") 軟件定義汽車是智能駕駛發(fā)展的關(guān)鍵推動(dòng)力?
軟件定義汽車是智能駕駛發(fā)展的關(guān)鍵推動(dòng)力?
RoboTaxi(自動(dòng)駕駛出租車)作為高級(jí)別自動(dòng)駕駛技術(shù)的主要應(yīng)用場景之一,正在成為軟件定義汽車(Software-Defined Vehicle,SDV)時(shí)代下的重要發(fā)展方向。據(jù)測算,RoboTaxi行業(yè)預(yù)計(jì)在2031年將達(dá)到2.8萬億元市場規(guī)模,其發(fā)展將深刻影響全球共享出行服務(wù)的技術(shù)格局與商業(yè)模式。RoboTaxi的核心優(yōu)勢在于通過L4及更高級(jí)別的自動(dòng)駕駛技術(shù)代替?zhèn)鹘y(tǒng)人工駕駛,以降低人力成本、提高運(yùn)營效率和優(yōu)化用戶體驗(yàn)。然而,RoboTaxi行業(yè)的實(shí)際落地依賴于強(qiáng)大的技術(shù)支持,從感知硬件到?jīng)Q策算法,再到車路協(xié)同和計(jì)算平臺(tái),每個(gè)環(huán)節(jié)都面臨技術(shù)復(fù)雜性與成本優(yōu)化的雙重挑戰(zhàn)。軟件定義汽車的本質(zhì)在于以軟件驅(qū)動(dòng)硬件,形成“數(shù)據(jù)-計(jì)算-迭代”閉環(huán),而RoboTaxi將是這一概念的典型應(yīng)用。RoboTaxi通過整合感知、決策、執(zhí)行等技術(shù)模塊,與自動(dòng)駕駛算法、傳感器及通信平臺(tái)協(xié)同工作,從而應(yīng)對(duì)城市道路復(fù)雜環(huán)境和動(dòng)態(tài)交通流的挑戰(zhàn)。同時(shí),政策法規(guī)的完善與商業(yè)模式的創(chuàng)新也為這一領(lǐng)域的技術(shù)發(fā)展提供了重要推動(dòng)力。
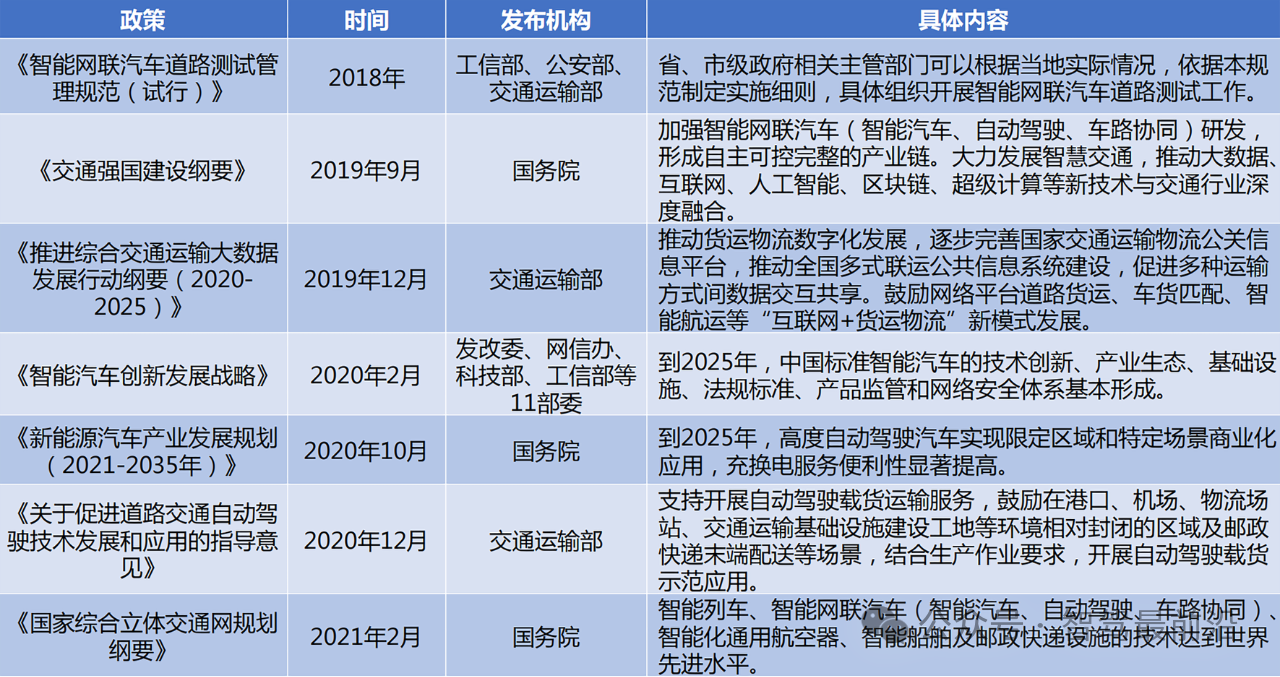
2018-2021年國務(wù)院及各部委關(guān)于自動(dòng)駕駛相關(guān)政策
RoboTaxi的技術(shù)體系架構(gòu)
1.1 感知層技術(shù)
感知層是RoboTaxi實(shí)現(xiàn)環(huán)境理解的基礎(chǔ),其性能直接決定了車輛對(duì)周圍環(huán)境的識(shí)別能力和實(shí)時(shí)反應(yīng)的準(zhǔn)確性。感知層通常包括激光雷達(dá)、攝像頭和毫米波雷達(dá)等多種傳感器,它們通過多模態(tài)數(shù)據(jù)融合實(shí)現(xiàn)對(duì)車輛周圍環(huán)境的全方位感知。不同廠商在感知硬件配置上有所差異。例如,Waymo Driver第五代系統(tǒng)配備了自研激光雷達(dá)(1各車頂+4各車輛前后左右),6個(gè)自研毫米波雷達(dá)、自研29個(gè)攝像頭、麥克風(fēng)陣列等。這種多傳感器配置使車輛能夠在不同天氣和光線條件下實(shí)現(xiàn)高精度目標(biāo)識(shí)別。
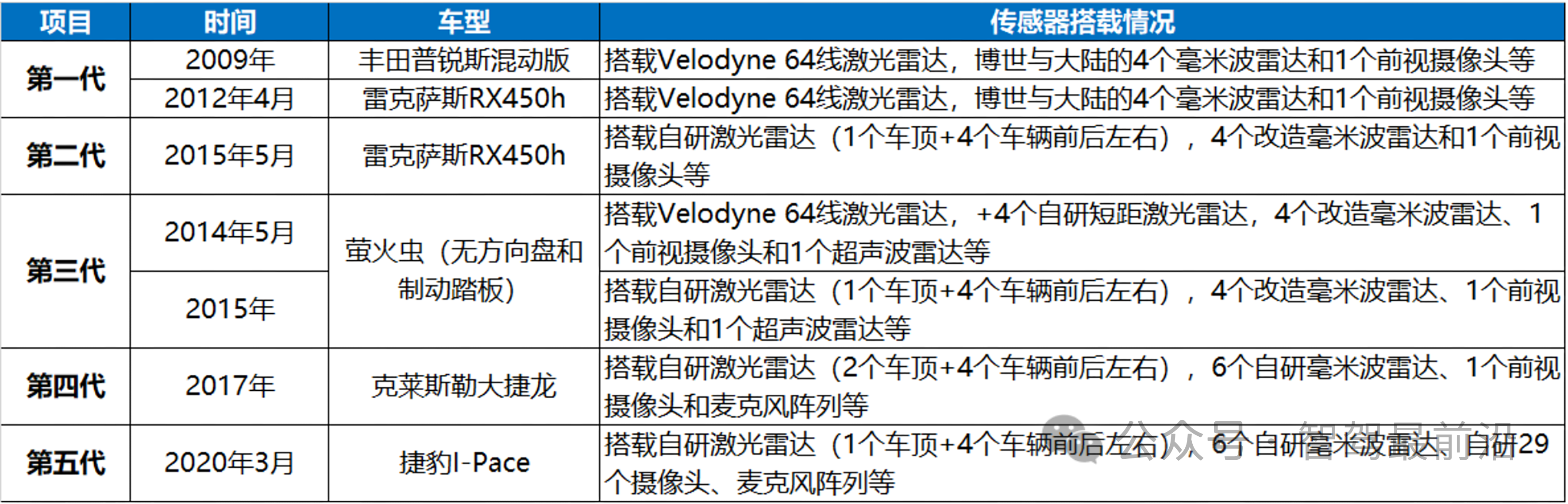
Waymo自動(dòng)駕駛系統(tǒng)演進(jìn)歷程
