

本文導(dǎo)讀
今天,正運(yùn)動(dòng)小助手為大家分享一下運(yùn)動(dòng)控制卡周期上報(bào),通過提前設(shè)置經(jīng)常讀取的參數(shù)主動(dòng)周期上報(bào),可以減少PC主動(dòng)輪詢的時(shí)間。此次介紹將以ECI2A18B為例,主要講解如何使用C++編程語(yǔ)言來(lái)進(jìn)行周期上報(bào)函數(shù)的編寫和功能的開發(fā)。
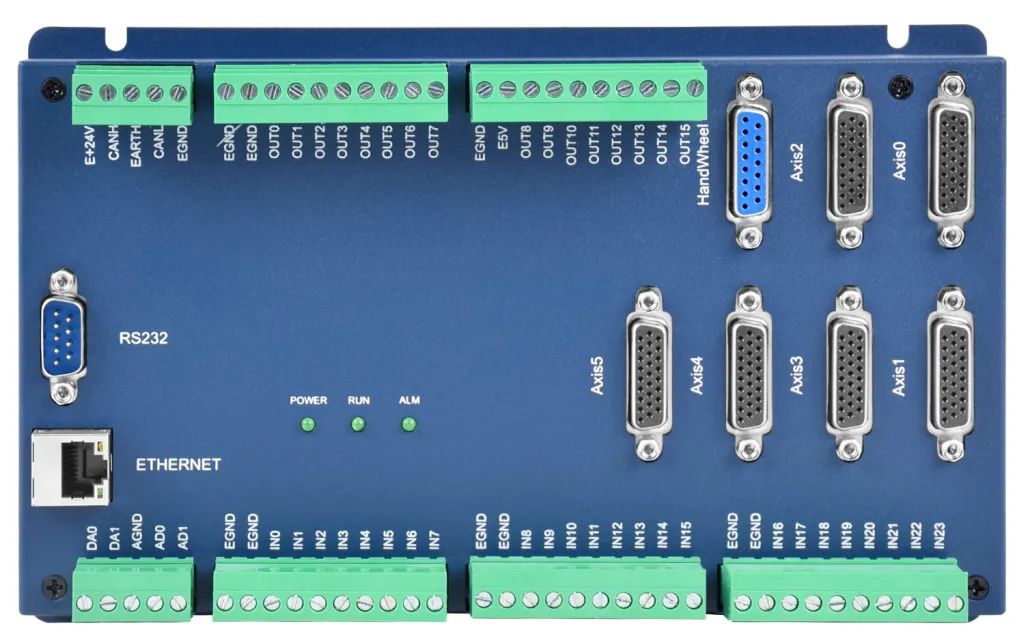
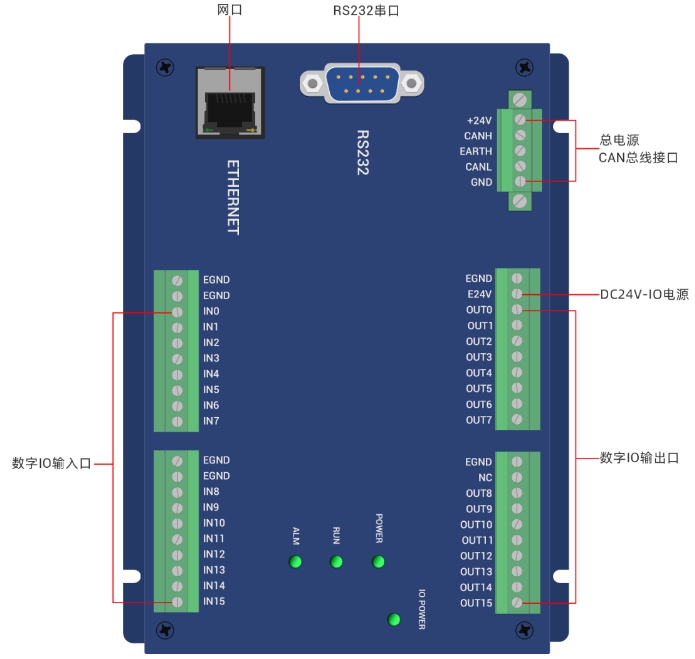
01ECI2A18B控制卡硬件介紹
ECI2A18B經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡是一款脈沖型、模塊化的網(wǎng)絡(luò)型運(yùn)動(dòng)控制卡。控制卡本身最多支持10軸,用以實(shí)現(xiàn)直線插補(bǔ)、任意圓弧插補(bǔ)、空間圓弧、螺旋插補(bǔ)、電子凸輪、電子齒輪、同步跟隨、虛擬軸、機(jī)械手指令等簡(jiǎn)單的軌跡控制需求;采用優(yōu)化的網(wǎng)絡(luò)通訊協(xié)議可以實(shí)現(xiàn)實(shí)時(shí)的運(yùn)動(dòng)控制。
ECI2A18B控制卡功能特點(diǎn):
(1)本身支持6差分脈沖軸+4單端脈沖軸運(yùn)動(dòng)控制,最多可擴(kuò)展至12軸運(yùn)動(dòng)控制。
(2)脈沖輸出模式:脈沖/方向或雙脈沖。
(3)AXIS接口支持編碼器位置測(cè)量,可以配置為手輪輸入模式。
(4)專用的手輪輸入接口。
(5)每軸最大輸出脈沖頻率10MHz。
(6)通過CAN總線,最多可擴(kuò)展到256個(gè)隔離輸入口和256個(gè)隔離輸出口。
(7)軸正負(fù)限位信號(hào)口/原點(diǎn)信號(hào)口可以隨意配置到任何輸入口。
(8)通用數(shù)字輸出口最大輸出電流可達(dá)500mA,可直接驅(qū)動(dòng)部分電磁閥。
(10)支持最多達(dá)12軸直線插補(bǔ)、任意圓弧插補(bǔ)、螺旋插補(bǔ)。
(11)支持點(diǎn)位運(yùn)動(dòng)、電子凸輪、直線插補(bǔ)、圓弧插補(bǔ)、連續(xù)插補(bǔ)運(yùn)動(dòng)、機(jī)械手指令。
(12)支持Basic多文件多任務(wù)編程。
(13)多種程序加密手段,保護(hù)客戶的知識(shí)產(chǎn)權(quán)。
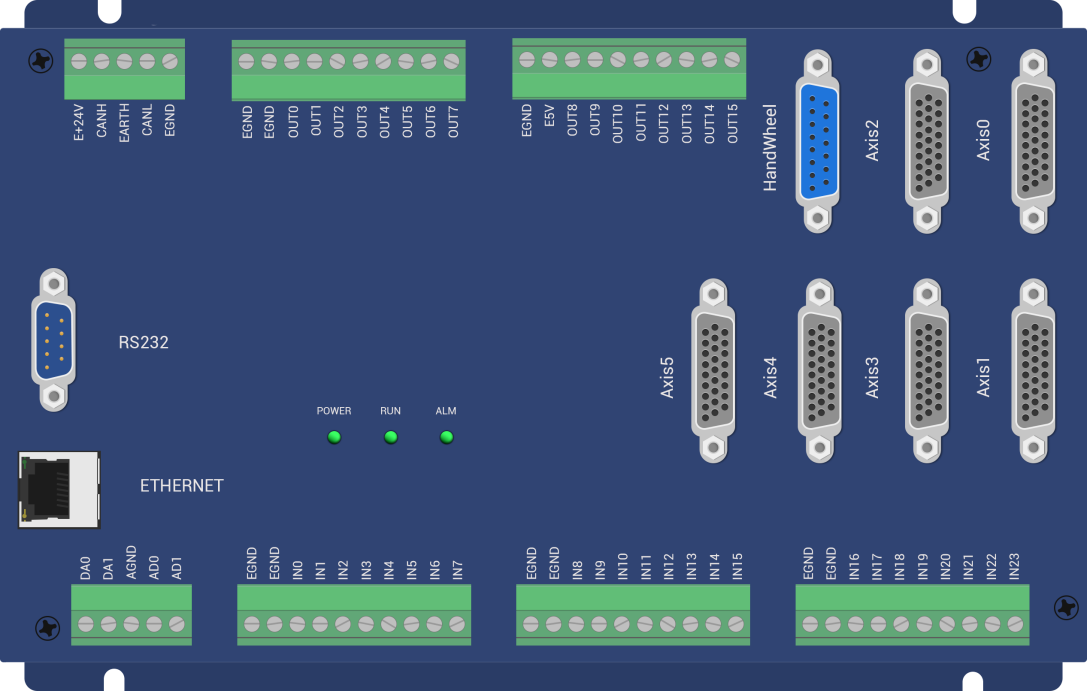
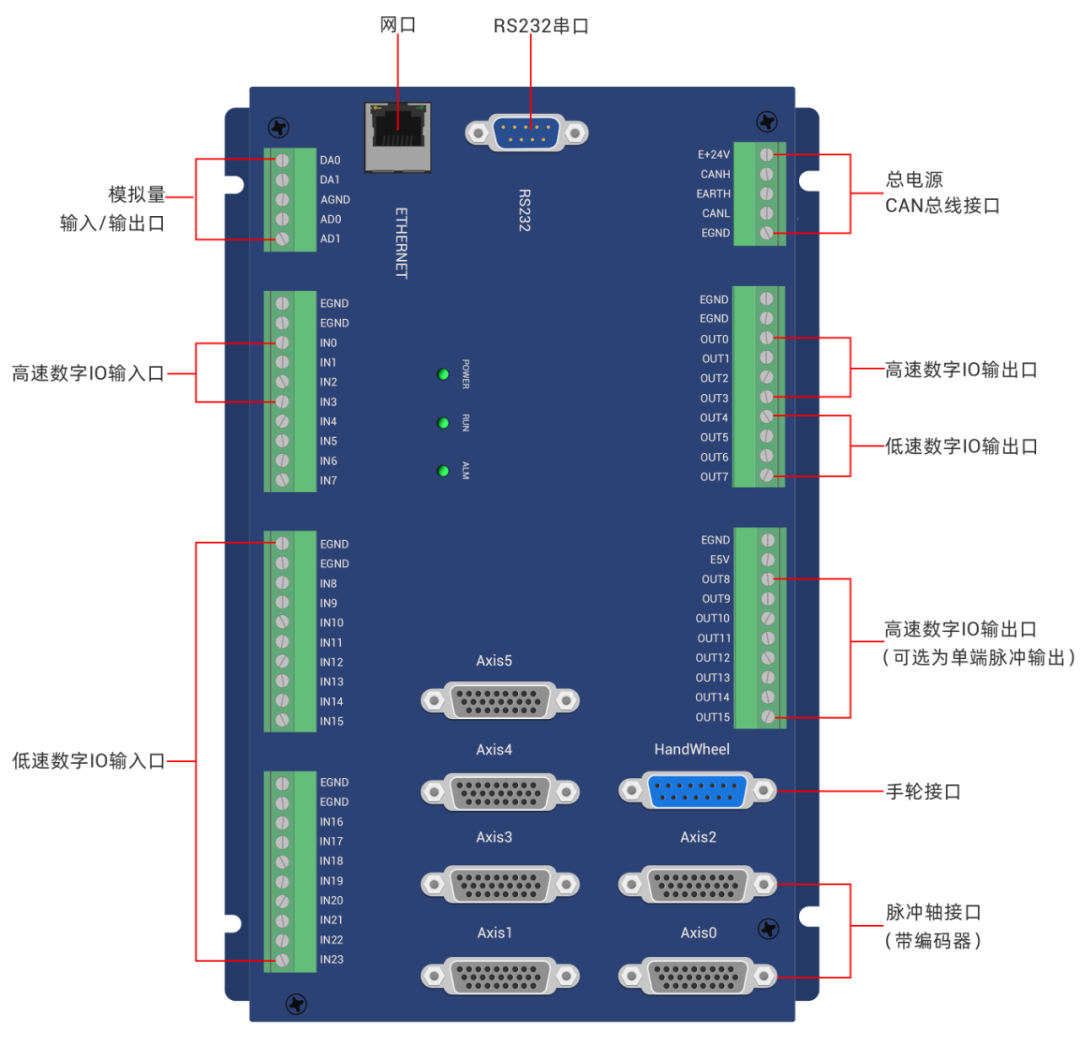
接口定義:
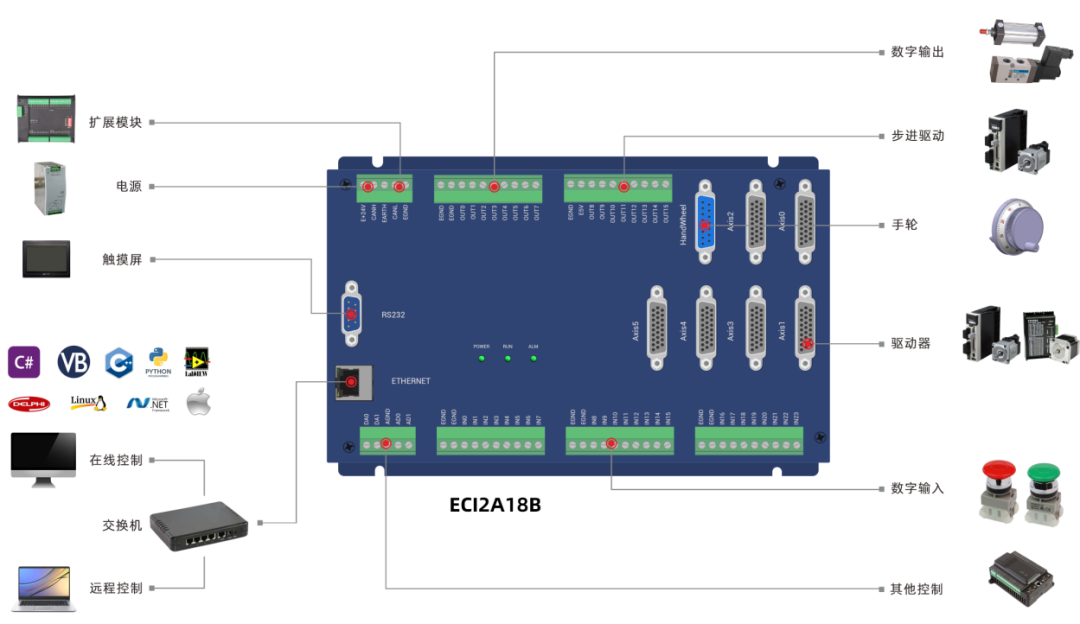
ECI2000系列經(jīng)濟(jì)型多軸運(yùn)動(dòng)控制卡可用于電子半導(dǎo)體設(shè)備(檢測(cè)類設(shè)備、組裝類設(shè)備、鎖附類設(shè)備、焊錫機(jī))、點(diǎn)膠設(shè)備和流水線等12軸以內(nèi)脈沖應(yīng)用場(chǎng)合。
控制器支持windows、linux、Mac、Android、wince各種操作系統(tǒng)下的開發(fā),提供vc、c#、vb.net、labview等各種環(huán)境的dll庫(kù),如下圖。上位機(jī)軟件編程參考《ZMotion PC函數(shù)庫(kù)編程手冊(cè)》。

02 為什么要進(jìn)行周期上報(bào),作用是什么?
1、當(dāng)PC主動(dòng)輪詢的次數(shù)過多時(shí),可能會(huì)導(dǎo)致以下問題:
(1)消耗系統(tǒng)資源
