 PLC與步進電機的運動控制詳解
PLC與步進電機的運動控制詳解
步進電機由于體積精巧、價格低廉、運行穩定,在低端行業應用廣泛,步進電機運動控制實現全閉環,是工控行業的一大難題。
主要問題有兩個,原點的不確定性和失步,目前,采用高速光電開關作為步進系統的原點,這個誤差在毫米級,所以在精確控制領域,是不能接受的。另外,為了提高運行精度,步進電機系統的驅動采用多細分,有的大于16,假如用在往復運動過程中,誤差大的驚人。已經不能適應加工領域。
為此,提出步進電機全閉環控制系統,以適應目前運動控制領域的需求。
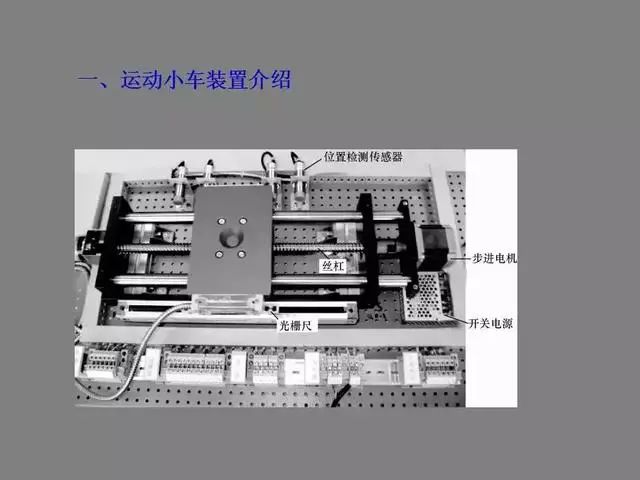
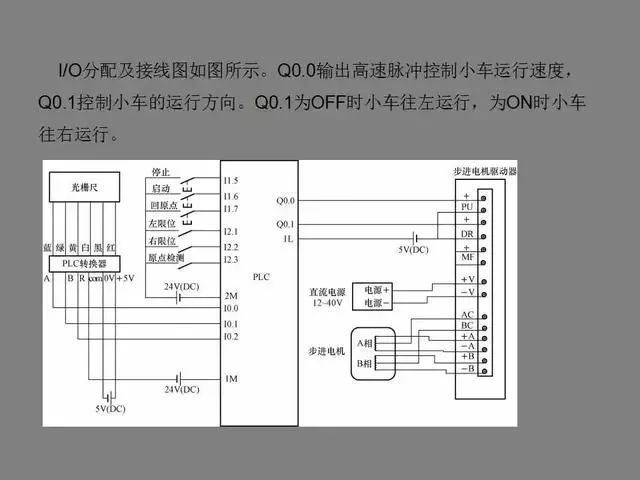
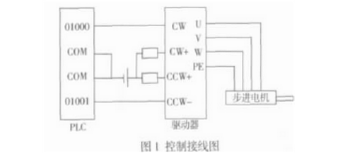
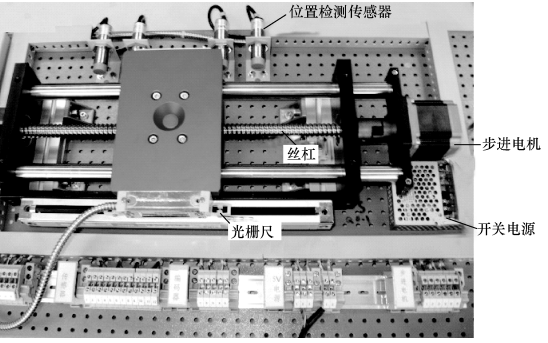
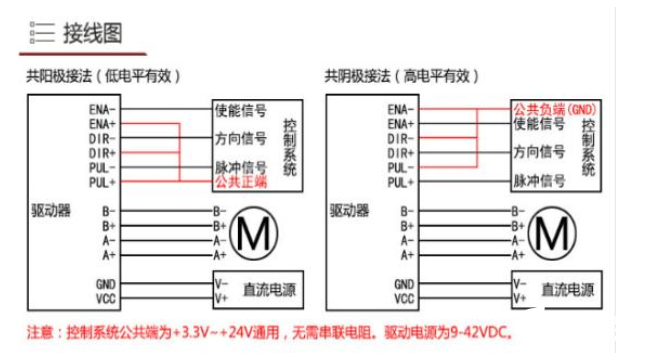
1、 硬件連接
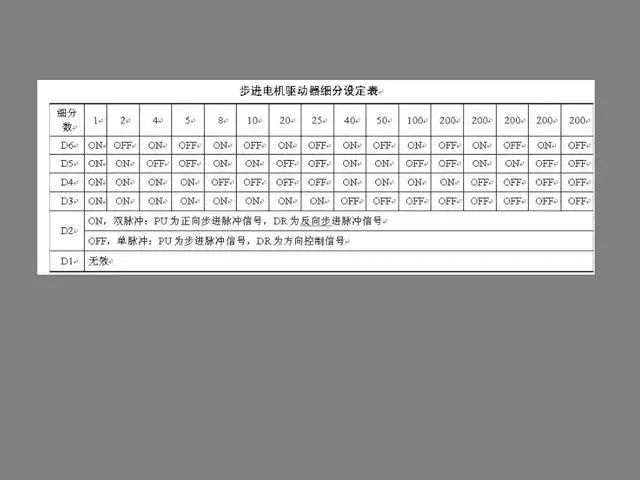