激光雷達(dá)是當(dāng)前RoboTaxi感知系統(tǒng)的核心設(shè)備,其高分辨率點(diǎn)云數(shù)據(jù)能夠提供厘米級(jí)的環(huán)境信息,是復(fù)雜場景目標(biāo)檢測的關(guān)鍵,但激光雷達(dá)的高成本和耐久性問題依舊是行業(yè)普遍面臨的挑戰(zhàn)。近年來,固態(tài)激光雷達(dá)的研發(fā)逐漸成為主流,其以更低的成本和更高的可靠性,為RoboTaxi的規(guī)模化落地奠定了基礎(chǔ)。例如,百度Apollo Moon通過與禾賽科技合作,成功將激光雷達(dá)的成本降低了50%。與此同時(shí),攝像頭在感知系統(tǒng)中的作用不容忽視。作為最接近人類視覺的傳感器,攝像頭能夠捕捉豐富的顏色、紋理和動(dòng)態(tài)信息,是識(shí)別交通標(biāo)志、信號(hào)燈和車道線的主要設(shè)備。Waymo和百度等廠商的自動(dòng)駕駛系統(tǒng)通常配備多達(dá)10個(gè)以上的攝像頭,以實(shí)現(xiàn)360度無盲區(qū)監(jiān)控。此外,毫米波雷達(dá)以其在惡劣天氣中的優(yōu)異性能,彌補(bǔ)了激光雷達(dá)和攝像頭在雨、霧等復(fù)雜條件下的感知局限性。這三類傳感器的融合,不僅提高了環(huán)境感知的精度和冗余度,也為復(fù)雜場景下的可靠決策提供了數(shù)據(jù)支持。
1.2 決策與規(guī)劃層
在感知數(shù)據(jù)的基礎(chǔ)上,決策與規(guī)劃層負(fù)責(zé)分析動(dòng)態(tài)交通環(huán)境,并生成安全高效的行車路徑。自動(dòng)駕駛系統(tǒng)的決策能力主要依賴于深度學(xué)習(xí)算法和路徑規(guī)劃模型,其目標(biāo)是實(shí)現(xiàn)對(duì)復(fù)雜交通場景的實(shí)時(shí)響應(yīng)與智能調(diào)度。RoboTaxi企業(yè)通常使用MPI(Miles Per Intervention,即每次人工接管間隔里程)作為衡量決策算法成熟度的關(guān)鍵指標(biāo)。例如,Waymo的每次干預(yù)里程數(shù)(MPI)已達(dá)到29945英里,顯著領(lǐng)先于其他廠商。這一指標(biāo)不僅體現(xiàn)了算法的穩(wěn)定性,也直接反映了技術(shù)的商用化水平。路徑規(guī)劃算法是決策層的核心之一。基于高精地圖和實(shí)時(shí)感知數(shù)據(jù),路徑規(guī)劃模塊需要在保證安全的前提下生成最優(yōu)行駛路徑。現(xiàn)階段,大部分企業(yè)采用基于強(qiáng)化學(xué)習(xí)的路徑規(guī)劃模型,通過模擬仿真和真實(shí)路測不斷優(yōu)化算法的適應(yīng)性。此外,復(fù)雜場景下的行為預(yù)測能力也是決策系統(tǒng)的重要組成部分。自動(dòng)駕駛車輛需要實(shí)時(shí)預(yù)測周圍行人、車輛的運(yùn)動(dòng)軌跡,以避免潛在沖突。這一能力在應(yīng)對(duì)城市道路中常見的“長尾問題”時(shí)尤為重要,如行人突然橫穿、非機(jī)動(dòng)車逆行等情況。
1.3 執(zhí)行層技術(shù)
執(zhí)行層是將決策結(jié)果轉(zhuǎn)化為實(shí)際車輛操作的關(guān)鍵環(huán)節(jié),包括加速、制動(dòng)和轉(zhuǎn)向控制等功能。RoboTaxi的執(zhí)行系統(tǒng)通常采用冗余設(shè)計(jì),以確保車輛在出現(xiàn)單點(diǎn)故障時(shí)仍能安全運(yùn)行。例如,特斯拉的制動(dòng)能量回收系統(tǒng)在提升續(xù)航能力的同時(shí),也為復(fù)雜路況下的緊急制動(dòng)提供了額外支持。執(zhí)行層的另一個(gè)關(guān)鍵技術(shù)是底盤控制系統(tǒng)的精準(zhǔn)調(diào)校。自動(dòng)駕駛系統(tǒng)需要與車輛底盤深度集成,以實(shí)現(xiàn)對(duì)轉(zhuǎn)向、懸掛和動(dòng)力系統(tǒng)的精確控制。百度Apollo通過自研計(jì)算平臺(tái)和中間件,實(shí)現(xiàn)了自動(dòng)駕駛系統(tǒng)與底盤控制系統(tǒng)的無縫銜接,使車輛在復(fù)雜環(huán)境中的動(dòng)態(tài)響應(yīng)更加高效。
