 CanOpen轉Profinet總線協議轉換網關模塊連接步科電機的配置方法
CanOpen轉Profinet總線協議轉換網關模塊連接步科電機的配置方法
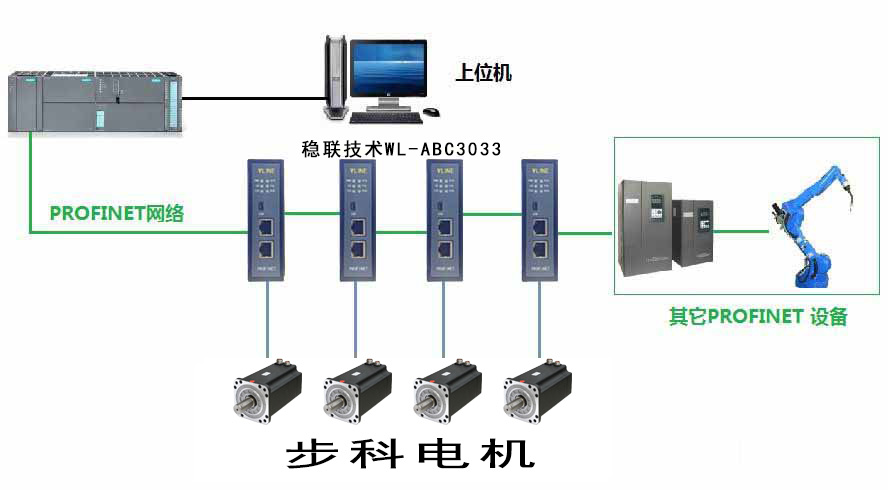
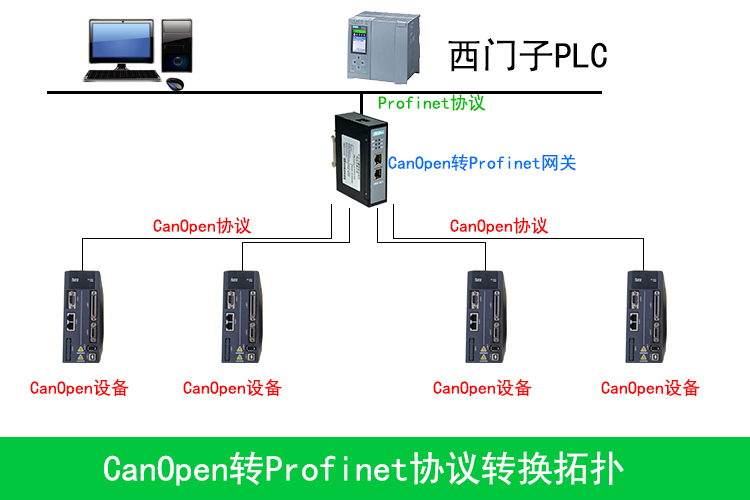
客戶現場要求通過Profinet轉CanOpen總線協議轉換網關模塊連接到西門子PLC對步科電機進行讀寫。原本不相同的兩個協議怎么連接是一個值得關注的問題,現在可以通過捷米特JM-PN-COP網關進行連接,CANOPEN 是一種完全開放和公共的現場總線協議。它以 CAN 芯片為基礎硬件,制定的面向工業自動化過程的應用層通訊協議。

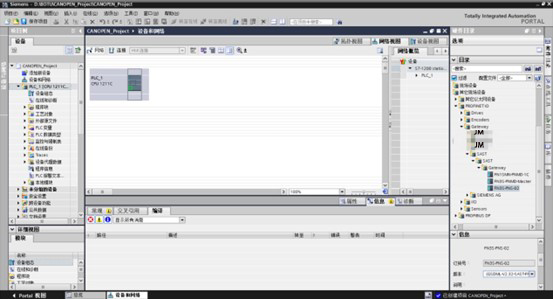
1, 在博途中通過導入的方法添加網關的 GSD 文件。在“設備和網絡”中添加網關,
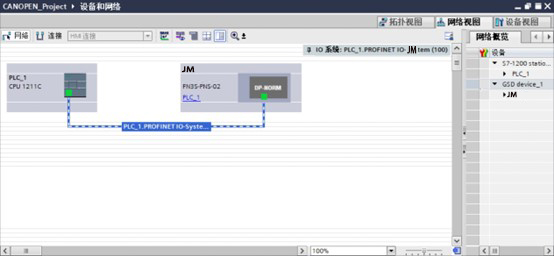
2, 把網關和PLC連接起來,可以通過plc給網關自動分配IO地址
3, 雙擊網關的圖標,進入設備視圖,設置網關的 IP 地址、子網掩碼、設備名稱。

