 如何使用PLC控制myCobot 320機械臂
如何使用PLC控制myCobot 320機械臂
根據持續的用戶反饋,目前市場對 PLC 與 myCobot 系統集成的需求很大,因此本文提供的案例介紹了如何使用 PLC(可編程邏輯控制器)來控制 myCobot 320 機械臂。本案例重點介紹如何實現這一集成效果。
一、本項目使用的硬件組件
Raspberry Pi 4 Model B
M5Stack ESP32 Basic Core IoT Development Kit
Elephant Robotics myCobot 320 m5
二、知識概覽
什么是 PLC?
對于熟悉工業級機械臂的人來說,PLC 可能是一個熟悉的概念。PLC 代表可編程邏輯控制器,這是一種工業數字計算機,專為控制工業環境中的各種機械和生產過程而設計。PLC 廣泛用于自動化,用于執行邏輯控制、順序控制、定時、計數和算術運算等任務。
通過將機械臂的靈活性與 PLC 的穩定性和實時功能相結合,可以為特定場景開發量身定制的解決方案。
myCobot 320 是一款 6 自由度機械臂,有兩個版本:一個使用 M5Stack-Basic 作為嵌入式開發板,另一個使用 Raspberry Pi 4B。手臂僅重 3360 克,重量輕且便于攜帶。它的末端執行器可以處理最大 1000g 的有效載荷,足以滿足大多數實驗場景。此外,用戶可以將攝像頭或執行器(如夾具或抽吸泵)連接到末端執行器,留下大約 600 克的剩余有效載荷能力。手臂的最大工作半徑為 350 毫米,可在各種情況下靈活移動。
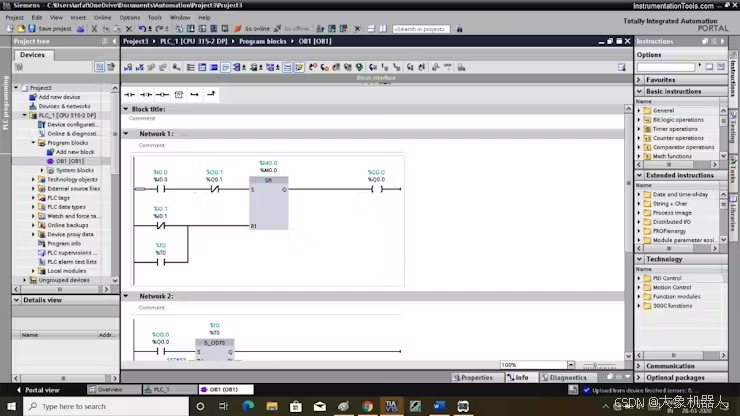
SiemensS7-1200 PLC是一款緊湊的模塊化可編程邏輯控制器,專為中小型自動化項目而設計。它提供高可靠性、實時性能和靈活的可擴展性。S7-1200 支持多種工業協議(如 Profinet 和 Modbus),包括一個以太網接口,可與傳感器、執行器和其他設備無縫集成。
它使用 TIA Portal 軟件進行編程,支持梯形圖、功能塊圖和其他語言,使開發和維護變得簡單明了。廣泛應用于工業生產、樓宇自動化和機械控制,提供穩定高效的控制解決方案。
三、硬件操作
當機械臂接收到 PLC 的 IO 信號時,它會執行一個運動,將所有關節重置為零位置。此操作主要用于在兩個系統之間建立通信。
原理解釋:
1. 機械臂的輸出端口首先發送信號。
2. 一旦 PLC 檢測到輸入信號,它就會輸出一個信號來為 24V 繼電器線圈供電。
3. 繼電器的常開觸點閉合,將低電平信號傳輸到機械臂的輸入端口。
4. 當機械臂檢測到輸入信號時,它會執行動作以將其所有關節重置為零位置。
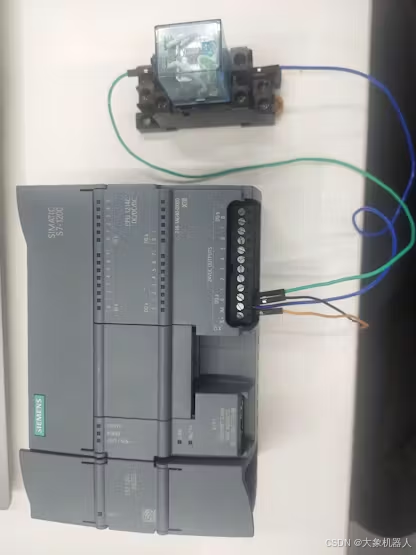
硬件連接
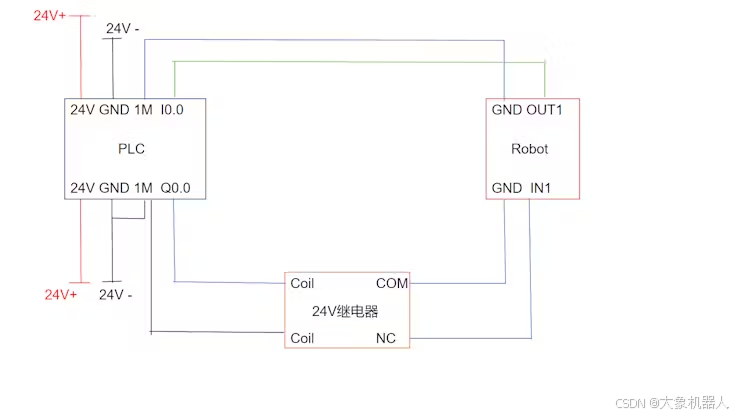
將機械臂的輸入連接到 PLC 的輸出
1. PLC 為西門子 S7-1200,輸出類型為 PNP,而機械臂的輸入類型為 NPN。因此,需要一個中間繼電器來轉換信號。
2. 將電源連接到 PLC。