輪詢會(huì)使系統(tǒng)資源消耗增加,無(wú)論是任務(wù)輪詢或定時(shí)器輪詢,都會(huì)消耗系統(tǒng)的部分資源。在多用戶或者資源受限的環(huán)境里,這極有可能致使系統(tǒng)性能下滑。
(2)浪費(fèi)CPU資源
只要是輪詢都會(huì)造成CPU資源的浪費(fèi)。這是因?yàn)檩喸儠?huì)會(huì)在系統(tǒng)內(nèi)不間斷的運(yùn)行,不論當(dāng)前設(shè)備的狀態(tài)是否有改變。實(shí)際上,設(shè)備的諸多狀態(tài)并不經(jīng)常改變,輪詢空轉(zhuǎn)只會(huì)無(wú)端消耗CPU的時(shí)間。
(3)影響電源管理
向PC報(bào)告外圍設(shè)備次數(shù)增多會(huì)使功耗提高,這可能縮短電池壽命或增加能源消耗,從而影響電源管理。
(4)降低響應(yīng)速度
如果輪詢頻率過高,系統(tǒng)響應(yīng)其他任務(wù)的速度或許會(huì)變慢。造成原因是由于CPU會(huì)不間斷的輪詢當(dāng)前狀態(tài),從而響應(yīng)處理其他計(jì)算或與用戶交互任務(wù)會(huì)減慢。
(5)網(wǎng)絡(luò)負(fù)載增加
若輪詢涉及網(wǎng)絡(luò)通信,輪詢請(qǐng)求過多就可能加大網(wǎng)絡(luò)負(fù)載,造成網(wǎng)絡(luò)擁堵或者延遲加劇。
(6)服務(wù)器壓力增大
在客戶端服務(wù)器架構(gòu)里,要是頻繁進(jìn)行輪詢請(qǐng)求,就可能給服務(wù)器帶來(lái)壓力。主要集中在在服務(wù)器資源不足時(shí),也許會(huì)使服務(wù)質(zhì)量降低或者出現(xiàn)請(qǐng)求超時(shí)的情況。
2、多種獲取方式對(duì)于程序運(yùn)行占比的區(qū)別:
在探討單條獲取、多條獲取以及周期性獲取對(duì)程序運(yùn)行產(chǎn)生的影響時(shí),我們需要考量這些操作的特性以及它們對(duì)程序整體性能可能存在的潛在影響。
(1)單條獲取
單條獲取即程序每次僅處理一個(gè)單獨(dú)的數(shù)據(jù)項(xiàng)。此方式簡(jiǎn)單直接,然而處理大量數(shù)據(jù)時(shí)效率不高,因?yàn)槊看尾僮鞫紩?huì)有上下文切換與資源管理方面的開銷。此時(shí),程序運(yùn)行時(shí)間主要耗費(fèi)在數(shù)據(jù)處理上。
(2)多條獲取
多條獲取意味著同時(shí)處理多個(gè)數(shù)據(jù)項(xiàng)。在現(xiàn)代計(jì)算機(jī)系統(tǒng)里,常借助多線程或者并發(fā)技術(shù)達(dá)成這一操作,這樣做能大幅提升數(shù)據(jù)處理的吞吐量。不過,多線程雖有好處,卻可能被鎖爭(zhēng)、內(nèi)存競(jìng)爭(zhēng)和上下文切換等問題所抵消。所以,多條獲取也許會(huì)縮短單個(gè)數(shù)據(jù)項(xiàng)處理的相對(duì)運(yùn)行時(shí)間,但總體運(yùn)行時(shí)間能否減少取決于多線程優(yōu)化的成效。
(3)周期性獲取
周期獲取即按照固定的時(shí)間間隔重復(fù)開展數(shù)據(jù)獲取操作。在諸如實(shí)時(shí)監(jiān)控系統(tǒng)、定時(shí)任務(wù)這類需要定期更新數(shù)據(jù)狀態(tài)的應(yīng)用場(chǎng)景中較為常見。其運(yùn)行時(shí)間占比由任務(wù)的周期性和每個(gè)周期內(nèi)實(shí)際工作量決定。若周期性任務(wù)負(fù)載較輕,則對(duì)程序整體運(yùn)行時(shí)間影響不大。
應(yīng)用場(chǎng)合:
在實(shí)際應(yīng)用里,具體的應(yīng)用場(chǎng)景、數(shù)據(jù)特性以及性能要求決定了選擇何種數(shù)據(jù)獲取策略。比如,若程序要對(duì)單個(gè)事件快速響應(yīng),單條獲取或許更合適;要是旨在使數(shù)據(jù)處理速度最大化,多條獲取可能更有利;而對(duì)于那些需要定期保持?jǐn)?shù)據(jù)新鮮度的應(yīng)用而言,周期性獲取則不可或缺。
03 新建MFC項(xiàng)目并添加函數(shù)庫(kù)
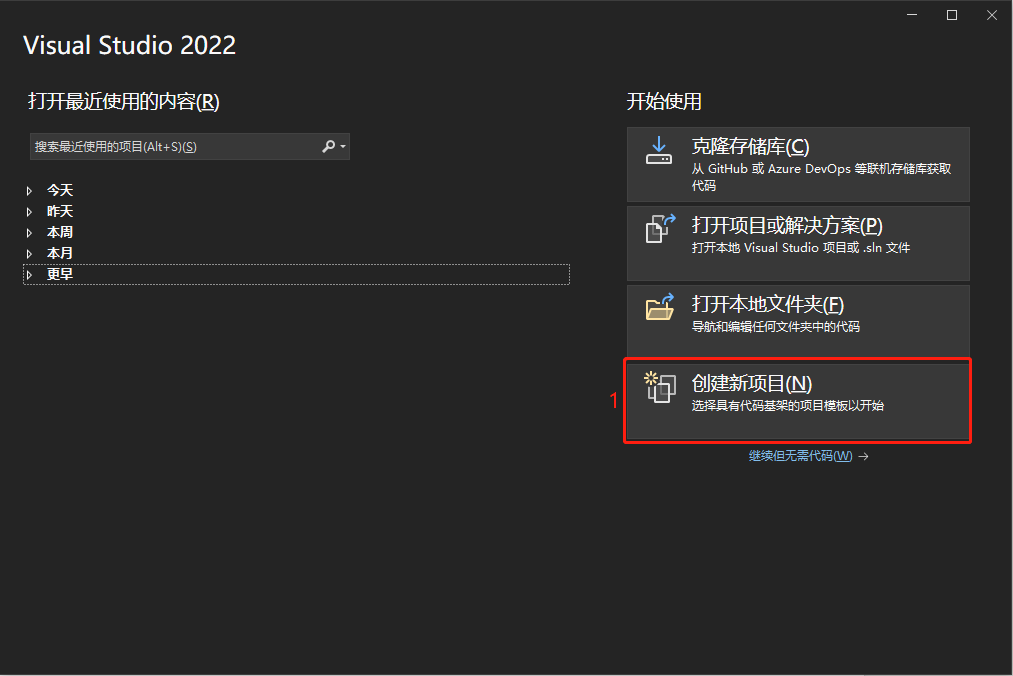
1、首先打開Visual Studio 2022,點(diǎn)擊創(chuàng)建新項(xiàng)目。
2、選擇開發(fā)語(yǔ)言為“Visual C++”和程序類型“MFC應(yīng)用程序”。
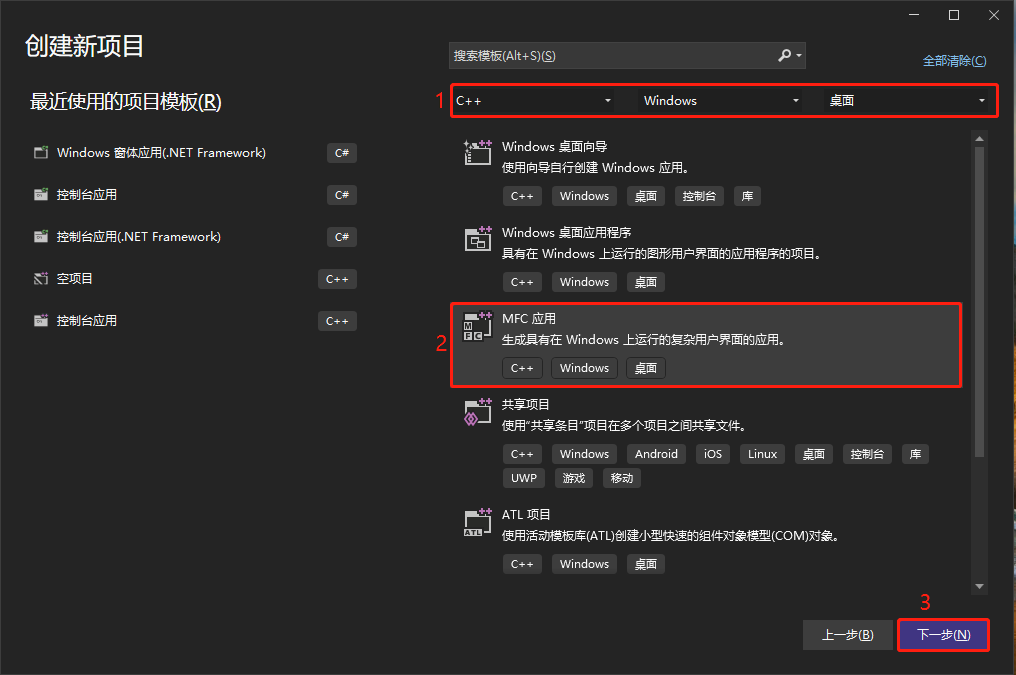
3、點(diǎn)擊下一步即可。
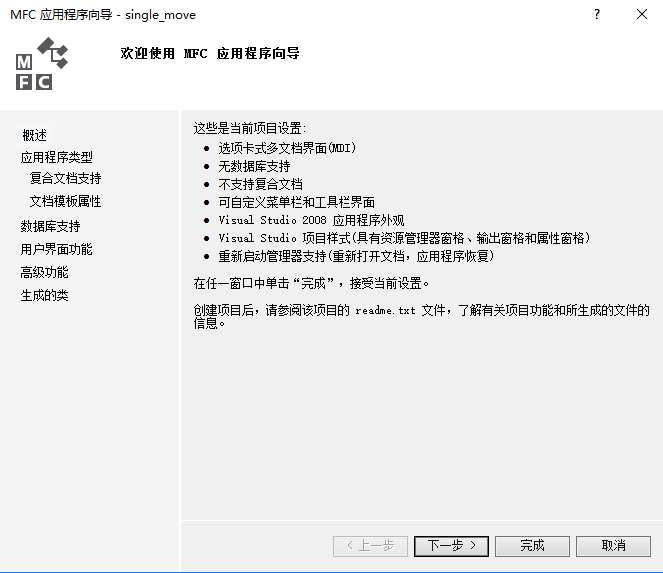
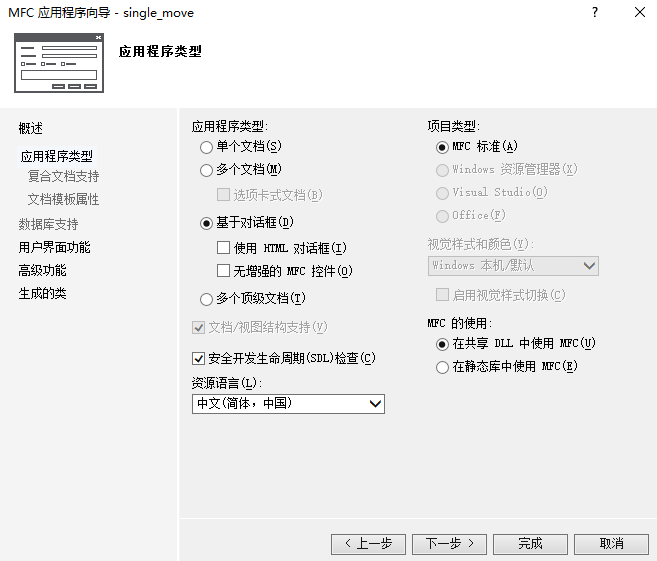
4、選擇類型為“基于對(duì)話框”,下一步或者完成。
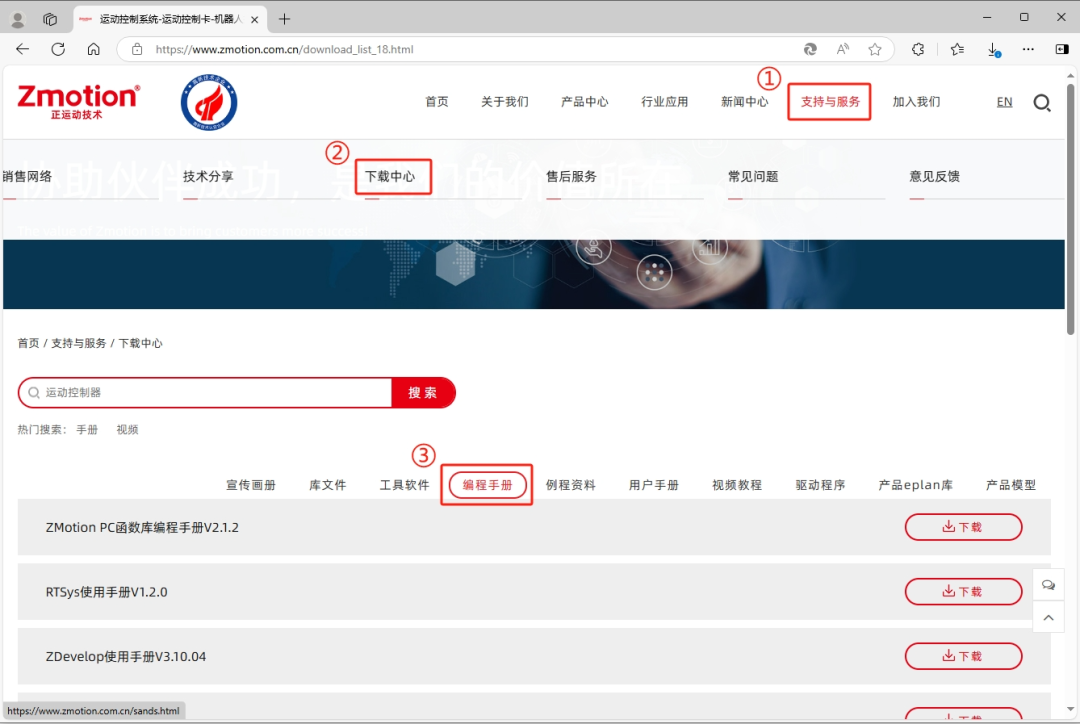
5、前往正運(yùn)動(dòng)官網(wǎng)下載PC函數(shù)庫(kù),路徑如下(本文采用64位函數(shù)庫(kù)為例)。
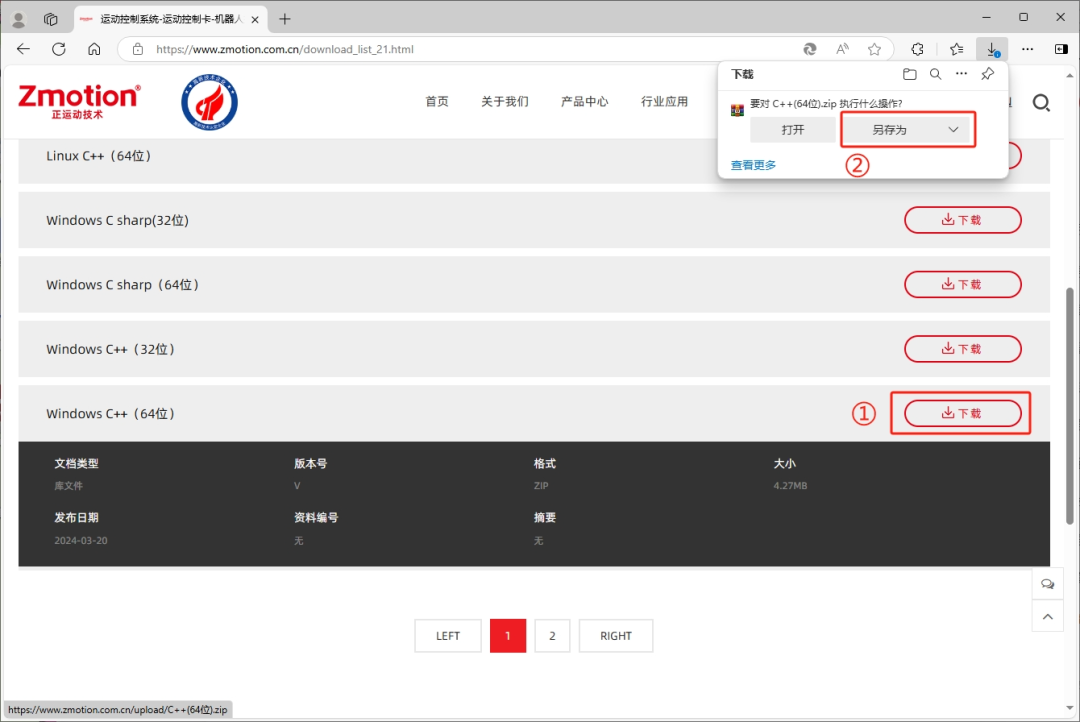
(1)進(jìn)入官網(wǎng),選擇支持與服務(wù),打開下載中心選擇庫(kù)文件,就能找到所有的PC函數(shù)庫(kù)。
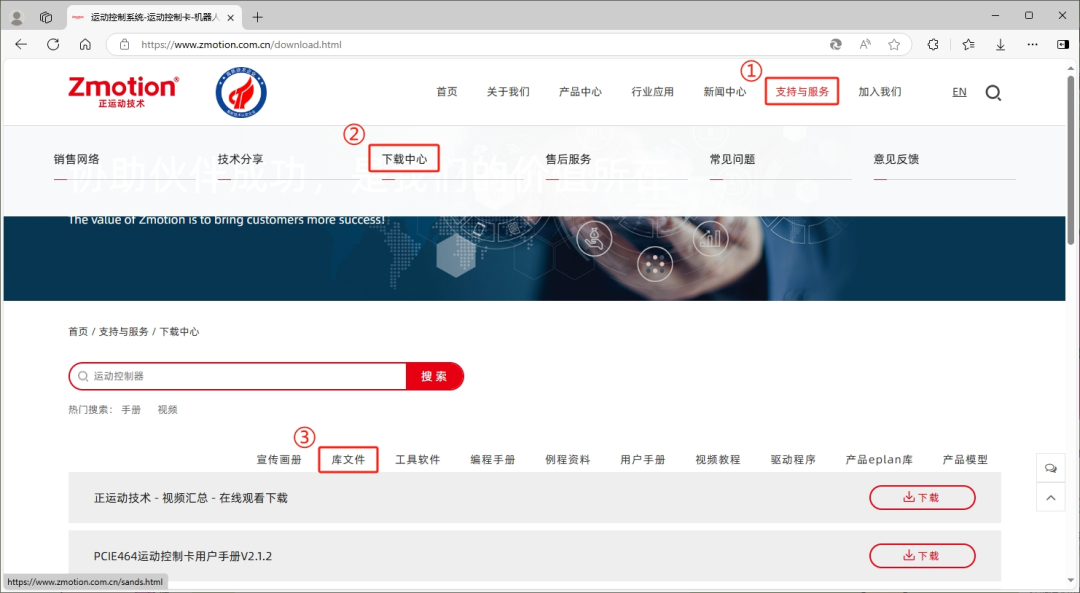
(2)點(diǎn)擊下載Windows C++(64位),可按需求另存為想要保存的路徑下。
(3)函數(shù)庫(kù)另存為具體路徑如下。
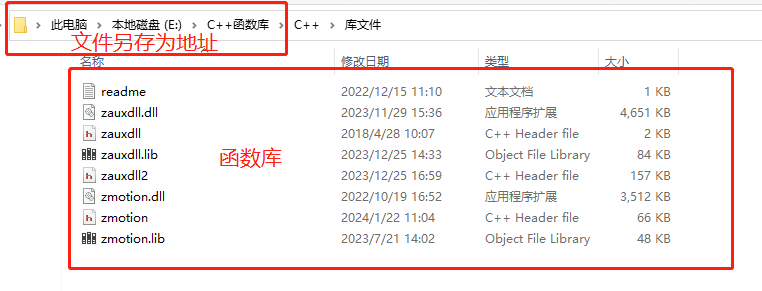
6、將廠商提供的C++庫(kù)文件和相關(guān)頭文件復(fù)制到新建的項(xiàng)目里。

7、在項(xiàng)目中添加靜態(tài)庫(kù)和相關(guān)頭文件。
(1)先右擊項(xiàng)目文件,接著依次選擇:“添加”→“現(xiàn)有項(xiàng)”。
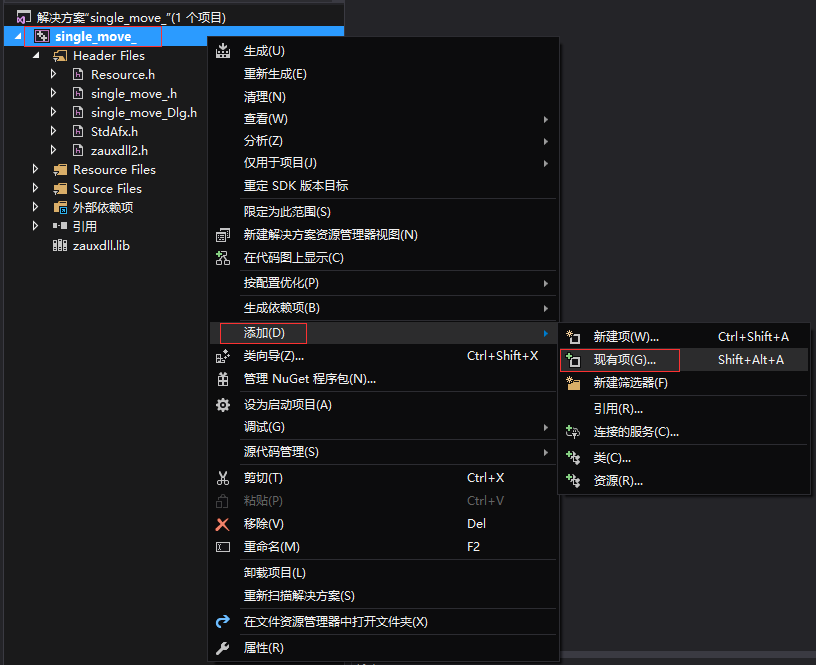
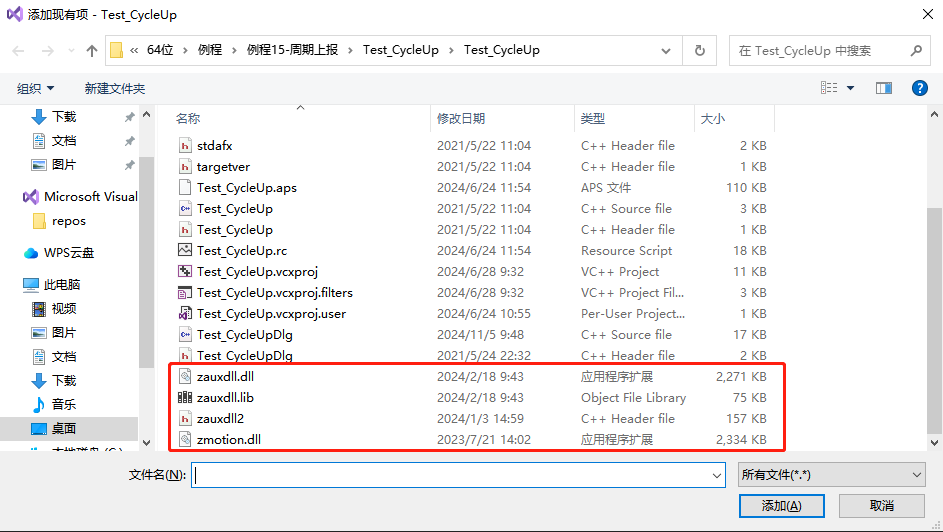
(2)在彈出的窗口中依次添加靜態(tài)庫(kù)和相關(guān)頭文件。
8、聲明用到的頭文件和定義控制器連接句柄。
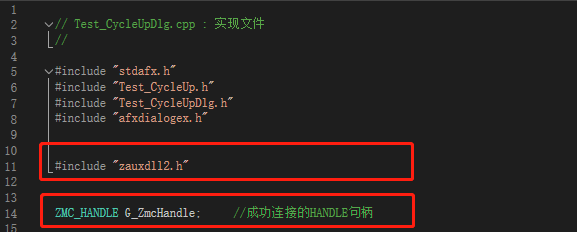
至此項(xiàng)目新建完成,可進(jìn)行MFC項(xiàng)目開發(fā)。
04 查看PC函數(shù)手冊(cè),熟悉相關(guān)函數(shù)接口
1、PC函數(shù)手冊(cè)也可以在正運(yùn)動(dòng)官網(wǎng)“支持與服務(wù)”→“下載中心”→“編程手冊(cè)”中找到。
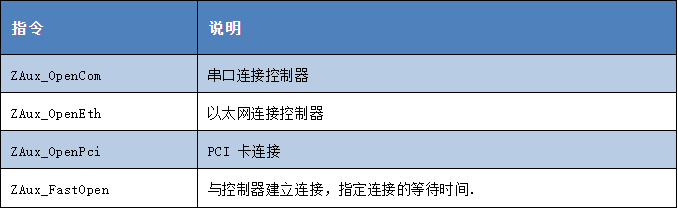
2、鏈接控制器,獲取鏈接句柄。
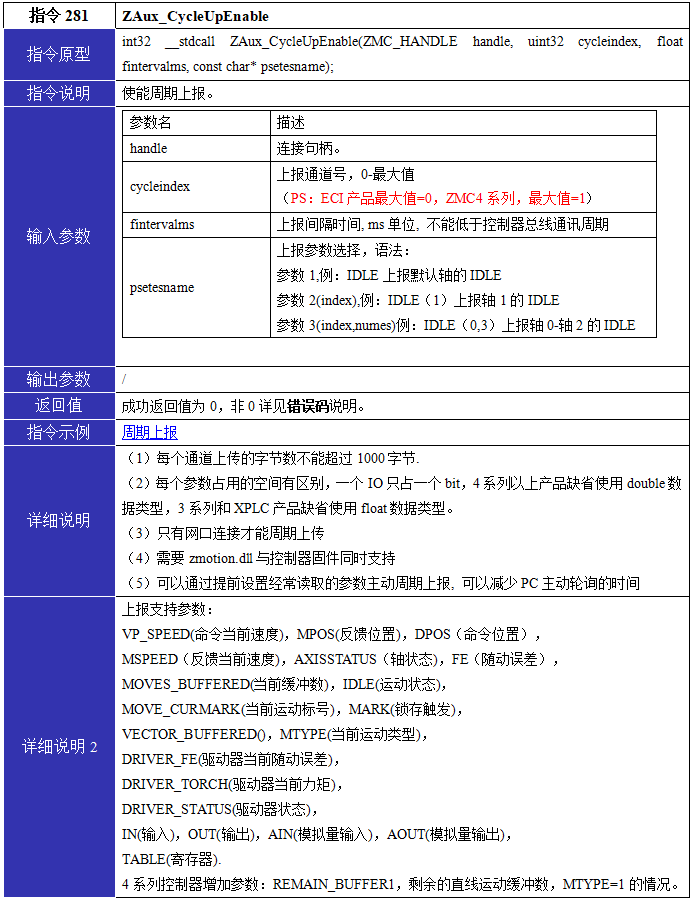
3、控制器自動(dòng)上報(bào)相關(guān)指令。
4、讀取數(shù)字輸入輸出相關(guān)指令。

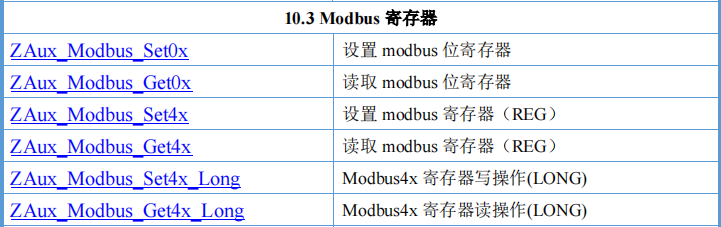
5、讀取Modbus寄存器相關(guān)指令。
05 MFC實(shí)現(xiàn)軸的周期上報(bào)
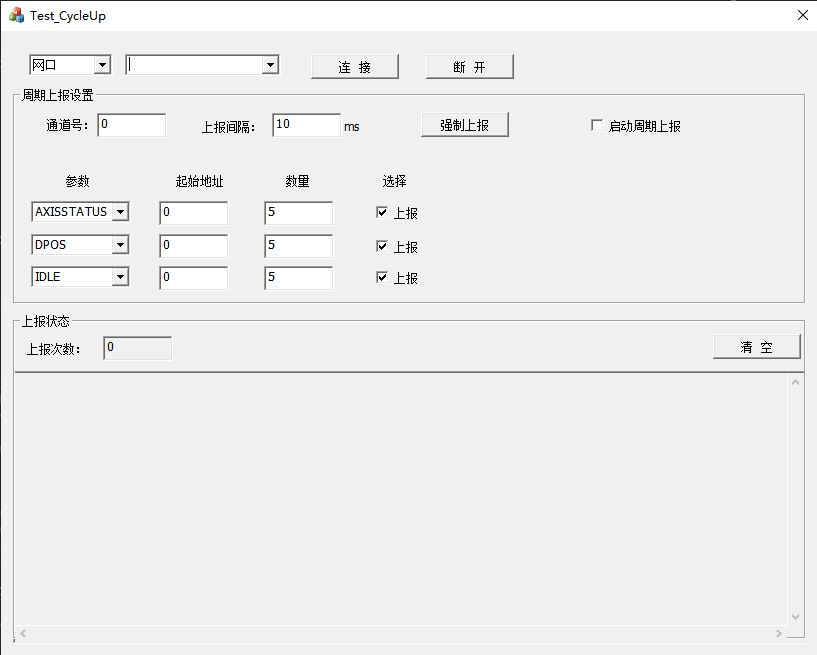
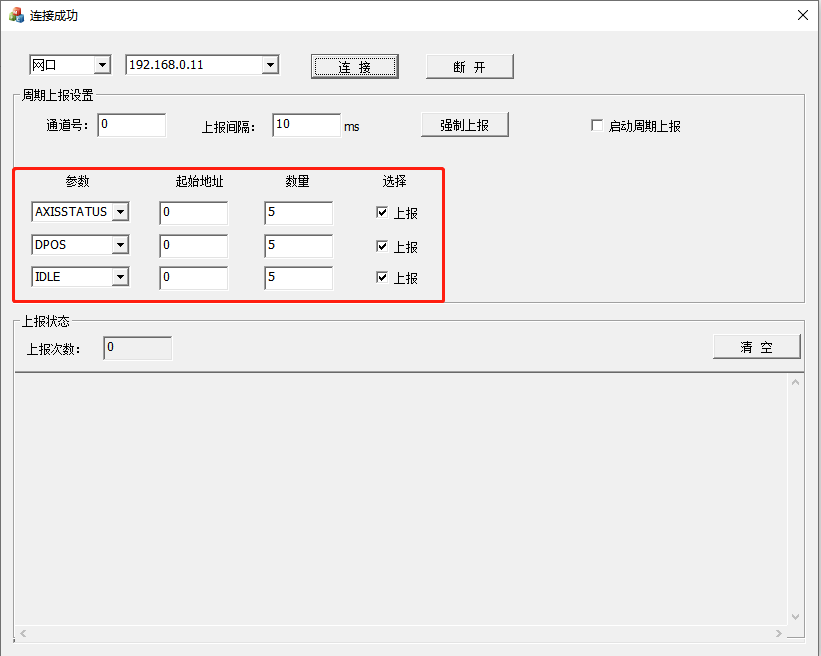
1、例程界面如下。
2、通過下拉控件選擇連接控制器/控制卡連接方式。
