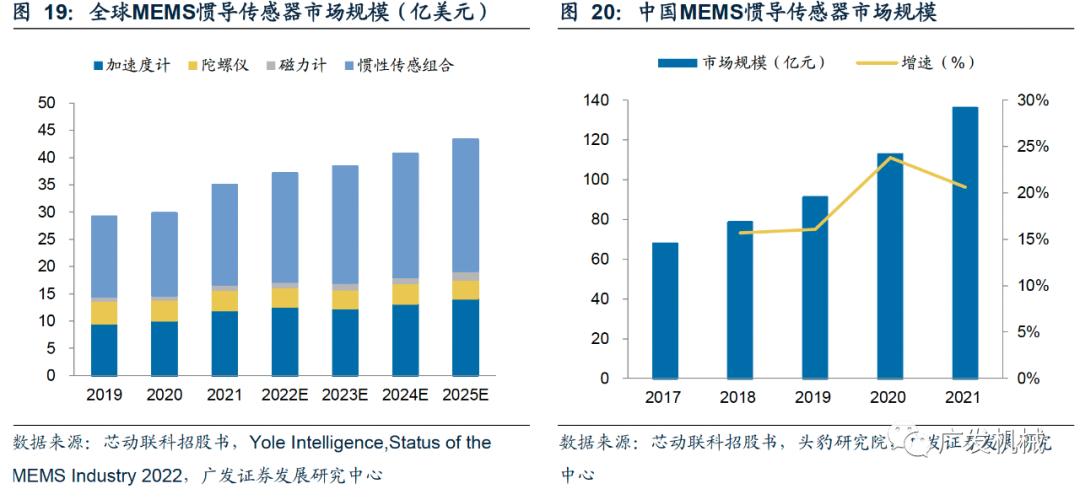
全球MEMS慣性導航傳感器市場規模超230億,中國市場超100億。據芯動聯科招股 書援引Yole發布的Status of MEMS Industry 2022中的數據, 2021年全球MEMS慣導 傳感器市場規模約35.09億元。據芯動聯科招股書援引的頭豹研究院數據,2021年中 國MEMS慣導傳感器市場規模約136億元,增速約為20.63%。
柔性傳感器潛在市場空間超500億,有望加速落地
柔性傳感器開啟智能傳感新時代,潛在市場空間有望超500億。柔性傳感器是指采用柔性材料制成的傳感器,具有良好的柔韌性、延展性,可以自由彎曲甚至折疊。柔性傳感器采用了柔性基板,其本質上是一種薄膜,通常采用聚酰亞胺(PI)、聚酯(PET)、聚二甲基硅氧烷(PDMS)等材料制成。
從剛性到柔性的突破,極大拓展了傳感器的應用場景,不僅是游戲領域中的智能穿戴設備,還有醫療大健康領域的電子皮膚、疾病診斷設備、健康監測設備、智能頸枕、智能按摩設備,消費領域的智能手環、元宇宙手套,智能家居領域的智能床墊,甚至是馬斯克提出的腦機接口。
根據漢威科技微信公眾號的數據,2021年至2028年全球柔性傳感器市場的年復合增長率達6.8%,預計2028年可達84.7億美元。
電子皮膚開啟人機交互新模式,機器人和腦機接口是兩大超級應用。
腦機接口是柔性傳感器的一大應用領域。柔性腦機接口的代表企業為Neuralink,2022年11月,Neuralink已經向FDA提交了大部分文件,審核通過后約六個月內,將在人類身上植入第一個Neuralink植入物。至此,柔性腦機接口終于與大部隊匯合,三種技術路線的侵入式腦機接口均已介入人體臨床。腦機接口行業有望迎來產業化落地,也表明柔性傳感器在細分應用場景下的進一步成熟。