自動(dòng)駕駛算法的關(guān)鍵突破
2.1 感知算法的核心能力
感知算法是自動(dòng)駕駛系統(tǒng)的技術(shù)核心,通過處理來自多種傳感器的實(shí)時(shí)數(shù)據(jù),生成周圍環(huán)境的三維模型。卷積神經(jīng)網(wǎng)絡(luò)(CNN)是當(dāng)前主流的感知算法,其在目標(biāo)檢測、語義分割等任務(wù)中表現(xiàn)出色。百度Apollo Moon采用了先進(jìn)的多模態(tài)數(shù)據(jù)融合技術(shù),結(jié)合激光雷達(dá)、攝像頭和毫米波雷達(dá)的數(shù)據(jù),實(shí)現(xiàn)了更高精度的目標(biāo)識(shí)別和分類。感知算法的另一個(gè)關(guān)鍵突破在于對(duì)動(dòng)態(tài)環(huán)境的適應(yīng)能力。現(xiàn)代自動(dòng)駕駛系統(tǒng)通過深度學(xué)習(xí)模型不斷更新環(huán)境感知能力,以應(yīng)對(duì)天氣、光線和道路狀況的變化。例如,Waymo Driver利用高分辨率激光雷達(dá)和高清攝像頭,實(shí)現(xiàn)了在夜間和雨霧天氣中的高精度感知。
2.2 決策與規(guī)劃算法
在感知算法的支持下,決策算法通過分析環(huán)境數(shù)據(jù)生成行車策略。強(qiáng)化學(xué)習(xí)是決策算法的核心方法之一,其通過模擬與真實(shí)數(shù)據(jù)的結(jié)合,不斷優(yōu)化模型的行為選擇能力。Waymo的多目標(biāo)優(yōu)化決策模型能在復(fù)雜城市交通中平衡安全性與效率,是行業(yè)領(lǐng)先的解決方案之一。
2.3 仿真與測試技術(shù)
自動(dòng)駕駛算法的開發(fā)離不開全面的仿真與測試。仿真平臺(tái)能夠構(gòu)建虛擬環(huán)境,以較低的成本模擬各種極端駕駛場景,這是驗(yàn)證算法安全性與可靠性的重要工具。RoboTaxi企業(yè)普遍采用仿真與實(shí)際路測相結(jié)合的方法來提升算法適應(yīng)性。例如,百度Apollo利用其自主開發(fā)的仿真平臺(tái),每天生成百萬公里的測試數(shù)據(jù),以快速迭代優(yōu)化算法性能。仿真技術(shù)的核心在于高保真的虛擬環(huán)境和多樣化的場景模擬。自動(dòng)駕駛系統(tǒng)需要測試數(shù)百種甚至數(shù)千種可能發(fā)生的極端場景,如突然停車、行人闖入或交通信號(hào)燈故障。Waymo Driver的仿真系統(tǒng)通過結(jié)合真實(shí)世界的駕駛數(shù)據(jù)和虛擬生成的長尾場景,為自動(dòng)駕駛算法提供了更廣泛的訓(xùn)練數(shù)據(jù)。這種“數(shù)據(jù)驅(qū)動(dòng)”的測試方法顯著提升了車輛在復(fù)雜環(huán)境中的表現(xiàn)能力。此外,物理測試的閉環(huán)仿真能夠?yàn)樽詣?dòng)駕駛車輛的硬件設(shè)計(jì)提供有力支撐,例如傳感器的布局優(yōu)化和計(jì)算平臺(tái)的負(fù)載評(píng)估。
RoboTaxi的通信與協(xié)同技術(shù)
3.1 V2X(車路協(xié)同)在RoboTaxi中的應(yīng)用
