 比例諧振(PR)控制器的學習過程記錄
比例諧振(PR)控制器的學習過程記錄
0、前言
在一個閉環控制系統中,可分為輸入參考值、閉環控制器、執行機構、輸出參數,反饋系數,這幾個部分。
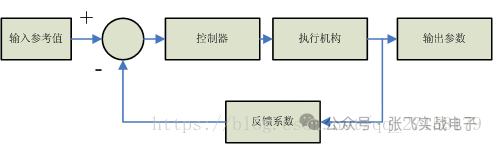
設計一款控制器,可以讓系統的輸出參數跟蹤輸入參考值,達到了控制的目的。在直流控制系統中,常用的控制器就是比例微分積分(Proportion Integration Differentiation,PID)控制器了。然而,在交流系統中,PID控制器由于對高頻信號的跟蹤性能較差,并不能滿足設計要求。而PR控制器,對特定頻率信號的跟蹤效果是良好的。
?
本文首先對PR控制器和PI控制器進行對比。然后討論了比例諧振(Proportion, Resonant, PR)控制器的數字化實現。筆者目前在一款DCDC電路中使用過PI控制器,同時PI控制器的資料比較好找。然而PR控制器只在軟件仿真中使用過,并沒有在實際項目中使用。
希望我和讀者們,都能從本文中獲益,謝謝。
1、PR控制器和PI控制器對比
1.1 傳遞函數表達式對比
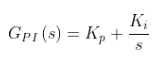
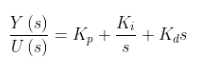
比例積分控制器的傳遞函數如下:
比例諧振控制器的傳遞函數如下:
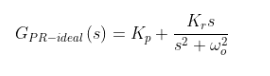
本文稱這個PR控制器為理想的PR控制器。
以上的這個控制器,在下文的波特圖上可見,只對單一的頻率起作用。但實際上,例如逆變器,參考波形可能在頻率上有正負1Hz的變化,或者由于測量采樣的不確定性,因此在運用中,會用以下的變形,替代上面的Gpr-ideal。
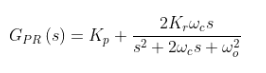