3、將繼電器線圈連接到PLC的公共端子和Q0.0

4.將繼電器的常開觸點連接到端子上。
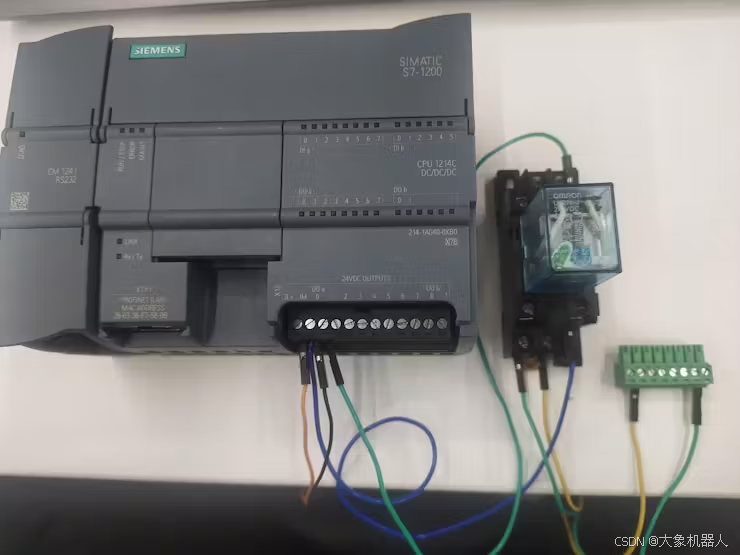
5. 然后將端子連接到機器人的 IN1 輸入。
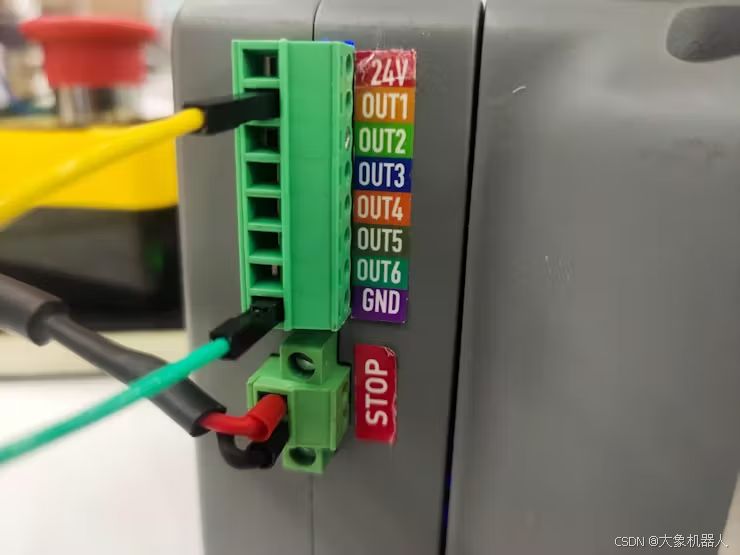
將機械臂的輸出連接到 PLC 的輸入
1. PLC 是西門子 S7-1200,其輸入類型支持 PNP 和 NPN。機械臂的輸出類型為 PNP,因此 PLC 輸入應使用 PNP 配置。
2. 將 24V 連接到 PLC 的輸入端子。
3. 將機械臂的接地端(GND)和輸出 1(OUT1)連接到可編程邏輯控制器(PLC)的公共端和 I0.0。
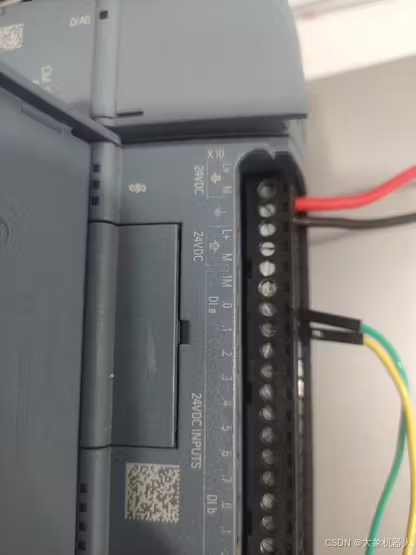
4. 將端子插入機械臂的輸出端。
四、軟件操作
機械臂程序
from pymycobot import MyCobot
import time
# Initialize the myCobot on COM port 8
mc = MyCobot("COM8")
# Set the basic output port 1 to low level (0)
mc.set_basic_output(1, 0)
# Infinite loop to monitor input signals
while 1:
# Check the status of input port 1
if mc.get_basic_input(1) == 0:
# If the input is low level (0), send angles to reset all joints to zero
mc.send_angles([0, 0, 0, 0, 0, 0], 50)
break # Exit the loop once the action is executed
else:
pass # Do nothing and continue checking
# Set the basic output port 1 to high level (1)
mc.set_basic_output(1, 1)
五、小結
西門子PLC以其高穩定性、實時性和抗干擾性而聞名,使其專為工業環境而設計。它們非常適合工廠自動化、惡劣環