車路協(xié)同技術(shù)(V2X)是RoboTaxi實(shí)現(xiàn)安全與高效運(yùn)營的重要支撐。通過車載單元(OBU)與路側(cè)單元(RSU)的實(shí)時(shí)數(shù)據(jù)交互,V2X能夠?yàn)檐囕v提供更全面的環(huán)境感知信息,彌補(bǔ)單車智能的局限性。百度Apollo的車路協(xié)同平臺(tái)已經(jīng)實(shí)現(xiàn)了多場景應(yīng)用,包括紅綠燈識(shí)別、盲區(qū)監(jiān)控以及動(dòng)態(tài)路徑優(yōu)化。V2X的關(guān)鍵作用體現(xiàn)在復(fù)雜城市環(huán)境中。例如,在信號(hào)交叉口,V2X能夠?qū)崟r(shí)向車輛傳遞紅綠燈的狀態(tài)信息,減少誤判的可能性;在視線受阻的情況下,V2X通過路側(cè)傳感器為車輛提供盲區(qū)內(nèi)的動(dòng)態(tài)信息,幫助其提前做出避讓決策。車路協(xié)同技術(shù)在自動(dòng)泊車和智慧公交場景中也有著重要應(yīng)用。自動(dòng)駕駛車輛可通過V2X平臺(tái)與停車場管理系統(tǒng)協(xié)同,實(shí)現(xiàn)車輛的精準(zhǔn)停靠與高效調(diào)度。雖如此,V2X技術(shù)的普及仍面臨基礎(chǔ)設(shè)施建設(shè)成本高和通信標(biāo)準(zhǔn)統(tǒng)一性不足的問題。隨著5G網(wǎng)絡(luò)的部署和低時(shí)延通信技術(shù)的發(fā)展,這些挑戰(zhàn)正逐步得到解決。未來,V2X與單車智能的深度融合將進(jìn)一步提升RoboTaxi的運(yùn)營效率和安全性。
3.2 高精度定位與地圖技術(shù)
高精度定位和地圖是RoboTaxi實(shí)現(xiàn)安全駕駛的另一關(guān)鍵技術(shù)。高精度地圖結(jié)合GPS、IMU(慣性測量單元)和RTK(實(shí)時(shí)動(dòng)態(tài)差分定位)技術(shù),可以為車輛提供厘米級(jí)的定位精度。這一能力在城市道路復(fù)雜環(huán)境中尤為重要,例如高架橋下或隧道中,傳統(tǒng)GPS定位可能存在信號(hào)衰減或多路徑效應(yīng),而高精度地圖能通過與傳感器數(shù)據(jù)的匹配,確保車輛定位的穩(wěn)定性和可靠性。此外,動(dòng)態(tài)高精地圖的實(shí)時(shí)更新機(jī)制也為RoboTaxi的正常運(yùn)營提供了保障。百度Apollo的高精地圖平臺(tái)能夠?qū)崟r(shí)捕捉道路交通的動(dòng)態(tài)變化,例如施工路段、車道封閉等情況,從而為車輛的路徑規(guī)劃提供最實(shí)時(shí)的數(shù)據(jù)支持。高精度定位與地圖的結(jié)合,不僅提高了RoboTaxi的導(dǎo)航精度,也為實(shí)現(xiàn)更高級(jí)別的自動(dòng)駕駛奠定了基礎(chǔ)。
硬件平臺(tái)與計(jì)算架構(gòu)
4.1 感知硬件的集成與創(chuàng)新
感知硬件是RoboTaxi技術(shù)體系中的重要組成部分,其性能對(duì)整個(gè)系統(tǒng)的運(yùn)行效率和安全性有著直接影響。百度Apollo Moon通過采用輕量化傳感器套件和定制化激光雷達(dá),大幅降低了感知硬件的成本。這種設(shè)計(jì)使得Apollo Moon的單車成本僅為48萬元,是行業(yè)平均水平的三分之一。激光雷達(dá)的技術(shù)進(jìn)步是感知硬件領(lǐng)域的重要方向。當(dāng)前,機(jī)械式激光雷達(dá)正逐步被固態(tài)激光雷達(dá)所取代,后者不僅具備更高的可靠性,還能有效降低車輛感知硬件的重量和復(fù)雜度。此外,高分辨率攝像頭在環(huán)境感知中的作用也愈加重要。例如,Waymo Driver的系統(tǒng)采用28個(gè)800萬像素的高清攝像頭,以實(shí)現(xiàn)對(duì)周圍目標(biāo)的細(xì)致捕捉與識(shí)別。多傳感器的集成設(shè)計(jì)是硬件創(chuàng)新的另一個(gè)重要方面。通過激光雷達(dá)、攝像頭和毫米波雷達(dá)的組合,RoboTaxi能夠在復(fù)雜環(huán)境中實(shí)現(xiàn)全方位、多冗余的環(huán)境感知。這種設(shè)計(jì)不僅提升了車輛的安全性,還為未來更高級(jí)別自動(dòng)駕駛系統(tǒng)的開發(fā)提供了技術(shù)儲(chǔ)備。