配置讀寫數據,根據 CANOPEN 的通訊數據多少,進行 PLC 輸入輸出長度設置,
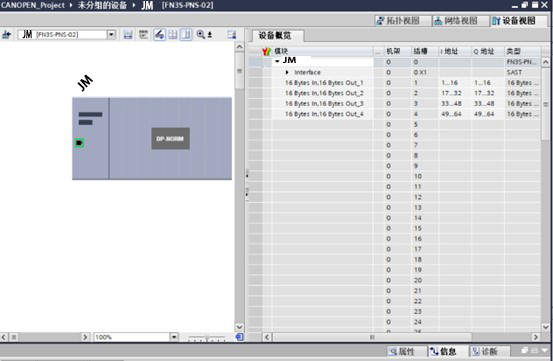
將程序編譯下載,PLC側的數據已經配置完畢
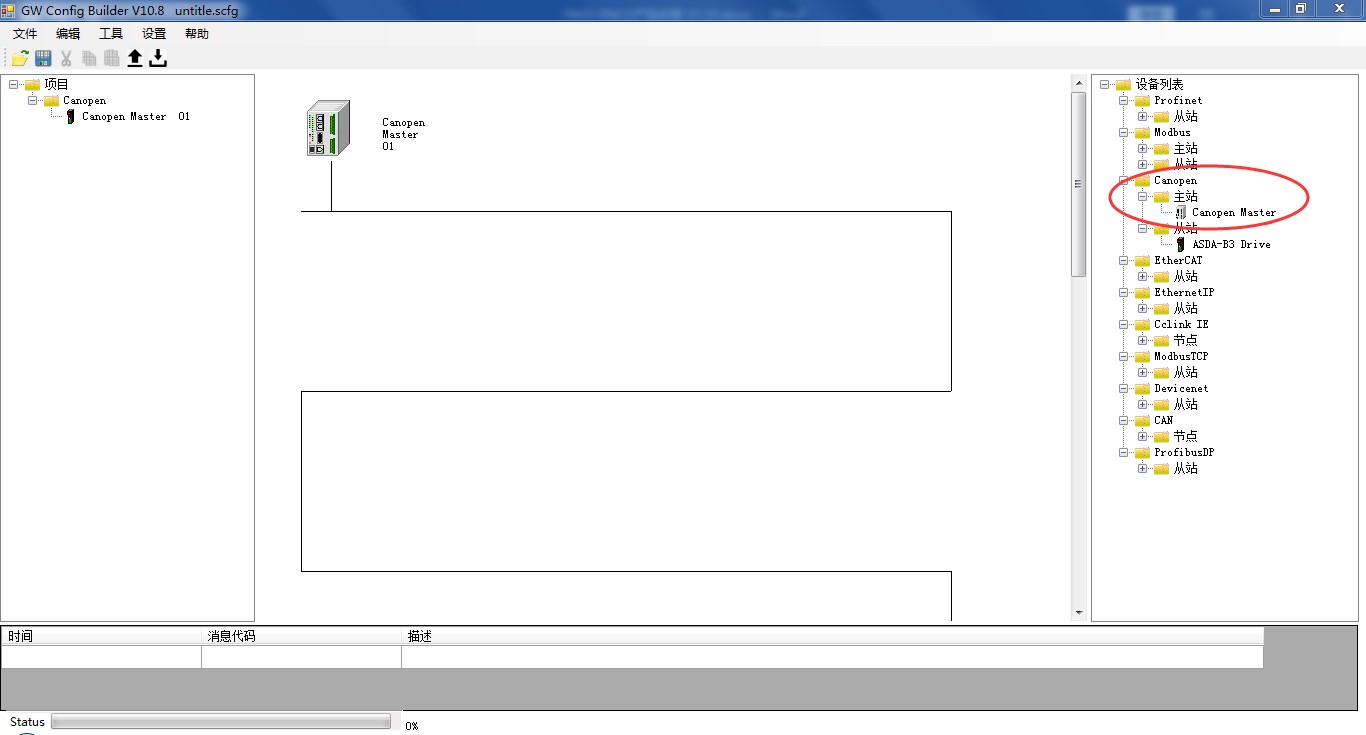
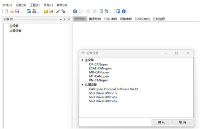
使用 GW Config Builder 軟件進行網關的 CANOPEN 配置,首先添加一個 CANOPEN 主站,如下圖:
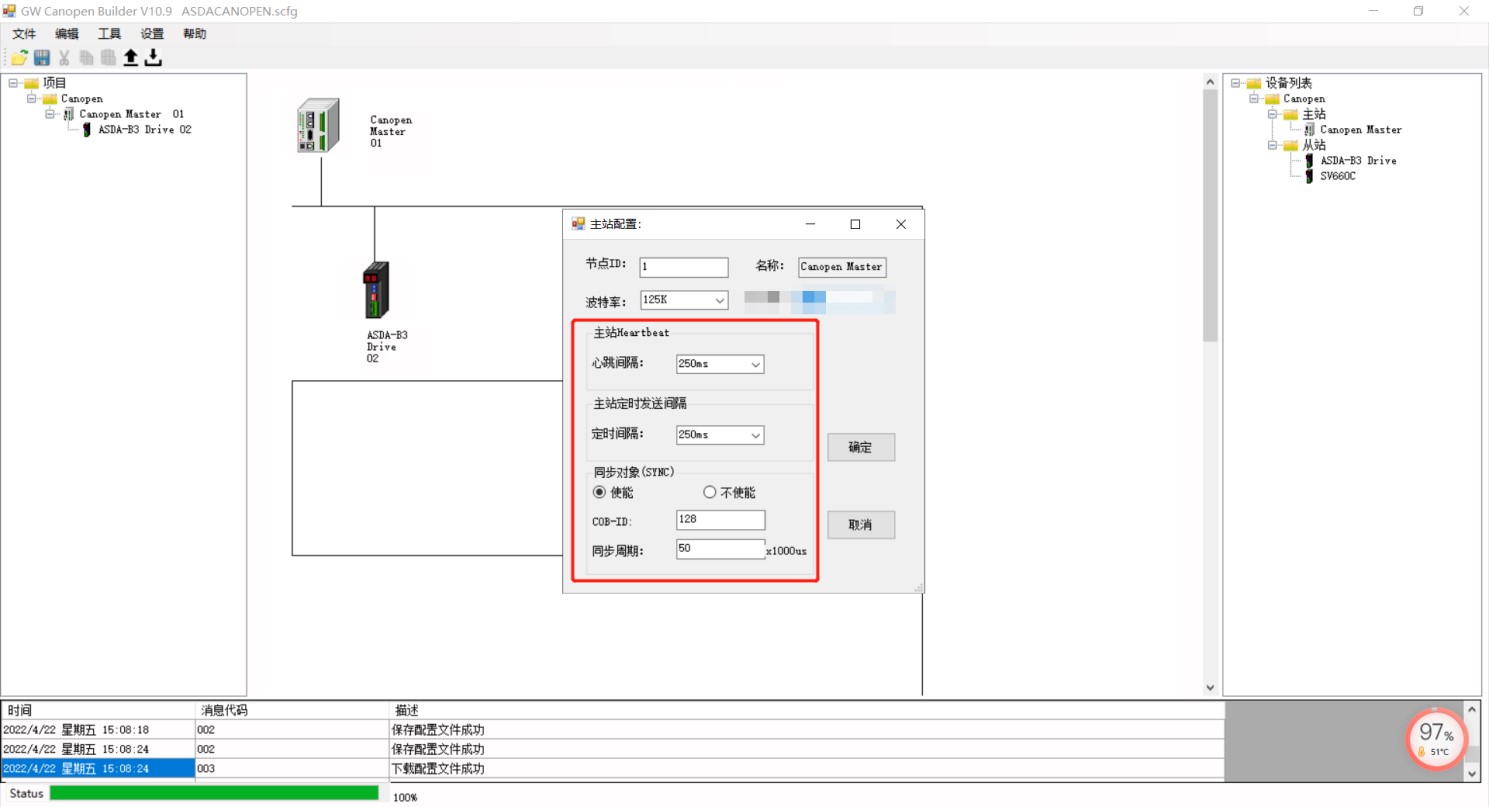
4, 右鍵單擊主站圖標,選擇屬性頁面,設置主站波特率、定時發送間隔和主站心跳時間。
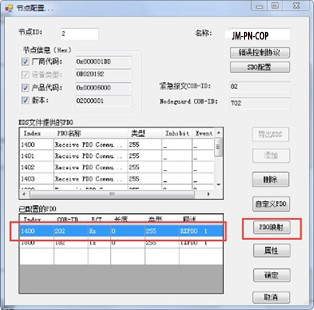
雙擊捷米特JM-COP-PN從站的圖標,配置該從站的參數。選中 RXPDO(1400),點擊“PDO 映射”按鈕
根據需求選擇需要映射的參數,以添加 6040“控制字” 、6060 “運行模式”為例,選擇添加上 6040 或 6060(每次只能添加 1 個對象)
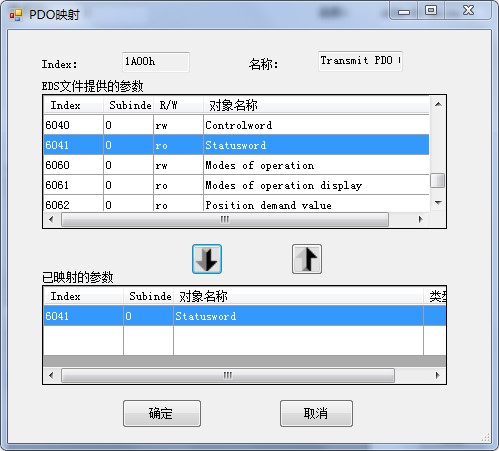