本文稱這個PR控制器為實際的PR控制器。
1.2 波特圖對比
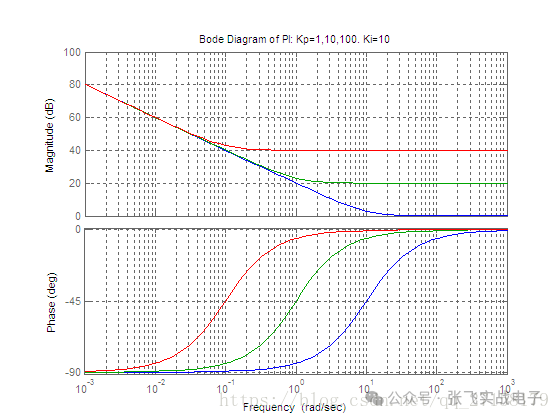
下圖是當Kp分別取為1、10、100,Ki=10時PI控制器的波特圖(藍色是Kp=1,綠色是Kp=10,紅色是Kp=100)。
附上實現代碼:
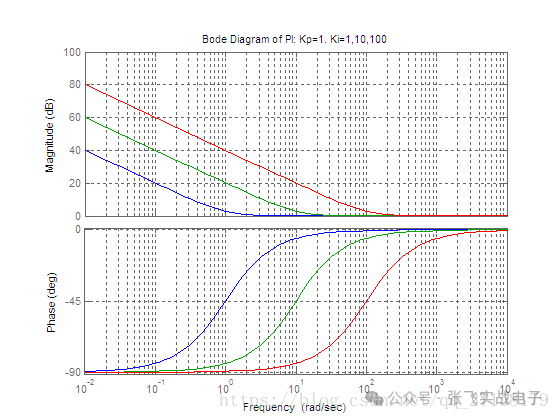
下圖是當Kp=1,Ki分別取為1、10、100時PI控制器的波特圖(藍色是Ki=1,綠色是Ki=10,紅色是Ki=100)。
附上實現代碼:
可以看到,PI控制器對高頻信號的增益會較低,而對低頻信號會有較大的放大作用。假如使用PI控制器對50Hz及以上(角頻率314rad/sec)的正弦波進行跟蹤,系統的跟蹤特性會較差。而且會把低頻噪聲放大。
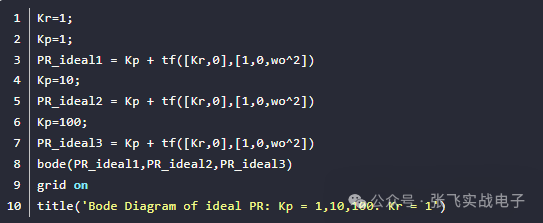
下圖是當Kp分別取為1、10、100,Kr=1時理想的PR控制器的波特圖(藍色是Kp=1,綠色是Kp=10,紅色是Kp=100)。
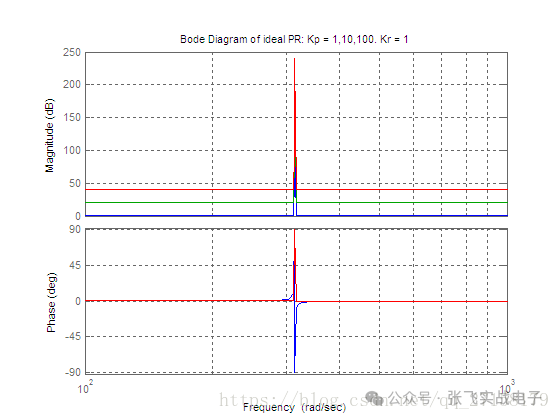
附實現代碼
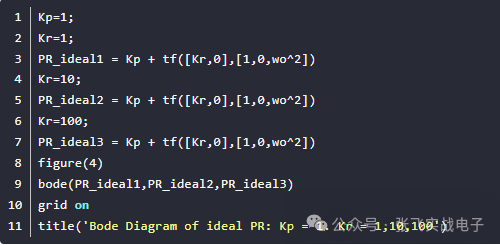
下圖是當Kp=1,Kr分別取為1、10、100時理想的PR控制器的波特圖(藍色是Kr=1,綠色是Kr=10,紅色是Kr=100)。
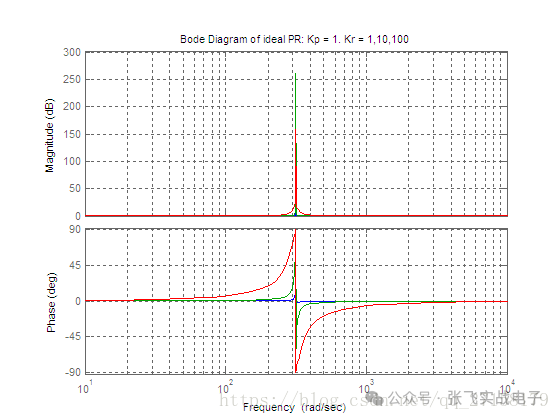
附實現代碼
上面理想PR的波特圖,可以看到就算調整PR的參數,波形也沒什么大的變化。在實際使用中,可能進行實時調參的。圖像變化這么小,跟蹤效果也不會好。
接下來看看實際使用的PR控制器的波特圖。
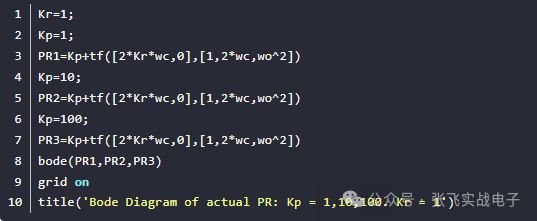