4.2 自動(dòng)駕駛計(jì)算平臺(tái)
自動(dòng)駕駛計(jì)算平臺(tái)是RoboTaxi實(shí)現(xiàn)實(shí)時(shí)決策與控制的核心,其性能對(duì)算法的運(yùn)行效率和能源消耗有著直接影響。特斯拉自研的FSD(Full Self-Driving)芯片在72 TOPS(每秒萬億次操作)的算力下,能夠支持深度學(xué)習(xí)模型的實(shí)時(shí)推理,從而為高階自動(dòng)駕駛功能提供硬件保障。當(dāng)前,RoboTaxi企業(yè)在計(jì)算平臺(tái)的選擇上主要集中于GPU、FPGA和ASIC芯片三種技術(shù)路徑。GPU因其高并行計(jì)算能力,被廣泛應(yīng)用于感知和決策算法的訓(xùn)練與推理;FPGA以其可編程性和低功耗優(yōu)勢,適合于計(jì)算資源有限的場景;而ASIC作為專用芯片,能夠提供最優(yōu)的算力與能效比,是自動(dòng)駕駛計(jì)算平臺(tái)發(fā)展的未來方向。例如,百度Apollo的自研ACU(車載計(jì)算單元)通過整合SoC芯片與中間件平臺(tái),實(shí)現(xiàn)了自動(dòng)駕駛功能的高效運(yùn)轉(zhuǎn)。計(jì)算平臺(tái)的功耗管理也是關(guān)鍵技術(shù)之一。高算力帶來的高能耗問題對(duì)電動(dòng)車型的續(xù)航能力提出了嚴(yán)峻挑戰(zhàn)。因此,如何在提升算力的同時(shí)優(yōu)化功耗設(shè)計(jì),成為RoboTaxi計(jì)算平臺(tái)研發(fā)的重點(diǎn)方向。
商業(yè)化路徑中的技術(shù)挑戰(zhàn)
5.1 成本優(yōu)化與規(guī)模化部署
當(dāng)前RoboTaxi的自動(dòng)駕駛硬件成本依然較高,但隨著技術(shù)的進(jìn)步與規(guī)模化生產(chǎn)的推動(dòng),這一問題正在逐步改善。Apollo Moon的成本優(yōu)化案例表明,通過對(duì)激光雷達(dá)、攝像頭等核心硬件的技術(shù)革新,RoboTaxi單車成本已顯著降低。這一進(jìn)展為RoboTaxi的大規(guī)模商業(yè)化奠定了基礎(chǔ)。
5.2 安全與冗余設(shè)計(jì)
RoboTaxi的安全性是商業(yè)化落地的核心問題之一。通過多傳感器冗余設(shè)計(jì),系統(tǒng)能夠在單點(diǎn)故障發(fā)生時(shí)保持正常運(yùn)行。例如,滴滴的雙子星硬件平臺(tái)集成了50個(gè)傳感器,并采用了先進(jìn)的容錯(cuò)機(jī)制,以應(yīng)對(duì)各種極端環(huán)境下的安全威脅。此外,網(wǎng)絡(luò)安全與數(shù)據(jù)隱私保護(hù)也是RoboTaxi商業(yè)化的重要挑戰(zhàn)。自動(dòng)駕駛系統(tǒng)在運(yùn)行過程中會(huì)生成大量敏感數(shù)據(jù),這些數(shù)據(jù)的安全存儲(chǔ)與傳輸需要嚴(yán)格的加密與認(rèn)證技術(shù)支持。
國內(nèi)外RoboTaxi技術(shù)路線對(duì)比

國外主流RoboTaxi參與企業(yè)
6.1 Waymo的單車智能技術(shù)優(yōu)勢