機器人領域,電子皮膚的基本特征,是將各種電子元器件集成在柔性基板之上從而形成皮膚狀的電路板,像皮膚一樣具有很高的柔韌性和彈性,其能賦予機器人類似人類皮膚的敏感性,以及觸覺、視覺、聽覺、味覺和嗅覺等感知能力。電子皮膚可以廣泛應用于手術機器人領域,醫生佩戴電子皮膚可使手術機器人獲取實時信息讓手術更精準,而特斯拉推出人形機器人后,電子皮膚在機器人領域的產業化進度有望進一步被加快。
柔性傳感器國內外企業齊發力,學術研究為高階性能蓄力。目前,電子皮膚的研究已經取得一些進展,奧地利格拉茨技術大學最新研究的智能皮膚每平方毫米有2000個單獨的傳感器,但當前電子皮膚仍存在兼顧高柔性和高彈性難題、擴展性難題和制造成本高等痛點。
從國內外知名研究團隊和公司看,Interlink是全球領先的人機界面解決方案提供商,其持續在力覺傳感器上持續深耕,公司產品已被用于無數行業,包括汽車、機器人、醫療和消費電子產品等;國內企業中,漢威科技子公司能斯達在柔性壓電傳感器領域掌握自主知識產權,實現國產化完全替代,相關產品已在三甲醫院進行臨床實驗,柔性微納傳感器目前已在智能機器人領域有明確的應用;科研團隊當中,國內外主要的科研團隊如美國加州大學、新加坡國立大學、美國斯坦福大學和中國科學院等對于柔性傳感器、電子皮膚的研究進展皆處于邁向更高階性能的階段。未來,隨著技術的持續進步,電子皮膚產業化進程有望加快落地。
柔性傳感器打開想象空間,建議關注具備機器人應用潛力的國產標的:漢威科技,子公司能斯達開發的柔性微納傳感器已在智能機器人領域得到應用,該技術與電子皮膚兼容。
國產傳感器市場現狀,機器人逐漸邁入智能時代,重視傳感器環節增量機會
傳感器:傳感器是一種檢測裝置,能感受到被測量的信息,并能將感受到的信息,按一定規律變換成為電信號或其他所需形式的信息輸出,以滿足信息的傳輸、處理、存儲、顯示、記錄和控制等要求。
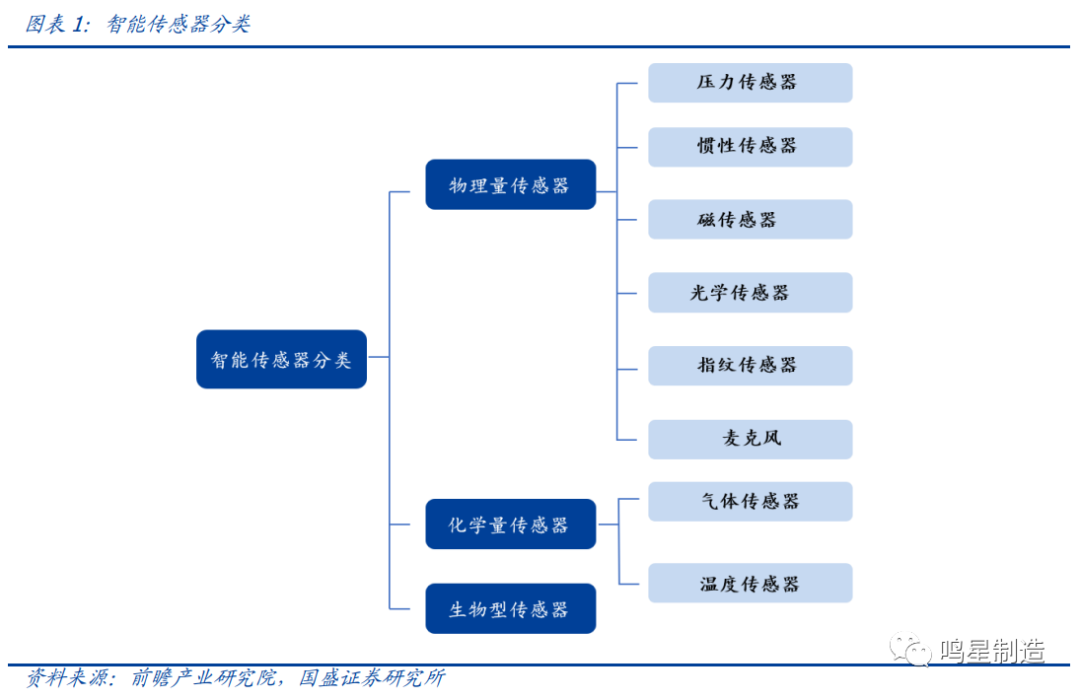