下圖是當Kp分別取為1、10、100,Kr=1時實際的PR控制器的波特圖(藍色是Kp=1,綠色是Kp=10,紅色是Kp=100)。
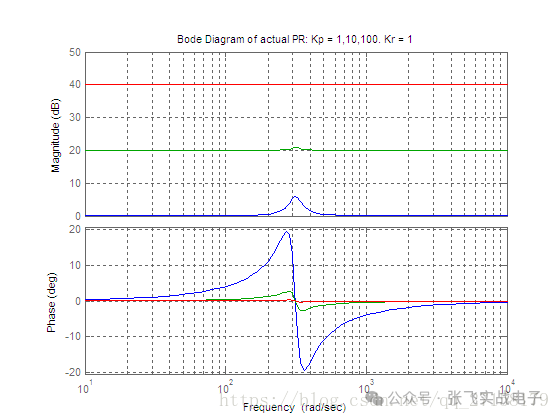
附實現代碼
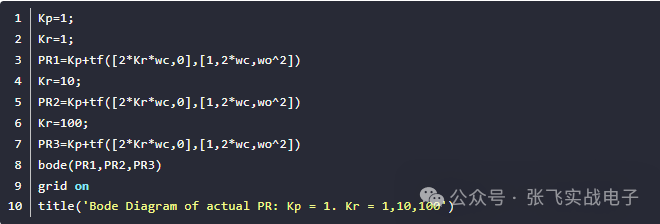
下圖是當Kp=1,Kr分別取為1、10、100時實際的PR控制器的波特圖(藍色是Kr=1,綠色是Kr=10,紅色是Kr=100)。
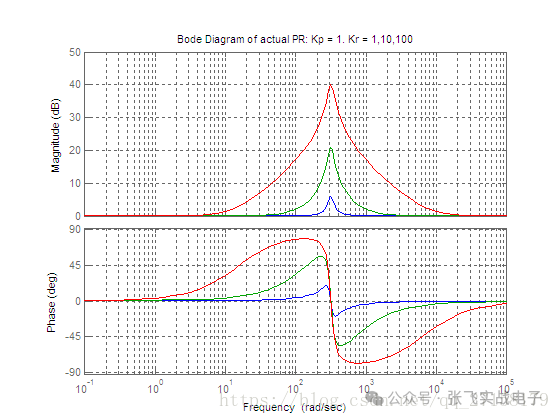
附實現代碼
PI和PR的Kp作用類似,都是增大開環增益,增加控制精度。
Ki和Kr作用類似:降低系統穩態誤差。
2、離散化預備知識
目的是對PR控制器的傳遞函數進行離散化。使其可以在數字控制器上編程實現。在這過程之前,要復習相關知識。同時便于檢查離散化過程有無錯誤。
2.1 離散化表達式
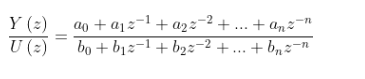
傳遞函數離散化后,函數中消掉了拉普拉斯算子“s”,同時出現了“z”。有一個公式需要認識。

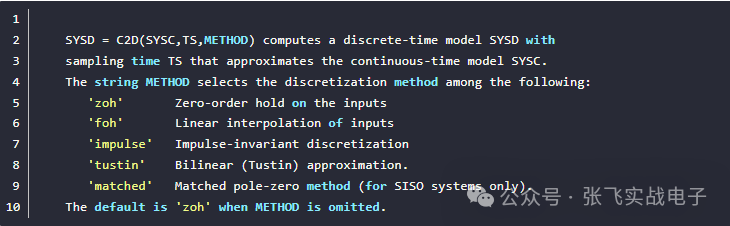
2.2 離散化方法
離散化方法一覽表[來自參考文獻1]
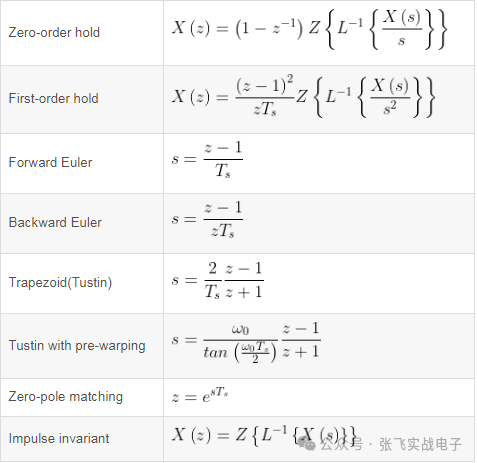
看起來比較簡單的方法是Forward Euler、Backward Euler、Trapezoid(Tustin)這三種了。直接把公式代入,用z消掉s就好了。
2.3 離散化練習題
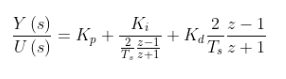
用Trapezoid(Tustin)方法離散化PID控制器。
把 代入上式,得到
代入上式,得到
化簡過程略,得到:

代入Kp=1;Ki=2;Kd=3;Ts=1/1000;可得到
