") 愛普生慣性測量單元的工作原理
愛普生慣性測量單元的工作原理
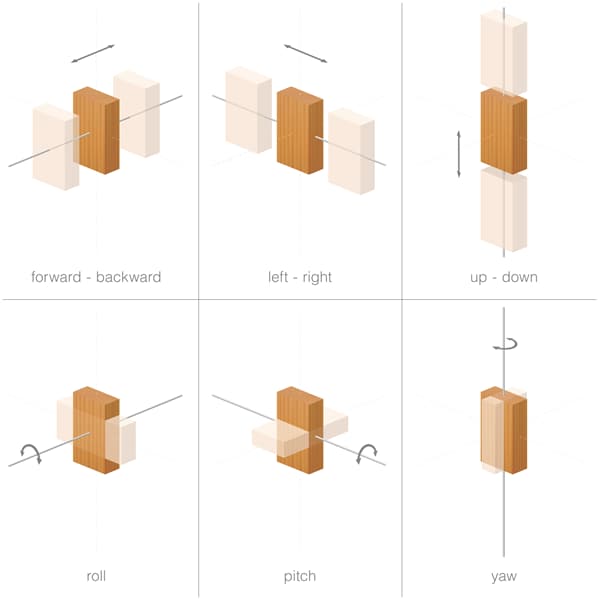
IMU(慣性測量單元,Inertial Measurement Unit)測量物體的角度信息主要依賴于其內(nèi)部的加速度計和陀螺儀。這兩種傳感器協(xié)同工作,通過特定的算法處理數(shù)據(jù),以提供物體的姿態(tài)信息,包括俯仰角、橫滾角和偏航角。
IMU測量角度信息的原理
1.加速度計:
原理:加速度計通過測量物體在三個方向上的線性加速度來工作。在靜止或勻速直線運動狀態(tài)下,加速度計能夠測量到重力加速度在三個軸上的分量,從而推算出物體的傾斜角度(俯仰角和橫滾角)。
應用:在沒有外力作用的情況下,加速度計能夠精確地測量俯仰角和橫滾角,且沒有累積誤差。這是因為重力加速度是一個恒定的向量,其方向指向地心,通過測量重力加速度與IMU各軸之間的夾角,即可確定物體的傾斜角度。
2.陀螺儀:
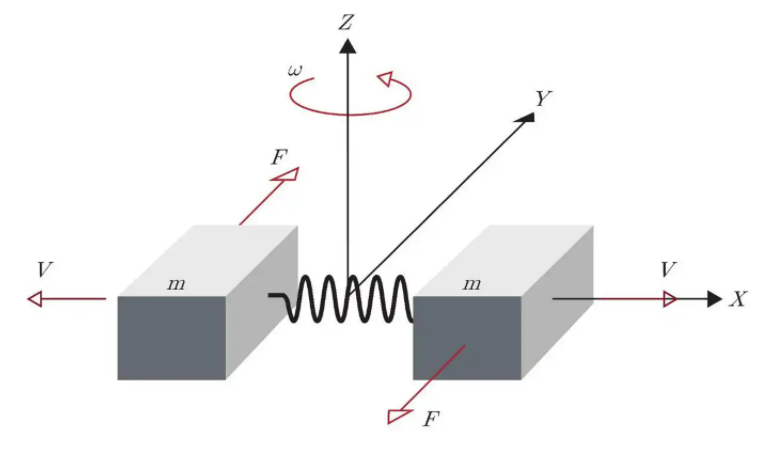
原理:陀螺儀用于測量物體繞各軸的角速度。當陀螺儀繞某一軸旋轉(zhuǎn)時,會產(chǎn)生一個與旋轉(zhuǎn)軸垂直的力(科氏力),這個力會使陀螺儀內(nèi)部的敏感元件發(fā)生偏轉(zhuǎn),從而測量到角速度的大小和方向。
應用:通過積分陀螺儀測量的角速度數(shù)據(jù),可以得到物體在一定時間內(nèi)的旋轉(zhuǎn)角度(包括偏航角)。然而,由于積分過程中會累積誤差(如漂移誤差),因此陀螺儀單獨使用時通常無法長時間保持高精度的角度測量。
IMU通過組合加速度計和陀螺儀的讀數(shù),并應用特定的算法(如卡爾曼濾波、互補濾波等)來融合這兩種傳感器的數(shù)據(jù),從而提供準確、穩(wěn)定的姿態(tài)(角度)信息。加速度計用于修正陀螺儀的積分漂移誤差,而陀螺儀則提供加速度計無法直接測量的快速動態(tài)變化信息。這種組合方式使得IMU能夠在各種復雜環(huán)境下實現(xiàn)高精度的角度測量。
IMU通過加速度計測量物體的傾斜角度(俯仰角和橫滾角),并通過陀螺儀測量角速度并積分得到旋轉(zhuǎn)角度(偏航角)。通過融合這兩種傳感器的數(shù)據(jù),IMU能夠提供準確、穩(wěn)定的物體姿態(tài)信息。這種技術(shù)在航空航天、汽車與無人駕駛、機器人、無人機等領(lǐng)域有著廣泛的應用。
-
愛普生
+關(guān)注
關(guān)注
0文章
333瀏覽量
22190 -
IMU
+關(guān)注
關(guān)注
6文章
319瀏覽量
45833 -
慣性測量單元
+關(guān)注
關(guān)注
2文章
52瀏覽量
10479
發(fā)布評論請先 登錄
相關(guān)推薦
基于MEMS技術(shù)的IMU慣性測量單元的工作原理解析

雷達精準探測的臂助——愛普生新款慣性測量單元HGPM01

愛普生新款慣性測量單元M-G370PDT現(xiàn)已發(fā)貨并投入批量生產(chǎn)

愛普生的慣性測量單元(IMU)M-G370PDT成為無人駕駛的理想選擇
M-G330PDG慣性測量單元:精準控制與智能應用的核心

愛普生(EPSON) 慣性測量單元(IMU)、陀螺儀傳感器等模塊應用領(lǐng)域選型介紹


愛普生M-G330PDG0慣性測量模塊選型






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論