智能傳感器集傳感單元、通信芯片、微處理器、驅動程序、軟件算法等于一體,具有信息采集、信息處理、信息交換、信息存儲等功能。按照外界輸入的信號變換為電信號采用的效應,可將傳感器分為物理量傳感器、化學量傳感器和生物型傳感器三大類,按照“工作原理+應用領域”的分類依據具體展開,可分為壓力傳感器、慣性傳感器、磁傳感器、光學傳感器等。
萬物互聯的底座,智能傳感器下游行業應用廣泛。從發展歷程看,傳感器經歷了結構型、固體型、智能型三個階段,而前兩類傳感器,已經無法滿足當今時代對數據采集、處理等流程的需求,因此,融合了AI技術的智能傳感器開始受到關注。
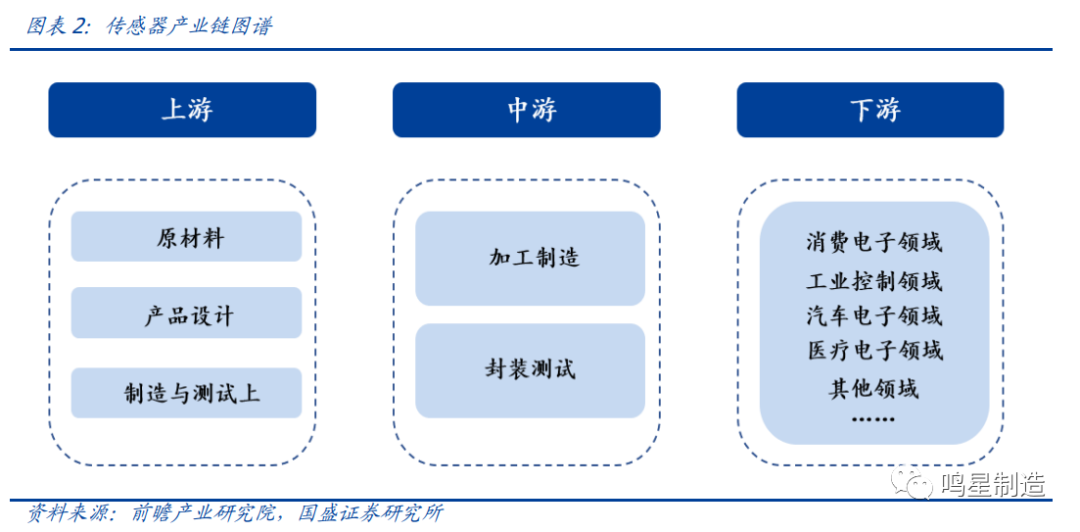
當前,智能傳感器在工業4.0時代扮演著十分重要的角色,其是是物聯網技術的最底層和最前沿,對物聯網產業發展有著十分重要的意義。從產業鏈角度來看,智能傳感器上游主要為設計、原材料以生產設備供應,下游涵蓋多個領域,包括消費電子、工業控制、汽車電子、醫療電子等。
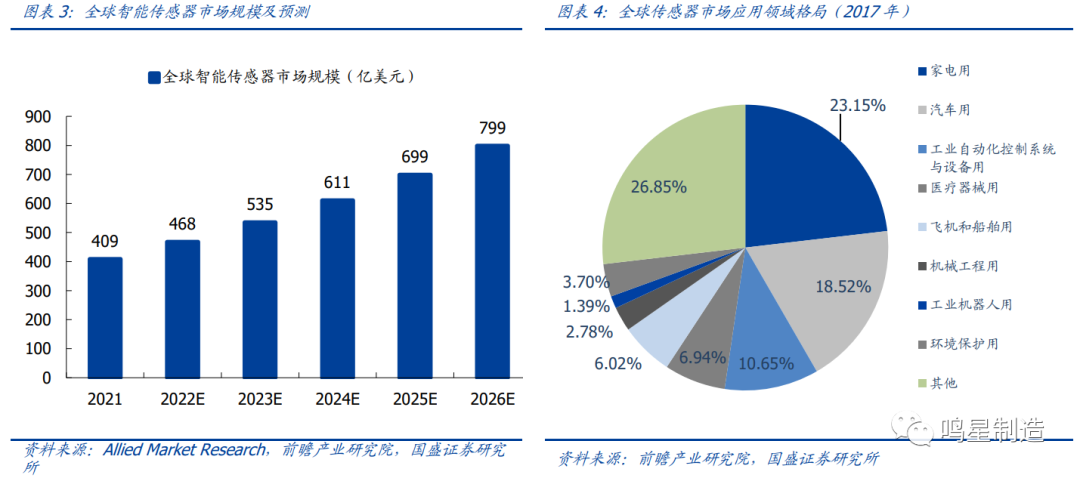
市場空間將逾500億美元,家電+汽車+工控是智能傳感器的主要應用領域。根據Allied Market Research的預測,2020-2026年,全球智能傳感器市場規模年均增速有望超過14%,預計到2026年,全球智能傳感器市場規模接近800億美元。從具體的下游分別看,智能傳感器主要聚焦在消費類產品和工業類產品,2017年家電和汽車分別占比達到23.15%和18.52%,占主要部分。此外,工控、醫療、飛機和船舶等領域對智能傳感器的使用量也較為普遍。
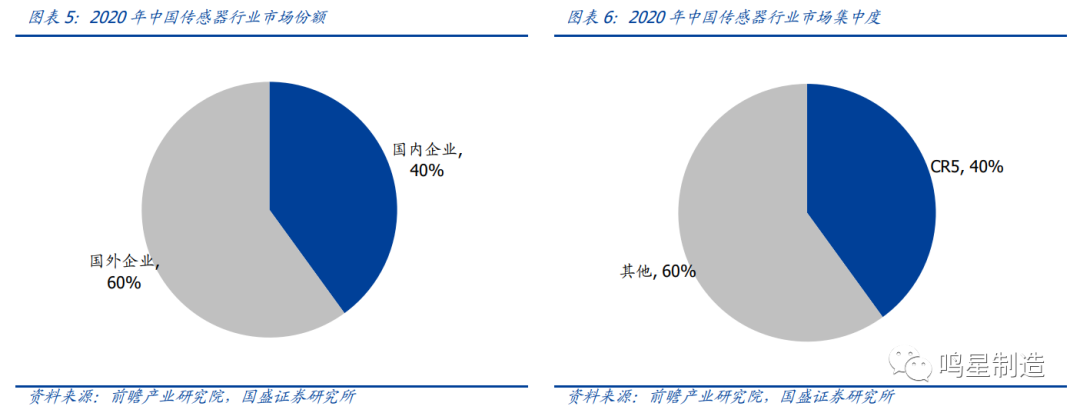