BOOL CTest_CycleUpDlg::OnInitDialog() { CDialogEx::OnInitDialog(); // 將“關(guān)于...”菜單項(xiàng)添加到系統(tǒng)菜單中。 // IDM_ABOUTBOX 必須在系統(tǒng)命令范圍內(nèi)。 ASSERT((IDM_ABOUTBOX & 0xFFF0) == IDM_ABOUTBOX); ASSERT(IDM_ABOUTBOX < 0xF000); CMenu* pSysMenu = GetSystemMenu(FALSE); if(pSysMenu != NULL) { BOOL bNameValid; CString strAboutMenu; bNameValid = strAboutMenu.LoadString(IDS_ABOUTBOX); ASSERT(bNameValid); if(!strAboutMenu.IsEmpty()) { pSysMenu-?>AppendMenu(MF_SEPARATOR); pSysMenu->AppendMenu(MF_STRING, IDM_ABOUTBOX,strAboutMenu); } } // 設(shè)置此對(duì)話框的圖標(biāo)。當(dāng)應(yīng)用程序主窗口不是對(duì)話框時(shí),框架將自動(dòng) // 執(zhí)行此操作 SetIcon(m_hIcon, TRUE); // 設(shè)置大圖標(biāo) SetIcon(m_hIcon, FALSE); // 設(shè)置小圖標(biāo) // TODO: 在此添加額外的初始化代碼 GetDlgItem(IDC_COMBO2)->SetWindowTextA("網(wǎng)口n"); CComboBox *connetList; connetList = (CComboBox *)GetDlgItem(IDC_COMBO2); connetList->AddString(_T("網(wǎng)口n")); connetList->AddString(_T("LOCALn")); connetList->AddString(_T("PCIn")); connetList->AddString(_T("串口n")); return TRUE; // 除非將焦點(diǎn)設(shè)置到控件,否則返回 TRUE }
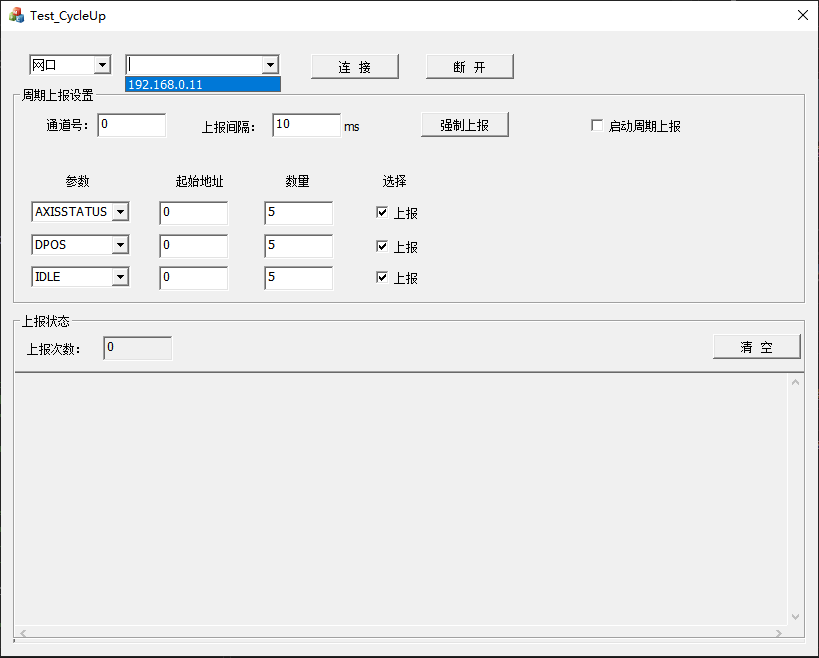
3、自動(dòng)搜索IP。
void CTest_CycleUpDlg::OnCbnDropdownCombo1() { char Buffer[256]; CTest_CycleUpDlg* pDlg = (CTest_CycleUpDlg*)AfxGetMainWnd(); GetDlgItemText(IDC_COMBO2,Buffer,256); Buffer[255] = ''; if(0==strcmp(Buffer,"串口n")) { Com_SCAN(pDlg); } else if(0==strcmp(Buffer,"網(wǎng)口n")) { IP_SCAN(pDlg); } else if(0==strcmp(Buffer,"PCIn")) { PCI_SCAN(pDlg); } else if(0==strcmp(Buffer,"LOCALn")) { CComboBox *m_pEthList; m_pEthList = (CComboBox *)GetDlgItem(IDC_COMBO1); m_pEthList->ResetContent(); m_pEthList->AddString(_T("LOCAL1n")); }else { CString str; MessageBox("請(qǐng)選擇正確的鏈接類型!"); return; } return; }
4、開啟上報(bào)。
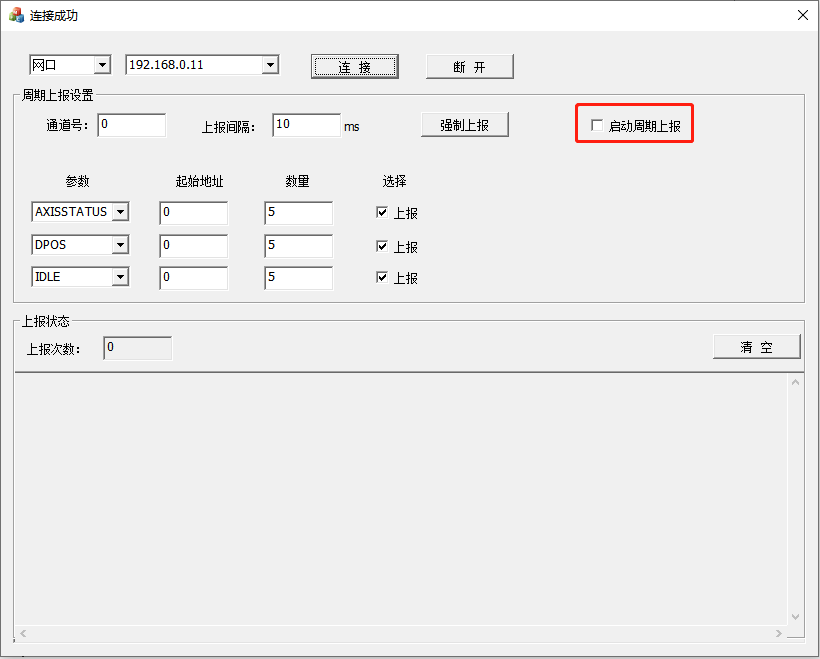