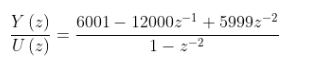
在Matlab中驗證結果:

可得到:
Transfer function:
6001 z^2-1.2e004 z+5999
---------------------------
z^2-1
Sampling time: 0.001
和計算結果一致。
同時Matlab的c2d()函數總共支持五種離散方法。
3. 使用Matlab離散PR控制器
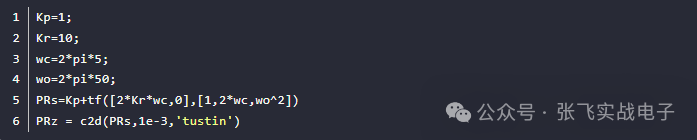
命令行輸出:
Transfer function:
1.297z^2-1.847z+0.643
---------------------------
z^2-1.847 z+0.9405
Sampling time: 0.001
可得到,離散化后,數字實現的C語言為:
y_k-1.847*y_k1+0.9405*y_k2=1.297*u_k-1.847*u_k1 +0.643*u_k2;
即
y_k=1.297*u_k-1.847*u_k1+0.643*u_k2+1.847*y_k1-0.9405*y_k2 ;
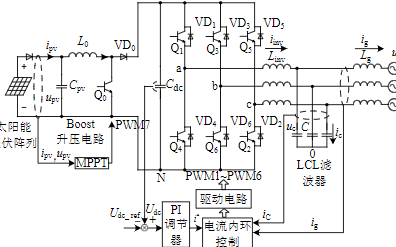
4、逆變器仿真模型中使用PR閉環控制器
Matlab/Simulink搭建了模型:
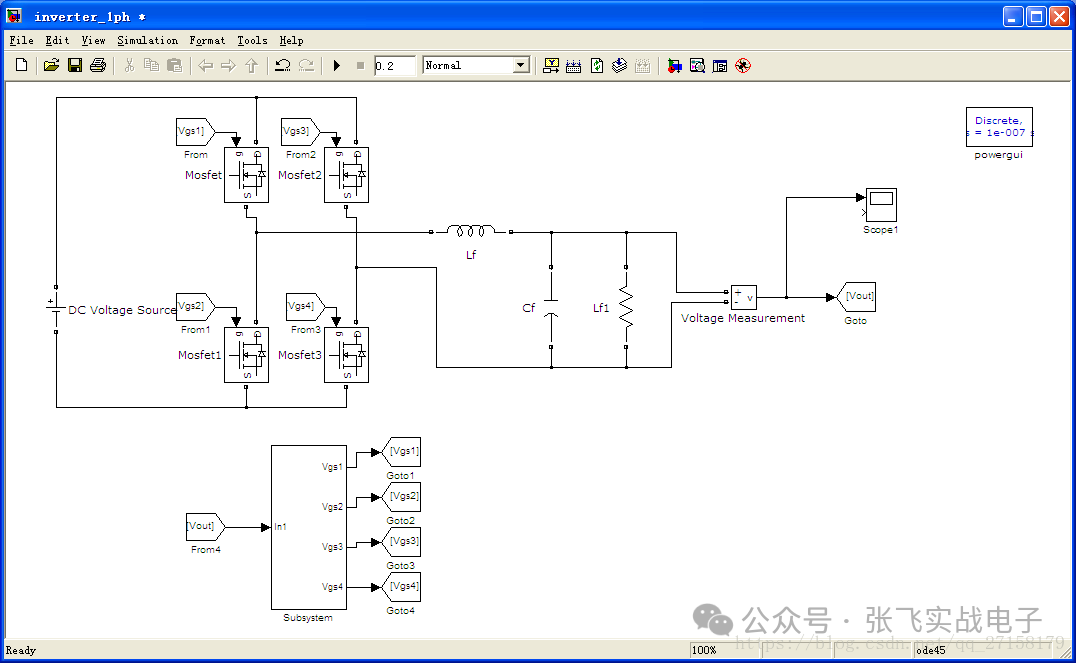
電氣主回路中參數:濾波電感Lf=47uH,濾波電容Cf=1uF,負載Lf1=30歐姆。
控制回路:
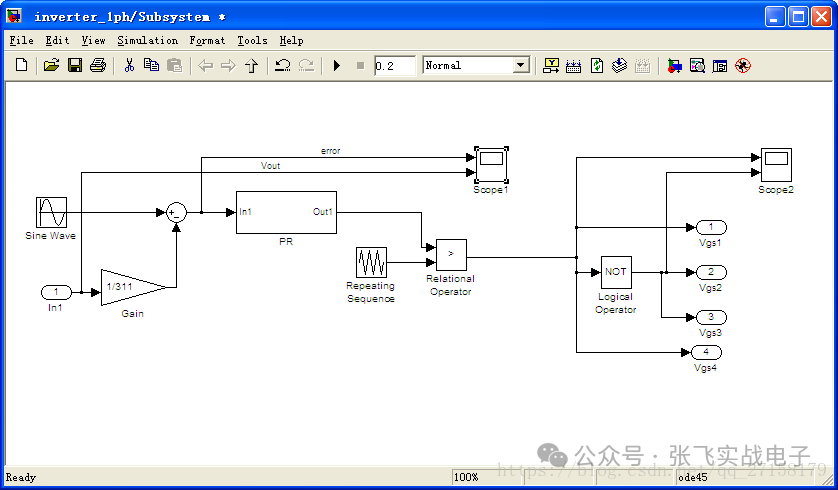
PR控制器實現框圖:
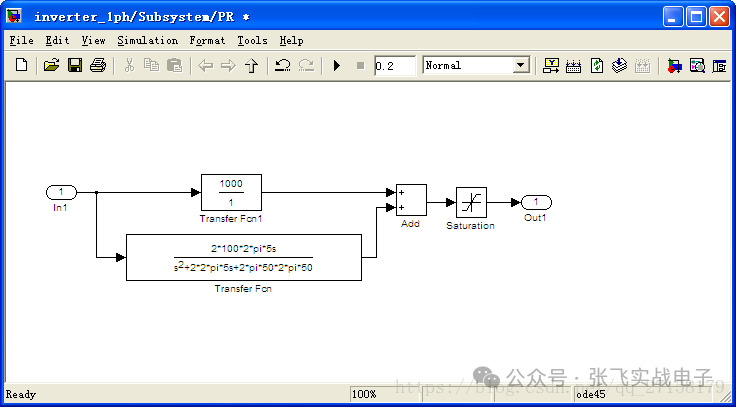
經過參數優化后,Kp=1000,Kr=100;wc=2*pi*5;wo=2*pi*50;