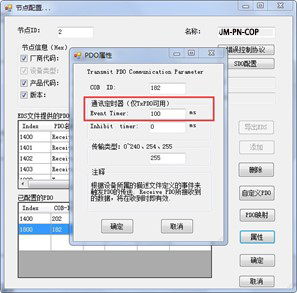
選中 TXPDO(1800),點擊“PDO 映射”按鈕 如下圖所示,以添加 6041“狀態字”為例,在彈出的對話框中,選擇 6041,然后點確定。
5, 輸入 TXPDO 定時發送時間,例如 100ms, 同時將傳輸類型改為 255。如果使能SYNC功能,修改類型為“1~240”(該類型要根據實際情況選擇,連接多臺從站時,建議類型 10),點擊確定。
通過這一系列的設置可以通過西門子PLC去讀取步科電機的數據,并控制電機。
在工業自動化場景中,步科電機采用 CanOpen 協議,而系統中的其他設備(如西門子 PLC)可能基于 Profinet 協議進行通信。通過使用捷米特JM-PN-COP網關,成功搭建了兩者之間的橋梁,打破了協議壁壘,使得原本無法直接通信的設備得以實現數據交互和協同工作。這一解決方案避免了企業因協議不兼容而對設備進行大規模更換的高額成本,同時保護了已有設備的投資,提高了設備的利用率和系統的靈活性。
審核編輯 黃宇
-
物聯網
+關注
關注
2910文章
44781瀏覽量
374768 -
CANopen
