 CES新物種(下):中國原創,世界領先——通用軟體機器人技術賦能全球生產力
CES新物種(下):中國原創,世界領先——通用軟體機器人技術賦能全球生產力
在CES的舞臺上,各式各樣、功能各異的機器人已不鮮見。然而,無論是教育類玩具機器人,物流或導盲機器人,還是家用掃地機器人,或當前火熱的人形機器人,從其技術范式來看,都可以歸為同一類,即“剛性”機器人——采用了剛性材料、電機關節和各類復雜傳感器。雖然目前剛性機器人的應用已很常見,但也只覆蓋了千行百業豐富場景的冰山一角,想要真正融入人類社會生活,服務更多行業和場景,仍需克服在適應性、安全互動和成本等方面的挑戰。
而與之對應的則是“軟體”機器人——采用軟性材料,以氣/液體驅動,輕巧靈活、安全互動、易于變形,更適合與人和作業環境存在大量交互的復雜多變場景。作為一項前沿科技,軟體機器人現階段更多存在于實驗室研發場景中,如軟體魚、蛇、蠕蟲等形態的機器人,鮮有出現在人類生活中。在CES 2025大展上,多款已商用推廣的軟體機器人重磅亮相,為世界了解這一全新“物種”提供窗口。

CES2025展會現場 萬勛科技展示的通用軟體機器人受到廣泛關注
走進人類生活
軟體機器人的“最后一公里”
長久以來,作為新時代生產力的革命性突破力量,機器人的研發與應用普遍在重點追求精度和速度,以充分幫助人類提高生產力。而這也就要求機器人必須具備精準設計的剛性結構,才能具備“快而準”的作業能力。同時,這也使得它們的身體無法變形,難以實現與環境很好的交互,安全性低,應用范圍受限。
然而,隨著各行業、各應用場景需求的不斷擴大,這種傳統“剛性機器人技術”的應用局限便愈發凸顯。為實現機器人的多場景、規模化應用,近年來,業內開始積極探索嘗試更多創新技術路線。其中,軟體機器人技術尤為突出、發展迅速。
軟體機器人技術的起源似乎可以追溯到20世紀80年代,日本岡山大學的機器人實驗室制造了一種硅膠軟體機械手,可以完成易碎物品的基本夾取動作,而隨著材料、制作、驅動控制等核心技術的進步,軟體機器人技術自20世紀90年代開始加速探索。新型高分子材料的突破,為軟體機器人性能的提升提供了良好的材料基礎。同時,3D打印技術的出現也為軟體機器人的生產制造帶來變革,能夠快速、準確地制造出復雜的軟體機器人結構,大大推動了軟體機器人的“進化”。這一時期,在哈佛大學的科研突破下,軟體機器人技術被一步步推向前沿熱點,并基本奠定了發展路線。
2010年,哈佛大學研發出一種有四只“腳”的小型軟體機器人,可以像蠕蟲一樣在非常狹窄的空間里進行活動,并準確抓取各類產品。這是世界上首個多足軟體機器人,引起巨大關注。2016年,哈佛大學團隊研發的軟體機器人Octobot再次引發轟動,成為世界上首個公認的全軟體機器人,其基體由3D打印技術制造而成,通過化學反應提供所需動力,采用流體驅動的行進方式,無需電力便可自主運動,為軟體機器人的發展帶來了跨時代的突破。
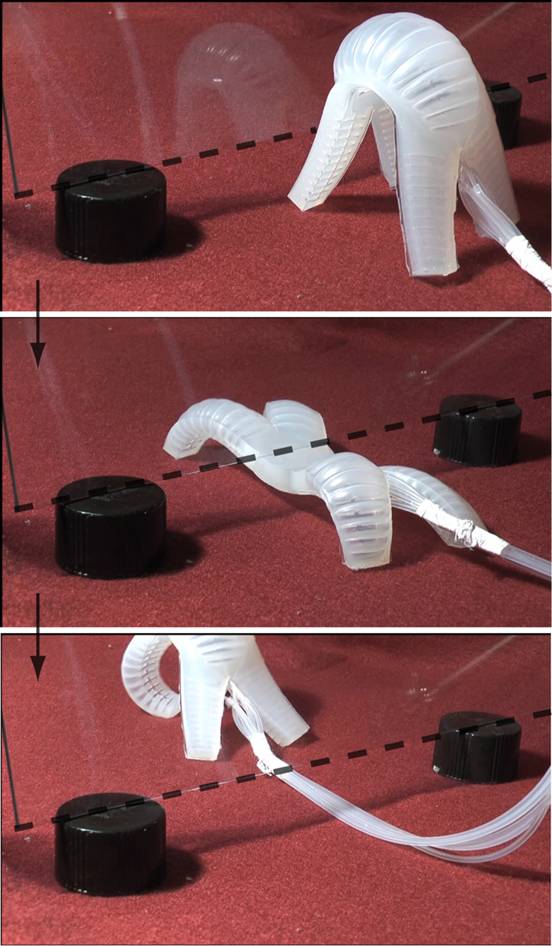
世界上首個多足軟體機器人,可以通過變形穿越復雜空間 | 圖片來源:Harvard magazine
現如今,軟體機器人技術的發展已經進入快車道,吸引了全球諸多學術機構和企業積極探索,推出一系列研發成果,并逐漸突破傳統剛性機器人的局限,開辟新的機器人應用場景和功能模式。
憑借流體驅動、材料科學等技術創新,軟體機器人具備成本低、輕巧靈活、安全互動、易于變形等優點,能夠克服傳統剛性機器人不夠安全、適用性低、成本高等缺陷,更適合與人和環境大量互動的復雜多變場景,具備面向更多行業的應用潛力,為機器人的大規模應用帶來可能。
而隨著技術與產品的成熟,軟體機器人也開始逐步探索商業化進程,但總體進展緩慢,一些重大的技術突破仍停留在實驗階段,尚不能真正實現落地。全球也僅有少數幾家公司實現了產品的產業級應用,并局限于醫療、工業等特定場景,且產品形態單一,多為夾爪、導管等。
本質上,軟體機器人的出現是想讓機器人更加柔軟,突破剛性機器人“太硬”的局限,適應更多作業場景。但反過來,當機器人能夠成功變軟后,卻又因為“太軟”而面臨其他的難題——由于自身的柔軟特性,軟體機器人的控制精度和承載能力遠不如傳統的剛性機器人,導致作業能力有限。而很長一段時間內,受限于材料、驅動、控制等技術的成熟度,全球范圍內都難以攻克這一難題。這也正是一直以來軟體機器人無法大規模落地應用的重要原因。
Pliabot?柔韌技術
讓軟體機器人“剛柔并濟”
近年來,在新型高分子材料不斷突破,制造與驅動技術也更加精確與多樣化的驅動下,加上強化學習、神經網絡等多種高級算法的應用,軟體機器人的研發開始進一步創新升級,適應性、作業能力與智能化程度開始迎來新的突破。
以軟體機器人技術的商業化和廣泛應用為突破路徑,萬勛科技在全球首創了Pliabot?柔韌技術,為軟體機器人,乃至剛性機器人的大規模普及應用提供了顛覆性的全新技術路線。
基于Pliabot?柔韌技術打造的軟體機器人,具備“類人肌體,過人能力”的獨特性能——通過軟材料仿生肌肉和神經元智能復刻人類肌肉的柔韌特性,以氣壓/液壓驅動,結合小腦智能、大腦智能和云端智能,實現機器人本體和智能系統的全棧創新,既保留了軟體機器人高適應性、安全互動、低成本的優點,又彌補了作業能力的短板,獲得遠超剛性機器人的負重比,更獲得了比人類更強的耐久作業與靈活作業能力,具備高環境抗性、高負重比、低成本、任務泛化性、安全性五大核心優勢,更加貼合人類作業環境。