國內市場仍由外資主導,高端傳感器芯片約 80%依賴海外。當前,我國傳感器市場仍 舊由外資主導,國內供給能力略有不足,全球龍頭企業如愛默生、西門子、博世、意法 半導體、霍尼韋爾等跨國公司占據約 60%的國內市場份額,尤其在高端市場,約 80%的 傳感器芯片依賴海外企業,剩余的份額也只要集中在幾家上市公司手中。從國內格局看, 當前市場較集中,我國傳感器行業 TOP5 企業占據了國內傳感器市場約 40%以上的份額, 其余約 60%為中小企業,產品或主要集中在中低端,或未實現大規模應用。
本文部分資料來自:
廣發證券《傳感器行業研究:萬物互聯之眼,數據之源》,未來智庫
國盛證券《機器人硬件拆解2:視覺與力控》,鳴星制造
-
傳感器
+關注
關注
2551文章
51097瀏覽量
753529 -
機器人
+關注
關注
211文章
28418瀏覽量
207084 -
人形機器人
+關注
關注
2文章
451瀏覽量
16574
發布評論請先 登錄
相關推薦
《具身智能機器人系統》第1-6章閱讀心得之具身智能機器人系統背景知識與基礎模塊
觸覺傳感器的發展,對機器人產業有什么影響?

國產工業機器人與進口機器人區別有哪些
這位來自大疆、霍尼韋爾的傳感器專家,創業造機器人了

視覺傳感器助力機器人“看到”并理解周圍世界
紅杉中國聯手中芯投了無錫一家傳感器企業,人形機器人又帶火一條國產傳感器賽道!

其利天下技術·搭載無刷電機的掃地機器人的前景如何?
人形機器人領域六維力傳感器市場規模將達138.40億元

巨頭紛紛入局人形機器人,Sensor Shenzhen聚力開拓萬億市場!

工業機器人的觸覺傳感器有哪些?傳感器作用是什么?
人形機器人:3大核心傳感器技術壁壘及市場規模分析(1.3萬字)

全面分析:人形機器人快速發展,哪些國產傳感器將受益?(深度報告)

機器人會用到哪些傳感器
人形機器人柔性觸覺傳感器的關鍵技術分析





 工商網監
工商網監
評論