+關注
關注
8文章
267瀏覽量
43618 -
Profinet
+關注
關注
6文章
1202瀏覽量
23471 -
轉換網關
+關注
關注
0文章
61瀏覽量
6012
發布評論請先 登錄
相關推薦
小疆智控CANOpen轉PROFINET網關連接EA180C CANOPEN總線型伺服配置案例
Profinet協議轉換為CanOpen協議來連接CanOpen伺服驅動器的應用
捷米特PROFINET轉 CANOPEN總線網關連接匯川變頻器解決方案
profinet轉canopen網關連接施耐德變頻器配置案例
配置案例丨Profinet轉Canopen網關連接施耐德變頻器
Profinet轉canopen連接磁軌道
配置案例丨Profinet轉Canopen網關連接SINEE變頻器
Profinet轉Canopen網關連接AGV電池配置案例

Profinet轉Canopen網關連接施耐德變頻器
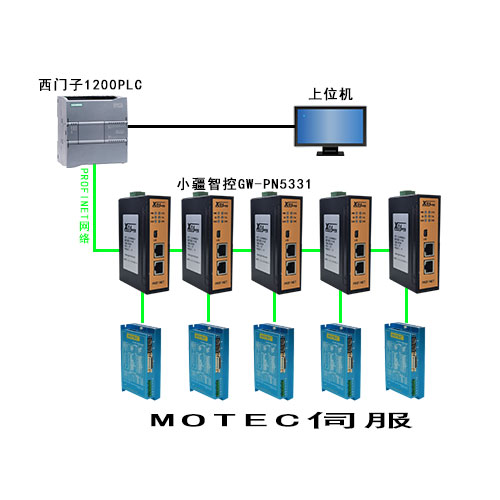
Profinet轉Canopen網關連接MOTEC伺服配置案例
Profinet轉CANopen協議轉換網關基本應用







 工商網監
工商網監
評論