 集成、PLC、機器人和運動控制
集成、PLC、機器人和運動控制
一、概述
傳統上,工業機器人使用復雜的專有語言編程,對外人來說是很難的,只有機器人程序員才能理解。運動控制器現在應用廣泛多樣,通常使用PC庫或其他專有語言來編程,而PLC傾向用梯形邏輯來編程。在今天的自動化環境中,PLC、運動控制器和機器人需要緊密集成。許多不同的組件集成到機器的設計中,而每種組件需要通過他們的專用語言才能呈現自己的特長。越來越多的最終用戶要求把機器人、運動控制器和可編程控制器都用熟悉的PLC語言進行編程。這些語言對機器制造商的程序員更容易理解,也使最終用戶的服務人員更容易維護。為了減少復雜性,協調這三個不同的平臺的外觀、感覺和功能,PLCopen工作組為運動控制已經拿出了一套標準化工具,能在PLC編程環境下直接對運動控制編程。
二、PLC
自從1968年在通用汽車公司使用開始(用來代替硬連線繼電器),PLC就使用梯形邏輯編程。它們可容易地控制數字和模擬設備的過程,但對更復雜、連續性質過程的編程要比用高級編程語言,如BASIC、C或C#更加困難。多年來,PLC已經進化到可以用BASIC或C語言編程的水平,但大部分仍然依賴于梯形邏輯。很多低端PLC通過步進和方向輸出支持運動控制。一些更高水平的運動控制可以通過昂貴的專用模塊來實現,但必須添加到基本系統。盡管這樣,大多數設備用梯形邏輯編程,需要熟悉編程環境,制造工藝,以及專門的功能塊才能實現需要的功能。
三、運動控制器
一般市場中的運動控制器通常包括插補功能(直線插補或圓弧插補),協同運動、齒輪、凸輪和事件觸發動作(使用傳感器和位置鎖存)。在老控制器中,每軸使用專用的輸入和輸出。運動輸入,如使能、超程限位和編碼器輸入(每軸一個或兩個)和類似伺服命令的運動輸出(通常為+/-10V模擬量)和/或步進指令(步進和方向)。多數控制器還具有一些通用的I/ O。新控制器依靠數字網絡,如EtherCAT或SERCOS用來傳遞控制信號至驅動器,接收和發送直接連接到驅動器的數字IO。
在處理聯動的運動時,典型的運動控制器無法與機器人控制器競爭。典型的運動控制器,如果你想把末端執行器移動到一個特定點,你必須為每個軸找出正確的位置。你需要對機器人和有機械連接機制的其他機器做的事情是使用反向運動學的方法來編程。使用時需要公式,在物理空間中,需要把特定點轉換為各自的位置,描述每個關節(或軸)需要移動至所述機械連接機構的終點。同樣,這些系統應用廣泛多樣,需要熟悉他們的特定編程環境。
四、機器人控制器
在處理聯動的運動時,典型的運動控制器無法與機器人控制器競爭。典型的運動控制器,如果你想把末端執行器移動到一個特定點,你必須為每個軸找出正確的位置。你需要對機器人和有機械連接機制的其他機器做的事情是使用反向運動學的方法來編程。使用時需要公式,在物理空間中,需要把特定點轉換為各自的位置,描述每個關節(或軸)需要移動至所述機械連接機構的終點。同樣,這些系統應用廣泛多樣,需要熟悉他們的特定編程環境。
五、合并成一臺機器控制器
公司在同一站點還運營一個潤滑油調配工PLCopen工作組為運動控制進行了標準化,邏輯定義了機器控制編程的所有內容。這是一種集成PLC、機器人和運動控制的最佳嘗試,用一種容易理解的、多數制造商都常用的語言。許多功能塊是基本的,例如,相對或絕對移動的功能塊,這在任何運動控制系統中都很容易理解。當需要增加運動的難度時,多個控制系統的標準化和通用性外觀和感覺確是一個優勢。例如,在每個各自運動停止下個運動開始前,很容易把相對或絕對運動串在一起。可以想象一下一組復雜的運動,一個軸需要在非零速度的情況下轉換到下個運動,在軸的整個路徑混合各個運動到一個順序的運動。 PLCopen運動控制定義了標準的混合操作,允許程序員用公共混合和轉換模式實現這個順序運動。
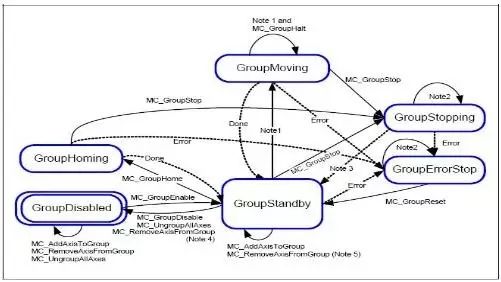
有一個基本的問題,當多個軸在一起運動且用數學模型控制機械連接軸時,并不總是清楚哪些關鍵軸需要同步運動。因此,當故障發生時,運動控制器并不總能知道哪些軸受到影響。PLCopen針對這個問題定義了一個運動組,當組中的一個軸有錯誤時,控制器可以生成一個適當的錯誤響應。這個分組的概念允許程序員可以把注意力集中在機器所需的特定任務上,通過實施下圖所示的組狀態機,由控制器來照顧該組的功能,
PLCopen運動標準的第四部分包含了用于協調運動的功能塊。他們定義了一套標準化的功能塊,用于3D空間內的復雜運動控制,包括運動轉換的功能塊。通常,這些轉換必須由廠商提供,因此,對于大多數制造商,如果運動控制器不支持,就不能添加運動轉換功能。
這個標準現在創建了PLC、數控(CNC)機器人和運動控制之間的一座橋梁。現在可以用一種和PLC一樣的編程環境,完成一臺機器的全部控制。這個標準使機器人、運動控制器成為控制系統的一個部分,而不是獨立系統。集成運動控制和邏輯控制,是現代機械控制的兩個主要需求。這具有明確的優點:在一個程序包中同時具有運動控制和邏輯控制,包括但不限于,幾乎無限制地交換邏輯和運動之間的數據,沒有延遲,這在傳統系統中可能限制了性能。事實上,現在有可能使用機器控制器完美同步機器人與附加伺服軸,這種技藝以前只能在機器人控制器的領域來實現。
六、結論
PLCopen標準的最終目標是讓控制程序代碼完全獨立于硬件或特定制造商。當不同的硬件廠商支持相同的底層代碼和以同樣方式的運行時,程序員將從學習每個制造商專有語言的噩夢中解放出來。這個結果可以改進復雜整機控制系統的精度和吞吐量,使開發和上市時間更短。 PLCopen使這種開發減少工程復雜性和專業性培訓,使整個系統更容易被PLC編程人員所熟悉。
-
plc
+關注
關注
5011文章
13297瀏覽量
463342
原文標題:集成 PLC、機器人和運動控制
文章出處:【微信號:GKB1508,微信公眾號:工控幫】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
機器人、協作機器人和移動機器人,你分的清楚嗎
上位機全套程序,上位機與機器人和PLC通訊都是通過以太網總線方式
機器人運動控制領域運的難點分析
基于PLC機器人系統設計研究

基于PLC的機器人伺服運動控制系統設計詳解
如何使用PLC控制實現工業機器人系統的設計
柔性機器人和剛性機器人有什么區別?






 工商網監
工商網監
評論