這其中,“類人肌體”是突破傳統純軟機器人技術局限的關鍵——如前文所述,純軟體機器人,由于軟材料自身剛度低,在實際進行作業時很難控制自身的運動穩定性,以及輸出有力的大負載,作業能力有限。相比之下,Pliabot?柔韌機器人技術參考人類肌體,以剛柔融合的方式給軟體機器人加入“骨骼”和“脊梁”,讓它們既能在開展作業時 “挺起腰板”,又能依靠柔韌性提供靈活性與安全保障,達到“多剛一分則魯莽,多柔一分則儒弱”的平衡佳境。靠著一副天生好骨骼,滿足多樣化的作業需求。換句話說,Pliabot?柔韌技術讓軟體機器人在保證柔軟的前提下,又大大提高了作業能力。
事實上,Pliabot?柔韌技術由軟體機器人技術派生發展而來,其淵源可追溯到哈佛大學研發的世界首個多足軟體機器人,但又經過了充分的延伸發展和本土化的原創。萬勛科技研發團隊的核心人員,也來自哈佛大學、慕尼黑工大、香港大學、清華大學等頂尖高校,深耕軟體機器人領域十余年,深度參與了世界首個3D打印旋轉肌肉、世界首個剛柔耦合夾爪、世界首個全自由度軟體仿生手、世界首個智能軟體關節、世界首個深海作業仿生軟體機器手臂等重大科研成果的研發,擁有深厚的國際化學術背景與研發經驗,是全球軟體機器人和智能柔性控制技術的重要推動者,深度參與和推動了軟體機器人技術的理論奠基、技術孵化和產業應用落地。
依托深耕軟體機器人核心技術十余年的深厚積累與創新,萬勛科技研發團隊持續聚焦關鍵核心技術研發迭代,已構筑起Pliabot?柔韌技術“長技術棧,短供應鏈”的競爭優勢,通過融合仿生學原理、 高分子新材料、機械結構設計、硬件與嵌入式算法、機器人控制與多模態信息融合、分布式具身智能等底層長鏈條創新,構筑了多學科融合交叉的多層級技術壁壘,突破了軟體機器人單個部件、單個技術的分散式創新。截至目前,公司已累計申請數百項知識產權,其中200余項已授權,并領銜制定了軟體機器人領域的多項技術標準,有效確保了核心技術的稀缺性,引領全球軟體機器人技術的創新探索邁出里程碑式的一步。
賦能全球千行百業
Pliabot?柔韌機器人商業化加速
為更好地推動軟體機器人技術的快速應用,面向更多行業和場景發揮通用化價值,Pliabot?柔韌技術以模塊化開發平臺,復用標準模組,開發出柔韌肌肉、柔韌關節、柔韌單臂、柔韌雙臂、柔韌本體系統等多形態靈活應用,可組合各類末端執行工具及移動底盤、升降機、流水線、可穿戴設備、無人飛行器乃至機器狗、人形機器人等不同載具平臺,在兼顧機器人未來形態長期演進的同時,能更加靈活地滿足高空作業、新能源智駕、工業制造、商業服務、家庭服務等不同領域、行業和場景的實用性與規模應用需求,具備極強的通用性和商業化能力。
基于Pliabot? 柔韌技術,萬勛科技已推出兩大產品系列,分別是將軟體機器人與無人機結合的獵戶座系列空中柔韌機器人,以及將軟體機器人與自動駕駛結合的麒麟座自動充電機器人,廣泛應用于高空清潔、智駕充電、能源運維、應急救援、環境保護等十余個不同行業的豐富作業場景。
在Pliabot?柔韌技術的加持下,獵戶座系列空中柔韌機器人創造性地將柔韌臂、柔韌關節與大疆無人機深度整合,原生適配其輕載/重載多系列機型,已發展出空中精準作業、柔韌噴灑、主動釋放和接觸式檢測四大產品線,可跨行業、跨場景使用,為高空清潔、能源運維等諸多行業提質、降本、增效,更助力低空經濟蓬勃發展。