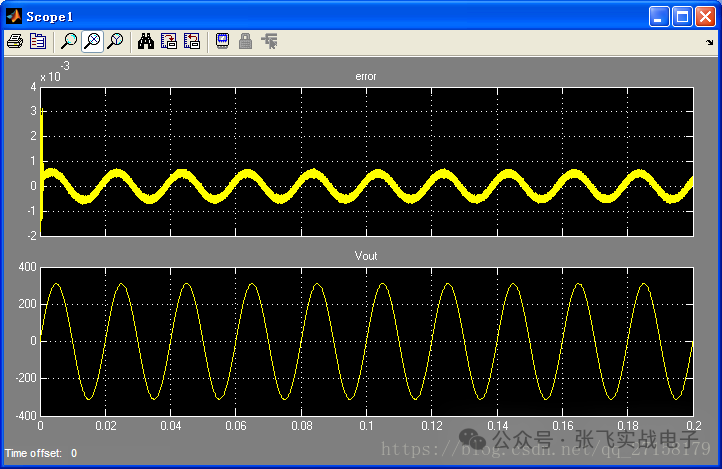
上圖中,error = Vref - Vout/311。Vref為頻率50Hz、幅值為1的正弦波。Vout是逆變器輸出。可以看到閉環系統中誤差可降到1mV *311=0.331V之內(1mV為error波形的幅值,311為電壓標幺化基準值)。
參考資料1:Effects of Discretization Methods on the Performance of Resonant Controllers, Alcjandro G. Ycpcs, IEEE transactions on Power Electronics
參考資料2:PID控制器的數字實現及C語法講解
參考資料3:比例諧振控制的一種實現(含代碼)
參考資料4:采用比例諧振控制器的逆變器_葉禮清
原文鏈接:
https://blog.csdn.net/qq_27158179/article/details/82739641
-
控制器
+關注
關注
112文章
16427瀏覽量
178900 -
比例諧振控制器
+關注
關注
1文章
3瀏覽量
3529
原文標題:比例諧振(PR)控制器的學習過程記錄
文章出處:【微信號:fcsde-sh,微信公眾號:fcsde-sh】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
請問大神如何實現準比例諧振控制?
比例諧振(PR)控制器學習筆記
PI控制器學習筆記記錄
諧振控制器的單相全橋逆變電源波形控制研究
一種可再生能源并網逆變器的多諧振PR電流控制技術
靜止坐標系下利用PR控制器實現入網電流無靜差跟蹤的控制策略

基于逆變器的準比例諧振電流內環控制策略
逆變器的比例諧振(PR)控制






 工商網監
工商網監
評論