Waymo作為全球自動(dòng)駕駛領(lǐng)域的先驅(qū),其技術(shù)路線以單車智能為核心,強(qiáng)調(diào)通過自研硬件與算法構(gòu)建高效的自動(dòng)駕駛系統(tǒng)。Waymo Driver的第五代自動(dòng)駕駛套件配備了多個(gè)高性能激光雷達(dá)、攝像頭和毫米波雷達(dá),實(shí)現(xiàn)了長達(dá)1600英尺的視距覆蓋。這種硬件配置結(jié)合其自研算法,使Waymo能夠在復(fù)雜城市環(huán)境中保持領(lǐng)先的決策與規(guī)劃能力。Waymo的技術(shù)路線具有以下幾個(gè)特點(diǎn):首先,它采用了高精地圖與實(shí)時(shí)感知數(shù)據(jù)相結(jié)合的方式,通過精準(zhǔn)建模和路徑規(guī)劃實(shí)現(xiàn)復(fù)雜場景下的安全駕駛。其次,Waymo依托超過3200萬公里的累計(jì)實(shí)際路測里程,以及320億公里的仿真測試數(shù)據(jù),不斷迭代其自動(dòng)駕駛算法。這種“數(shù)據(jù)驅(qū)動(dòng)+硬件迭代”的模式,使Waymo成為業(yè)內(nèi)公認(rèn)的技術(shù)標(biāo)桿。最后,Waymo在感知硬件的優(yōu)化上投入巨大,例如通過研發(fā)長、中、短三種類型的激光雷達(dá),提升環(huán)境感知的精度與可靠性,同時(shí)大幅降低傳感器的生產(chǎn)成本。
6.2 特斯拉漸進(jìn)式自動(dòng)駕駛路徑分析
特斯拉與Waymo的技術(shù)路線不同,其主要采用從低級(jí)別輔助駕駛逐步進(jìn)化到高級(jí)別自動(dòng)駕駛的漸進(jìn)式路徑。特斯拉的Autopilot系統(tǒng)通過OTA(Over-The-Air)更新不斷迭代功能,而這一能力得益于其數(shù)百萬輛量產(chǎn)車積累的大規(guī)模真實(shí)駕駛數(shù)據(jù)。截至2020年底,特斯拉累積交付了超過135萬輛搭載Autopilot硬件的車輛,累積行駛里程已達(dá)33億英里。特斯拉的核心技術(shù)優(yōu)勢在于其數(shù)據(jù)閉環(huán)體系。相比于Waymo依賴測試車輛的“實(shí)驗(yàn)室模式”,特斯拉通過海量的量產(chǎn)車輛實(shí)時(shí)收集道路數(shù)據(jù),從而支持算法的快速迭代。此外,特斯拉自研的FSD(Full Self-Driving)芯片為其提供了強(qiáng)大的算力支持,使其在無需高精地圖的情況下,能夠通過實(shí)時(shí)感知數(shù)據(jù)完成路徑規(guī)劃和環(huán)境建模。盡管其技術(shù)在實(shí)現(xiàn)完全自動(dòng)駕駛方面尚未達(dá)到L4/L5級(jí)別,但這一漸進(jìn)式路線的經(jīng)濟(jì)性和可擴(kuò)展性使其在商業(yè)化速度上具有優(yōu)勢。
6.3 中國企業(yè)的技術(shù)特色與挑戰(zhàn)
中國企業(yè)在RoboTaxi技術(shù)領(lǐng)域也已形成鮮明特色。百度Apollo、小馬智行、文遠(yuǎn)知行等企業(yè)通過技術(shù)創(chuàng)新和運(yùn)營模式探索,逐步縮小與海外領(lǐng)先企業(yè)的差距。百度Apollo的技術(shù)布局覆蓋自動(dòng)駕駛、智能車聯(lián)和車路協(xié)同三大領(lǐng)域,其自研的ACU(車載計(jì)算單元)和高精地圖平臺(tái)使其具備較強(qiáng)的技術(shù)競爭力。此外,百度通過與地方政府和車企合作,已在多個(gè)城市實(shí)現(xiàn)RoboTaxi的商業(yè)化試運(yùn)營。例如,Apollo Moon通過輕量化硬件設(shè)計(jì)和V2X技術(shù)的協(xié)同應(yīng)用,顯著降低了單車成本,同時(shí)提升了復(fù)雜場景下的決策效率。小馬智行則憑借其在中美市場的雙線布局,成為中國自動(dòng)駕駛領(lǐng)域的后起之秀。其自動(dòng)駕駛系統(tǒng)采用多傳感器融合方案,并搭載Luminar的激光雷達(dá),進(jìn)一步優(yōu)化了城區(qū)復(fù)雜環(huán)境中的感知與規(guī)劃能力。