比如AP3-P3柔韌系留清洗系統,在柔韌云臺的助力下,可實現自適應平衡、柔韌緩沖碰撞及多角度靈活調整,具備全域安全、抵近作業等獨特優勢,可用于大廈外墻、高塔等高空清潔場景,大幅提升傳統人工作業效率,并保證作業人員安全;AP30-N1空中柔韌作業平臺,在無人機平臺上搭載了可大范圍伸縮、多角度靈活轉向的柔韌臂,自重輕、負載大,可保證交互安全,具備空中精準抓取、放置、采樣等功能,讓傳統無人機具備了精準作業能力與環境適應能力,滿足多元化及高危空中作業需求。
而麒麟座柔韌自動充電機器人,基于新一代柔韌仿生肌肉技術,充分模擬人類手臂柔性動作與交互特性,具備顛覆式性能與成本優勢,并以強大的多環境、多場景適應性實現全域通用,目前商業化進展持續加速,為行業提供了具備規模商用優勢的完整自動充電解決方案,助力智駕體驗升級,更為新能源汽車產業蓬勃發展提供新動能。

目前,萬勛科技已實現柔韌機器人核心部件全球最早量產出貨,系列產品服務了全球100多個國家、地區和城市的客戶,建立了廣闊的海內外渠道與客戶網絡。在推廣并拓展現有產品和解決方案、讓全球更多地區客戶體驗Pliabot?柔韌機器人的同時,公司也將持續進行技術和產品迭代,延伸服務能力,與更多行業和客戶一起探索并落地新的應用場景,為世界打造新質生產力。
此外,萬勛科技也將持續加大核心技術攻關,基于Pliabot?柔韌技術獨特優勢,積極開拓更多新的產品線,探索與通用人形機器人、工業專用機器人、家庭服務機器人等多形態、多功能機器人的融合,幫助機器人解鎖“十八般武藝”,為各行業打造低成本、高適應性的創新型機器人服務解決方案,加速機器人時代到來。
審核編輯 黃宇
-
機器人
+關注
關注
211文章
28552瀏覽量
207649 -
CES
+關注
關注
4文章
1117瀏覽量
70839
發布評論請先 登錄
相關推薦
頭部企業共話機器人產業新質生產力
燧原科技入選先進計算賦能新質生產力典型應用案例
高壓放大器在水下撲翼軟體機器人研究中的應用


華為云徐峰:AI 賦能應用現代化,加速軟件生產力躍升

聚焦培育新質生產力,小笨智能深耕服務機器人賽道
機械革命入選《2024全國企業新質生產力賦能典型案例》
加速生產數據向AI機器人轉化,剖析NVIDIA機器人堆棧式資源
工業機器人加速推動“新質生產力” ,穩石機器人助力打造企業高質量發展新引擎






 工商網監
工商網監
評論