") 機(jī)器人如何實(shí)現(xiàn)移動(dòng)功能
機(jī)器人如何實(shí)現(xiàn)移動(dòng)功能
引言— 移動(dòng)功能回顧
在前面兩篇《如何制造足球機(jī)器人》文章中,我們主要圍繞機(jī)器人本體進(jìn)行了硬件設(shè)計(jì),而這次將以控制器為中心,開展軟件設(shè)計(jì)工作。在正式開始之前,先為大家回顧一下機(jī)器人如何實(shí)現(xiàn)移動(dòng)功能的設(shè)計(jì)。
本體的移動(dòng)采用三組名為“全向輪”的特殊輪胎,如下圖 (圖1) 所示。它們能夠支持垂直方向的移動(dòng),從而實(shí)現(xiàn)八個(gè)方向的移動(dòng)控制。
操作上,利用英飛凌的 3D 磁傳感器設(shè)計(jì)了一個(gè)類似游戲機(jī)手柄的操縱桿,以控制機(jī)器人移動(dòng)。此外新增三個(gè)按鈕,分別實(shí)現(xiàn)右轉(zhuǎn)、左轉(zhuǎn)和停止功能,使控制器具備共計(jì) 11 種移動(dòng)控制選項(xiàng)。下圖 (圖2) 為控制器的外觀設(shè)計(jì):
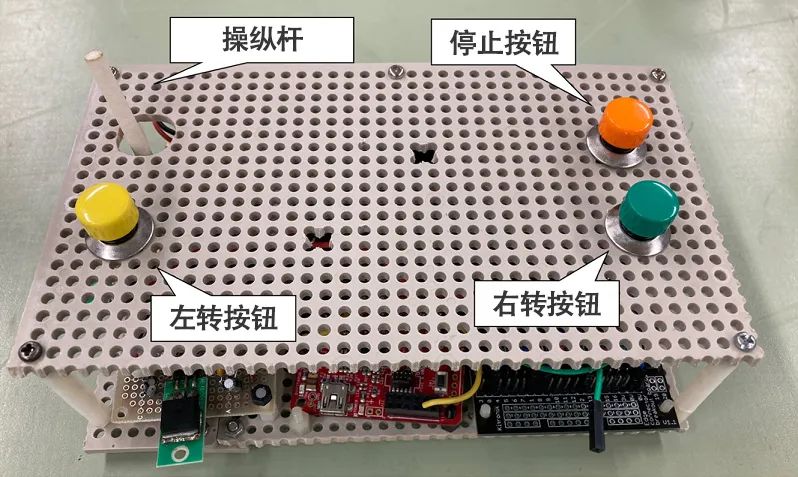
圖2 控制器外觀
控制器實(shí)現(xiàn)與控制原理
由于控制器需實(shí)現(xiàn) 11 種本體動(dòng)作控制,因此每個(gè)條件使用 4 個(gè) I/O 引腳向機(jī)器人本體發(fā)送信號(hào)。此外,當(dāng)發(fā)送信號(hào)時(shí),為了判斷動(dòng)作是否與實(shí)際信號(hào)匹配,在機(jī)器人本體的四個(gè)角上安裝了指示燈,以便對(duì)應(yīng)每種動(dòng)作信號(hào)的反饋情況。輸入端口與反饋信號(hào)的對(duì)應(yīng)關(guān)系如下表 (表1) 所示:

表1 控制器輸入端口與和反饋信號(hào)的關(guān)系
控制器與 3D 磁傳感器及微控制器 (MCU) 之間通過 I2C 通信協(xié)議進(jìn)行信號(hào)傳遞,MCU 作為主控設(shè)備,3D 傳感器作為從設(shè)備,實(shí)現(xiàn)各類信號(hào)的交換。下圖 (圖3) 顯示了控制器工作的簡(jiǎn)單流程圖:
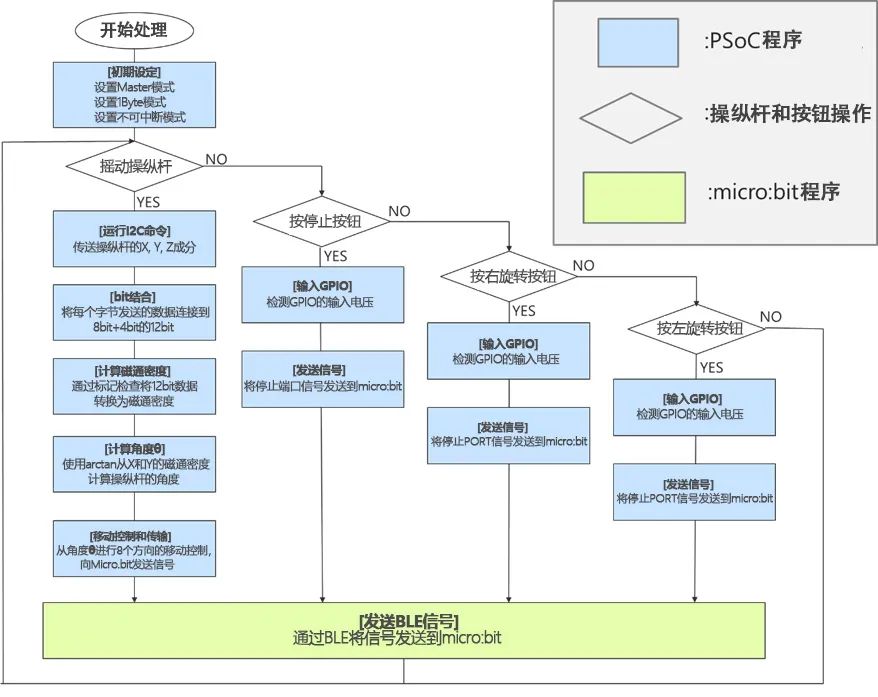
圖3 控制器工作流程圖
一. 當(dāng)控制器打開時(shí),微控制器將寫入的 I2C 發(fā)送到 3D 傳感器以更改初始設(shè)置,如下圖 (圖4) 所示:
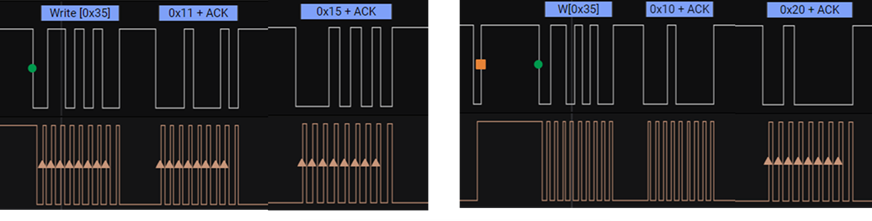
圖4 I2C 主寫入的波形
二. 通過移動(dòng)操縱桿,MCU 接收來(lái)自 3D 傳感器的因操縱桿傾斜生成的 3 軸磁通密度數(shù)據(jù),并使用 X 軸和 Y 軸把 3 軸磁通密度信息轉(zhuǎn)成操縱桿的角度 θ,如下圖 (圖5) 所示:
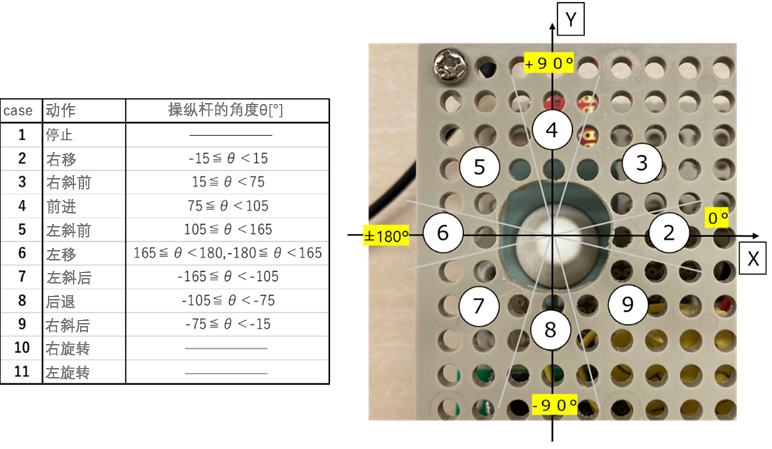
圖5 操縱桿和角度檢測(cè)
三. 當(dāng) MCU 向 3D 傳感器讀取數(shù)據(jù)時(shí),使用 UART 進(jìn)行調(diào)試,以便查看三個(gè)軸的磁通量密度和與磁通量密度對(duì)應(yīng)的操縱桿角度 θ。
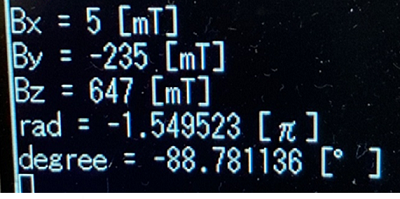
圖6 I2C 主寫入的波形
四. 根據(jù)計(jì)算出的角度 θ,MCU 通過無(wú)線通信將移動(dòng)控制信號(hào)傳輸至機(jī)器人本體。五. 停止、左轉(zhuǎn)、右轉(zhuǎn)功能通過機(jī)械按鈕實(shí)現(xiàn),優(yōu)先級(jí)最高,可覆蓋其他狀態(tài)。
軟件設(shè)計(jì)
在本項(xiàng)目中,使用的 MCU 是英飛凌的 PSoC 系列,這款產(chǎn)品支持模擬/數(shù)字電路的靈活配置,具備高度可定制化的特點(diǎn)。下圖 (圖7) 為英飛凌 PSoC 組件示例圖:
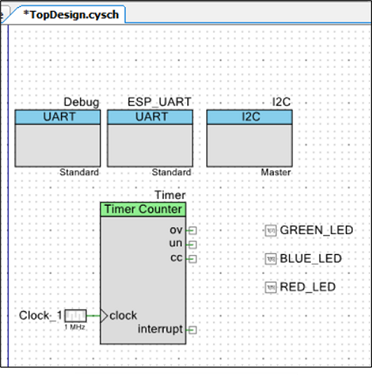
圖7 英飛凌 PSoC 組件示例
總結(jié)
本文主要介紹了制造足球機(jī)器人中的軟件設(shè)計(jì)部分。
-
mcu
+關(guān)注
關(guān)注
146文章
17310瀏覽量
352193 -
控制器
+關(guān)注
關(guān)注
112文章
16437瀏覽量
178988 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28620瀏覽量
207932 -
軟件
+關(guān)注
關(guān)注
69文章
5002瀏覽量
87918
原文標(biāo)題:如何制造足球機(jī)器人 (3)
文章出處:【微信號(hào):駿龍電子,微信公眾號(hào):駿龍電子】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論