//開啟關(guān)閉上報(bào) void CTest_CycleUpDlg::OnBnClickedCheckStart() { if(NULL == G_ZmcHandle) { MessageBox(_T("控制器未連接")); return; } CString tempstr; UpdateData(true); int iret = 0; if(m_If_StartUp) //開啟上報(bào) { GetCycleStr(); iret = ZAux_CycleUpEnable(G_ZmcHandle,m_CyclePort,m_CycleTime,Str_CycleCmd); if(ERR_SUCCESS != iret) { tempstr.Format("周期上報(bào)打開失敗!錯(cuò)誤碼:%d 命令:%srn",iret,Str_CycleCmd); AppendTextOut(tempstr); return; } tempstr.Format("周期上報(bào)開始!命令:%srn",Str_CycleCmd); AppendTextOut(tempstr); ifirsttimeus = GetTickCount(); SetTimer(1,1,NULL); } else { m_CycleCount = ZAux_CycleUpGetRecvTimes(G_ZmcHandle,m_CyclePort); iret = ZAux_CycleUpDisable(G_ZmcHandle,m_CyclePort); if(ERR_SUCCESS != iret) { tempstr.Format("周期上報(bào)關(guān)閉失敗!錯(cuò)誤碼:%d rn",iret); AppendTextOut(tempstr); return; } tempstr.Format("周期上報(bào)關(guān)閉-上報(bào)用時(shí):%dms, 上報(bào)次數(shù):%d ,平均時(shí)間:%.3fmsrn",(GetTickCount() - ifirsttimeus),m_CycleCount,(float)(GetTickCount() - ifirsttimeus)/m_CycleCount); AppendTextOut(tempstr); KillTimer(1); } }
5、選擇獲取參數(shù)類型和起始地址及數(shù)量。
//獲取上報(bào)參數(shù) void CTest_CycleUpDlg::GetCycleStr() { memset(Str_CycleCmd,0,sizeof(Str_CycleCmd)); CString TempString = ""; int ilen = 0; if(m_CycleParaEnAble[0]) { switch(m_CyclePara[0]) { case 0: //AXISSTATUS TempString.Format("AXISSTATUS(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 1: //DPOS TempString.Format("DPOS(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 2: //IDLE TempString.Format("IDLE(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 3: //IN TempString.Format("IN(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 4: //MODBUS_REG TempString.Format("MODBUS_REG(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 