此外,小馬智行通過與豐田、廣汽等主流車企合作,加速了自動(dòng)駕駛量產(chǎn)系統(tǒng)的推廣。文遠(yuǎn)知行的技術(shù)路徑則聚焦于L4級(jí)別的RoboTaxi服務(wù),其核心技術(shù)包括高精地圖、多傳感器融合感知以及自動(dòng)駕駛規(guī)劃與控制算法。文遠(yuǎn)知行在廣州等地的運(yùn)營數(shù)據(jù)顯示,其系統(tǒng)已成功完成超過14萬次無事故的載客服務(wù),展現(xiàn)了較高的技術(shù)穩(wěn)定性和安全性。盡管中國企業(yè)在技術(shù)創(chuàng)新上不斷取得突破,但仍面臨諸多挑戰(zhàn)。例如,復(fù)雜城市環(huán)境中長尾場景的處理能力,以及高精地圖動(dòng)態(tài)更新的技術(shù)難題,仍是行業(yè)發(fā)展的關(guān)鍵瓶頸。同時(shí),國內(nèi)自動(dòng)駕駛企業(yè)在資本投入和數(shù)據(jù)積累上與國際巨頭相比仍有差距,如何提升技術(shù)成熟度和商業(yè)化能力,是未來需要重點(diǎn)解決的問題。
未來技術(shù)趨勢與創(chuàng)新方向
7.1 端到端學(xué)習(xí)系統(tǒng)的應(yīng)用
端到端學(xué)習(xí)(End-to-End Learning)是一種將感知、決策和控制集成到統(tǒng)一神經(jīng)網(wǎng)絡(luò)中的方法,被認(rèn)為是自動(dòng)駕駛技術(shù)的未來方向之一。相比傳統(tǒng)的模塊化系統(tǒng),端到端學(xué)習(xí)通過減少人工規(guī)則干預(yù),實(shí)現(xiàn)了從輸入傳感器數(shù)據(jù)到輸出控制指令的直接映射。百度Apollo和小馬智行正在探索端到端學(xué)習(xí)在長尾場景處理中的潛力。通過大規(guī)模數(shù)據(jù)訓(xùn)練,端到端模型可以顯著提升復(fù)雜環(huán)境下的決策效率和魯棒性。然而,端到端學(xué)習(xí)在自動(dòng)駕駛中的大規(guī)模應(yīng)用仍面臨諸多挑戰(zhàn)。例如,其黑箱特性導(dǎo)致系統(tǒng)缺乏透明性和可解釋性,使得故障排查和優(yōu)化變得更加困難。此外,端到端系統(tǒng)對(duì)訓(xùn)練數(shù)據(jù)的依賴性較高,而高質(zhì)量的標(biāo)注數(shù)據(jù)獲取成本巨大。因此,如何平衡端到端學(xué)習(xí)與模塊化設(shè)計(jì)的優(yōu)缺點(diǎn),將是未來研究的重點(diǎn)方向。
7.2 自動(dòng)駕駛與人工智能芯片的協(xié)同發(fā)展
自動(dòng)駕駛芯片的發(fā)展是推動(dòng)RoboTaxi技術(shù)進(jìn)步的關(guān)鍵動(dòng)力。當(dāng)前主流的計(jì)算芯片路徑包括GPU、FPGA和ASIC。隨著自動(dòng)駕駛系統(tǒng)對(duì)算力需求的不斷提升,AI芯片的協(xié)同優(yōu)化顯得尤為重要。例如,特斯拉的FSD芯片和百度的ACU平臺(tái),通過深度整合硬件與算法,顯著提升了系統(tǒng)的實(shí)時(shí)性和能源效率。未來,AI芯片的研發(fā)方向?qū)⒏泳劢褂诟咝芎谋群彤悩?gòu)計(jì)算能力。通過引入專用加速器(如TPU)和邊緣計(jì)算技術(shù),自動(dòng)駕駛系統(tǒng)能夠更高效地處理復(fù)雜任務(wù),同時(shí)減少對(duì)云計(jì)算資源的依賴。此外,AI芯片的模塊化設(shè)計(jì)也將為系統(tǒng)的可擴(kuò)展性提供更多可能。
7.3 數(shù)據(jù)驅(qū)動(dòng)的長尾場景優(yōu)化