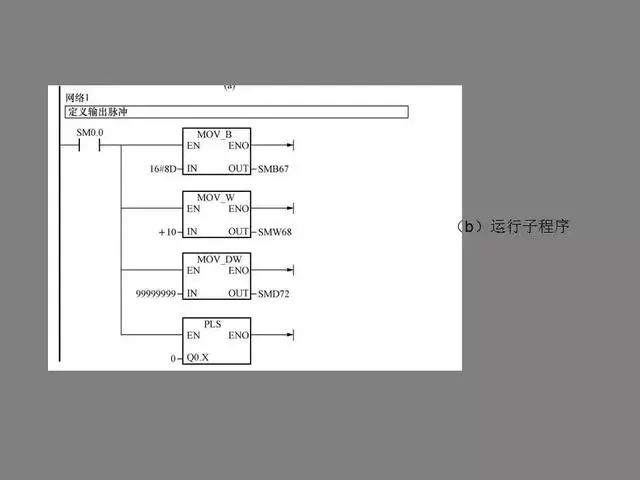
硬件連接加裝編碼器,根據細分要求,采用不同等級的解析度編碼器進行實時反饋。
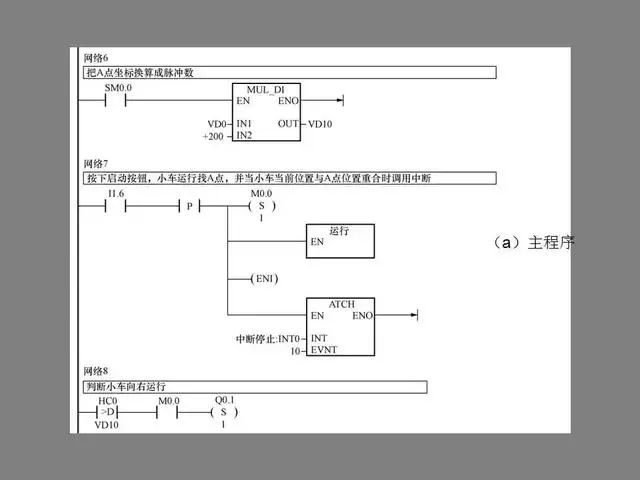
2、 原點控制
根據編碼器的Z信號,識別、計算坐標原點,同數控系統相同,精度可以達到2/編碼器解析度×4。
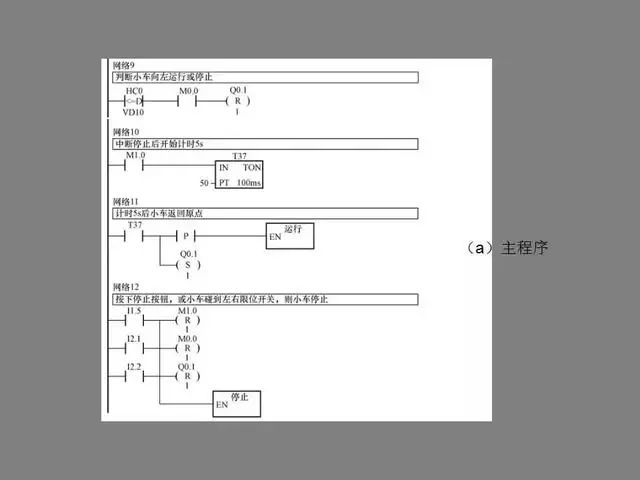
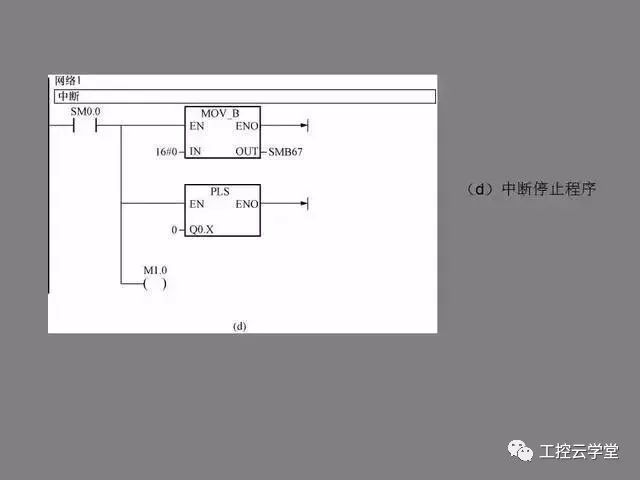
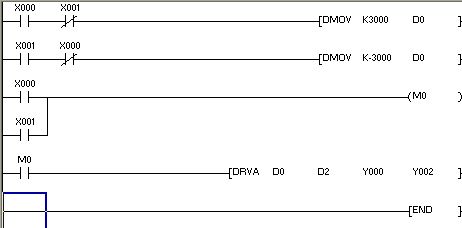
3、 失步控制
根據編碼器的反饋數據,實時調整輸出脈沖,根據失步調整程度,采取相應辦法。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規問題,請聯系本站處理。
舉報投訴
-
編碼器
+關注
關注
45文章
3643瀏覽量
134510 -
plc
+關注
關注
5011文章
13297瀏覽量
463306 -
步進電機
+關注
關注
150文章
3110瀏覽量
147484
原文標題:PLC與步進電機的運動控制知識,35張PPT一目了然!
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
根據PLC的步進電機完成單雙軸運動控制的設計
和計算機技術的發展,步進電機的需求量與日俱增,在各個行業的控制領域都將有廣泛應用。PLC 作為一種工業控制計算機,具有模塊化結構、配置靈活、
S7-200、變頻器與觸摸屏的應用PLC與步進電機的運動控制實例說明
本文檔的主要內容詳細介紹的是S7-200、變頻器與觸摸屏的應用PLC與步進電機的運動控制資料說明。一、運
發表于 10-25 08:00
?45次下載

plc如何控制步進電機的速度和方向?
plc作為一種工業控制計算機,具有模塊化結構、配置靈活、高速的處理速度、精確的數據處理能力、PLC對步進電機也具有良好的
發表于 08-02 10:05
?1338次閱讀
plc如何控制步進電機的速度和方向?
plc作為一種工業控制計算機,具有模塊化結構、配置靈活、高速的處理速度、精確的數據處理能力、PLC對步進電機也具有良好的






 工商網監
工商網監
評論