5: //MPOS TempString.Format("MPOS(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 6: //OP TempString.Format("OP(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; case 7: //TABLE TempString.Format("TABLE(%d,%d),",m_CycleParaStart[0],m_CycleParaNum[0]); break; default: break; } } ilen += TempString.GetLength(); memcpy(Str_CycleCmd,TempString.GetBuffer(0),TempString.GetLength()*sizeof(TCHAR)); if(m_CycleParaEnAble[1]) { switch(m_CyclePara[1]) { case 0: //AXISSTATUS TempString.Format("AXISSTATUS(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 1: //DPOS TempString.Format("DPOS(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 2: //IDLE TempString.Format("IDLE(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 3: //IN TempString.Format("IN(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 4: //MODBUS_REG TempString.Format("MODBUS_REG(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 5: //MPOS TempString.Format("MPOS(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 6: //OP TempString.Format("OP(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; case 7: //TABLE TempString.Format("TABLE(%d,%d),",m_CycleParaStart[1],m_CycleParaNum[1]); break; default: break; } } if((ilen + TempString.GetLength()) < 1000) { memcpy(&Str_CycleCmd[ilen],TempString.GetBuffer(0),TempString.GetLength()*sizeof(TCHAR)); ilen += TempString.GetLength(); } if(m_CycleParaEnAble[2]) { switch(m_CyclePara[2]) { case 0: //AXISSTATUS TempString.Format("AXISSTATUS(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 1: //DPOS TempString.Format("DPOS(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 2: //IDLE TempString.Format("IDLE(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 3: //IN