長尾場景一直是自動(dòng)駕駛技術(shù)的難點(diǎn)。RoboTaxi企業(yè)普遍采用數(shù)據(jù)驅(qū)動(dòng)的方法,通過挖掘真實(shí)道路數(shù)據(jù)中的極端案例,提升算法對(duì)邊緣情況的處理能力。例如,Waymo的仿真系統(tǒng)能夠生成大量罕見場景數(shù)據(jù),從而彌補(bǔ)實(shí)際路測中難以覆蓋的測試盲區(qū)。聯(lián)邦學(xué)習(xí)技術(shù)的引入為長尾場景優(yōu)化提供了新的可能性。通過在分布式設(shè)備上共享模型而非原始數(shù)據(jù),聯(lián)邦學(xué)習(xí)能夠在保護(hù)數(shù)據(jù)隱私的前提下,充分利用多樣化的駕駛數(shù)據(jù)。這種技術(shù)將有助于企業(yè)在全球范圍內(nèi)構(gòu)建更加魯棒的算法模型。
結(jié)論
RoboTaxi作為軟件定義汽車的重要應(yīng)用場景,其發(fā)展路徑充分體現(xiàn)了自動(dòng)駕駛技術(shù)的復(fù)雜性與多樣性。從感知硬件到算法優(yōu)化,從通信技術(shù)到計(jì)算平臺(tái),每個(gè)環(huán)節(jié)都在不斷推動(dòng)行業(yè)前進(jìn)。盡管RoboTaxi的商業(yè)化仍處于早期階段,但隨著成本優(yōu)化和技術(shù)突破,其市場前景無疑廣闊。未來,RoboTaxi的技術(shù)發(fā)展將更加注重軟硬件協(xié)同以及數(shù)據(jù)驅(qū)動(dòng)的持續(xù)優(yōu)化。同時(shí),政策法規(guī)的完善和行業(yè)標(biāo)準(zhǔn)的制定,也將為其商業(yè)化落地提供重要支撐。作為未來智能交通的重要組成部分,RoboTaxi有望引領(lǐng)全球出行服務(wù)模式的深刻變革,為智慧城市建設(shè)和可持續(xù)發(fā)展注入新的動(dòng)力。
審核編輯 黃宇
-
智能駕駛
+關(guān)注
關(guān)注
3文章
2520瀏覽量
48760 -
激光雷達(dá)
+關(guān)注
關(guān)注
968文章
3972瀏覽量
189918 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13812瀏覽量
166448 -
自動(dòng)駕駛技術(shù)
+關(guān)注
關(guān)注
4文章
97瀏覽量
15000
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
Sonatus與Smarteye合作加速軟件定義汽車創(chuàng)新
智能座艙與智能駕駛技術(shù)演進(jìn)分析

智能駕駛加速軟件定義汽車步伐?
導(dǎo)遠(yuǎn)科技與零跑汽車推動(dòng)智能駕駛發(fā)展
華為智能駕駛發(fā)展路徑探討

網(wǎng)關(guān)與IO模塊:產(chǎn)業(yè)數(shù)字化與智能化的關(guān)鍵推動(dòng)力

Arbe推出軟件定義雷達(dá)架構(gòu),推動(dòng)駕駛輔助和自動(dòng)駕駛快速發(fā)展
英特爾發(fā)力中國智能座艙市場,攜手本地伙伴打造軟件定義汽車新體驗(yàn)
卓馭科技與高通合作宣布進(jìn)一步推動(dòng)汽車行業(yè)智能駕駛技術(shù)的發(fā)展

關(guān)于軟件定義汽車,麥格納怎么看
鴻道Intewell新型操作系統(tǒng)為國產(chǎn)智能汽車發(fā)展提供基礎(chǔ)軟件平臺(tái)替代方案
【換道賽車:新能源汽車的中國道路 | 閱讀體驗(yàn)】1.汽車產(chǎn)業(yè)大變局
汽車激光雷達(dá):競爭格局和技術(shù)演進(jìn)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論