境和涉及多個設備的復雜工作流程。PLC支持Profinet和Modbus等標準工業通信協議,實現與傳感器、執行器和其他設備的無縫集成。這確保了系統能夠以毫秒級的響應時間長期穩定運行。對于要求高可靠性的場景,如裝配線控制、設備同步或環境條件嚴格的工廠,PLC是最佳選擇。 而Python則在開發靈活性和效率方面表現出色,憑借其豐富的庫和工具,Python適用于算法實現、機器學習和復雜的運動控制應用。Python更適用于可以快速開發和驗證新想法的研究和實驗場景。但在實時性能和對惡劣環境的適應性方面相對較弱,因為它取決于底層硬件和操作系統性能。 如果首要需求是長期穩定運行、實時控制和工業環境集成,PLC是更好的選擇。如果重點是快速開發和算法靈活性,Python更適合。兩者也可以結合起來,Python處理高級算法,PLC管理低級控制,為更廣泛的應用提供解決方案。
-
plc
+關注
關注
5016文章
13383瀏覽量
464753 -
機械臂
+關注
關注
12文章
520瀏覽量
24666
原文標題:PLC 與 myCobot 320 結合案例發布!硬件、軟件和應用程序相結合,提高工業應用場景穩定性
文章出處:【微信號:ElephantRobotics,微信公眾號:大象機器人】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
使用myCobot 280機械臂結合ROS2系統搭建機械分揀站

RK3568國產實驗箱+人工智能機械臂:跳舞、疊羅漢、夾方塊、積木搬運案例全解!

OrangePi AIpro應用:機械臂應用開發指南

開源六軸協作機器人myCobot 320結合人臉表情識別情緒!

大象機器人開源協作機械臂機械臂接入GPT4o大模型!

PLC在機械手控制系統中的具體應用
基于六維力傳感器的機械臂自動裝配應用

汽車噴涂車間里怎么突破機械臂遠程無線控制這一難題?
大象機器人開源協作機械臂myCobot 630 全面升級!
自然語言控制機械臂:ChatGPT與機器人技術的融合創新(下)

機械臂技術的前沿探索:年度案例回顧!

如何去提升機械臂的位置控制性能

大象機器人六軸協作機械臂myCobot 320 進行手勢識別!






 工商網監
工商網監
評論