TempString.Format("IN(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 4: //MODBUS_REG TempString.Format("MODBUS_REG(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 5: //MPOS TempString.Format("MPOS(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 6: //OP TempString.Format("OP(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; case 7: //TABLE TempString.Format("TABLE(%d,%d)",m_CycleParaStart[2],m_CycleParaNum[2]); break; default: break; } } if((ilen + TempString.GetLength()) < 1000) { memcpy(&Str_CycleCmd[ilen],TempString.GetBuffer(0),TempString.GetLength()*sizeof(TCHAR)); ilen += TempString.GetLength(); } }
6、獲取上報(bào)結(jié)果并輸出。
//獲取上報(bào)結(jié)果 void CTest_CycleUpDlg::GetCycleInfo() { CString ParaString = ""; CString TempString = ""; CString ShowString = ""; int iret = 0; int ival = 0; for(int inum=0;inum
7、強(qiáng)制上報(bào)一次。
//強(qiáng)制上報(bào)一次 void CTest_CycleUpDlg::OnBnClickedBtnCycleup() { if(NULL == G_ZmcHandle) { MessageBox(_T("控制器未連接")); return; } UpdateData(true); int iret = ZAux_CycleUpForceOnce(G_ZmcHandle, m_CyclePort); if(ERR_SUCCESS != iret) { MessageBox(_T("周期上報(bào)刷新失敗!")); return; } }
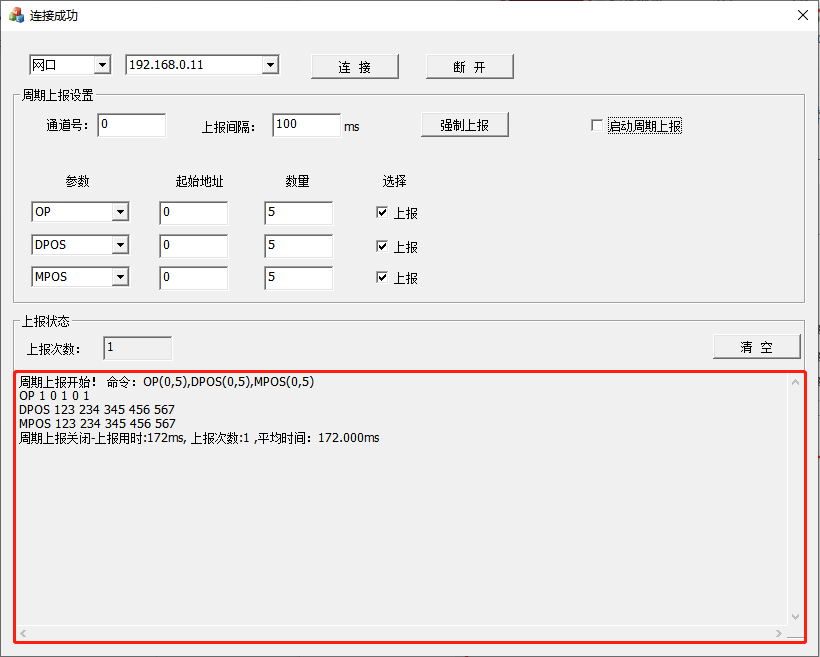
8、使用正運(yùn)動(dòng)RTSys軟件輸出窗口和軸參數(shù)窗口方便直接的觀察到我們周期上報(bào)的數(shù)值。

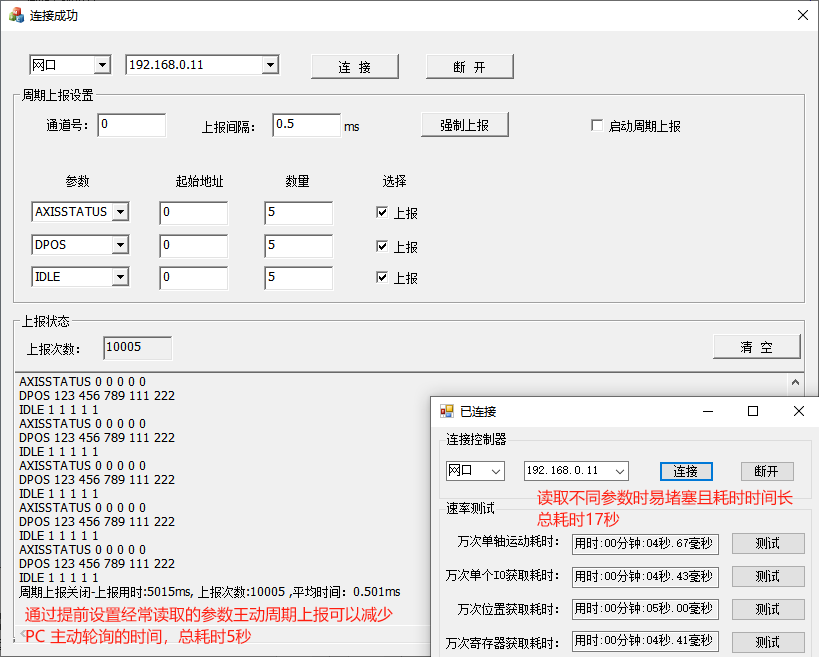
9、上位機(jī)讀取周期上報(bào)的值并輸入在文本框。
10、可以點(diǎn)擊下拉框選擇其他參數(shù)或更改起始地址及數(shù)量讀取不同區(qū)域數(shù)據(jù)。
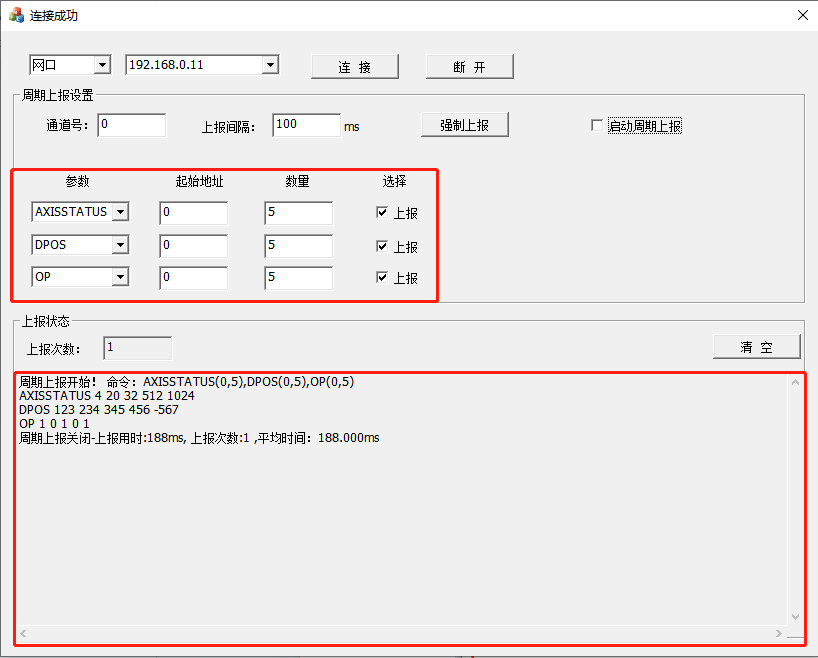
11、周期上報(bào)獲取信息和單次獲取信息的比較。
12、視頻教程。
教學(xué)視頻可點(diǎn)擊→“教學(xué)視頻:運(yùn)動(dòng)控制卡周期上報(bào)實(shí)時(shí)數(shù)據(jù)IO狀態(tài)之C++篇”查看。
本次,正運(yùn)動(dòng)運(yùn)動(dòng)控制卡周期上報(bào)實(shí)時(shí)數(shù)據(jù)IO狀態(tài)之C++篇就分享到這里。
更多精彩內(nèi)容請(qǐng)關(guān)注“正運(yùn)動(dòng)小助手”公眾號(hào),需要相關(guān)開發(fā)環(huán)境與例程代碼,請(qǐng)咨詢正運(yùn)動(dòng)技術(shù)銷售工程師:400-089-8936。
本文由正運(yùn)動(dòng)技術(shù)原創(chuàng),歡迎大家轉(zhuǎn)載,共同學(xué)習(xí),一起提高中國(guó)智能制造水平。文章版權(quán)歸正運(yùn)動(dòng)技術(shù)所有,如有轉(zhuǎn)載請(qǐng)注明文章來(lái)源。
審核編輯 黃宇
-
數(shù)據(jù)
+關(guān)注
關(guān)注
8文章
7227瀏覽量
90379 -
C++
+關(guān)注
關(guān)注
22文章
2116瀏覽量
74326 -
運(yùn)動(dòng)控制卡
+關(guān)注
關(guān)注
7文章
117瀏覽量
15623
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
運(yùn)動(dòng)控制卡網(wǎng)絡(luò)通訊的心跳檢測(cè)之C#上位機(jī)編程
運(yùn)動(dòng)控制卡周期上報(bào)實(shí)時(shí)數(shù)據(jù)IO狀態(tài)之C++篇 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制卡 #正運(yùn)動(dòng) #運(yùn)動(dòng)控制

運(yùn)動(dòng)控制看的更清楚細(xì)致!RTSys示波器功能簡(jiǎn)介 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制器 #運(yùn)動(dòng)控制系統(tǒng) #運(yùn)動(dòng)控制卡
以太網(wǎng)IO控制卡:C#實(shí)時(shí)讀寫時(shí)間測(cè)試
以太網(wǎng)IO控制卡:C# 實(shí)時(shí)讀寫時(shí)間測(cè)試 #正運(yùn)動(dòng)技術(shù) #運(yùn)動(dòng)控制卡 #正運(yùn)動(dòng) #正運(yùn)動(dòng)控制卡
Piccolo F280049C controlCARD(控制卡)信息指南

實(shí)時(shí)數(shù)據(jù)與數(shù)字孿生的關(guān)系
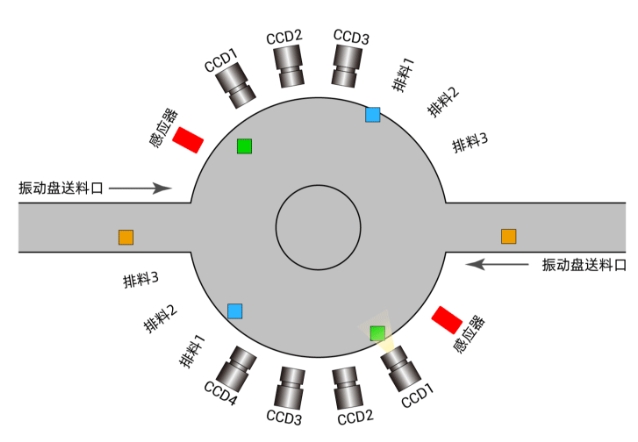
PCIe實(shí)時(shí)運(yùn)動(dòng)控制卡的雙盤視覺篩選機(jī)上位機(jī)開發(fā)應(yīng)用
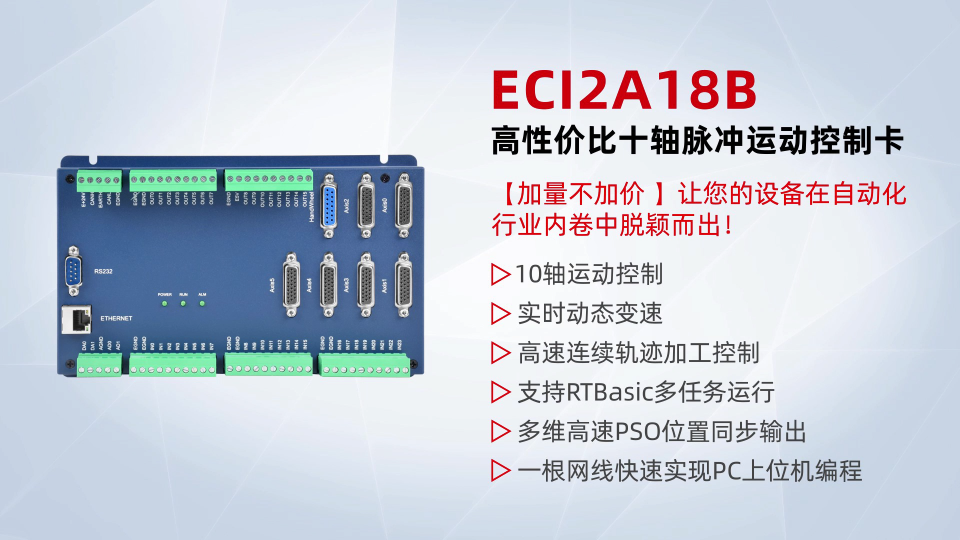
【加量不加價(jià)】高性價(jià)比十軸脈沖運(yùn)動(dòng)控制卡ECI2A18B 讓您的設(shè)備在自動(dòng)化行業(yè)內(nèi)卷中脫穎而出!# 運(yùn)動(dòng)控制卡

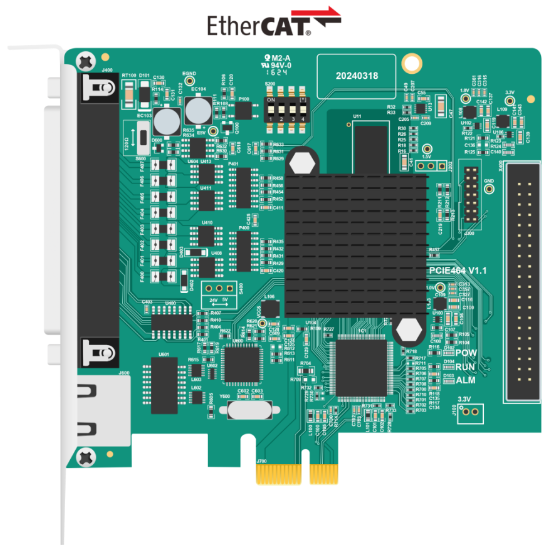
PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡PCIE464的IO與編碼器讀寫應(yīng)用# 正運(yùn)動(dòng)技術(shù)# 運(yùn)動(dòng)控制卡
PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡PCIE464的IO與編碼器讀寫應(yīng)用
mach3控制卡怎樣連接伺服
運(yùn)動(dòng)控制卡伺服電機(jī)如何控制
PCIE464M — 高速高精,超高速PCIe EtherCAT實(shí)時(shí)運(yùn)動(dòng)控制卡
運(yùn)動(dòng)控制卡/運(yùn)動(dòng)控制器的ZCAN總線ZMIO310擴(kuò)展模塊使用






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評(píng)論