

最近,人形機(jī)器人在全球范圍內(nèi)引發(fā)了巨大的關(guān)注,成為科技領(lǐng)域最熱門的話題之一。從特斯拉的Optimus到稚暉君的遠(yuǎn)征A2系列,再到春晚舞臺上驚艷亮相的宇樹機(jī)器人,這些機(jī)器人不僅展示了強(qiáng)大的技術(shù)實(shí)力,更讓人們看到了人形機(jī)器人未來走進(jìn)日常生活的可能性。

特斯拉Optimus

遠(yuǎn)征A2系列
在2025年的春晚舞臺上,宇樹科技的人形機(jī)器人H1憑借其靈活的舞姿和精準(zhǔn)的AI互動,成功“出圈”。這些機(jī)器人在節(jié)目中展示了扭秧歌、轉(zhuǎn)手絹等復(fù)雜動作,背后是宇樹科技強(qiáng)大的AI驅(qū)動全身運(yùn)動控制技術(shù)和360°全景深度感知技術(shù)。與此同時(shí),特斯拉的Optimus人形機(jī)器人也在全球范圍內(nèi)引發(fā)了熱議,其展示了高度擬人化的動作和強(qiáng)大的任務(wù)執(zhí)行能力。
宇樹機(jī)器人
而在這場人形機(jī)器人技術(shù)的浪潮中,樹莓派(Raspberry Pi)與ROS(機(jī)器人操作系統(tǒng))的組合正在成為推動機(jī)器人走向大眾的重要力量。樹莓派憑借其小巧、低成本的特點(diǎn),成為機(jī)器人開發(fā)領(lǐng)域的熱門硬件平臺。它不僅能夠運(yùn)行Linux操作系統(tǒng),還能通過豐富的接口連接各種傳感器和執(zhí)行器,與ROS無縫對接。這種組合的優(yōu)勢在于其極高的性價(jià)比和強(qiáng)大的社區(qū)支持,使得更多開發(fā)者能夠輕松入門。
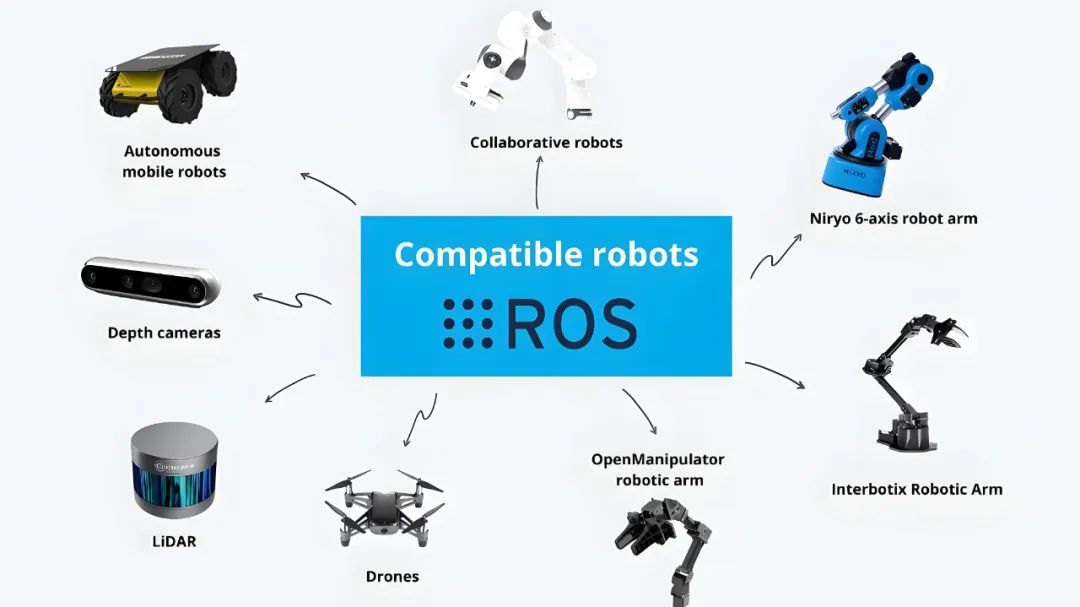
ROS是什么?為什么選擇它?
ROS(Robot Operating System)并非傳統(tǒng)意義上的操作系統(tǒng),而是一個(gè)開源的機(jī)器人軟件框架,用于開發(fā)、管理和通信機(jī)器人應(yīng)用。它提供了硬件抽象、設(shè)備驅(qū)動、通信協(xié)議等功能,使得開發(fā)者可以專注于算法和應(yīng)用開發(fā),而無需深入了解硬件細(xì)節(jié)。此外,ROS的開源性、強(qiáng)大的社區(qū)支持以及廣泛的適用性,使其成為機(jī)器人開發(fā)中的“瑞士軍刀”。
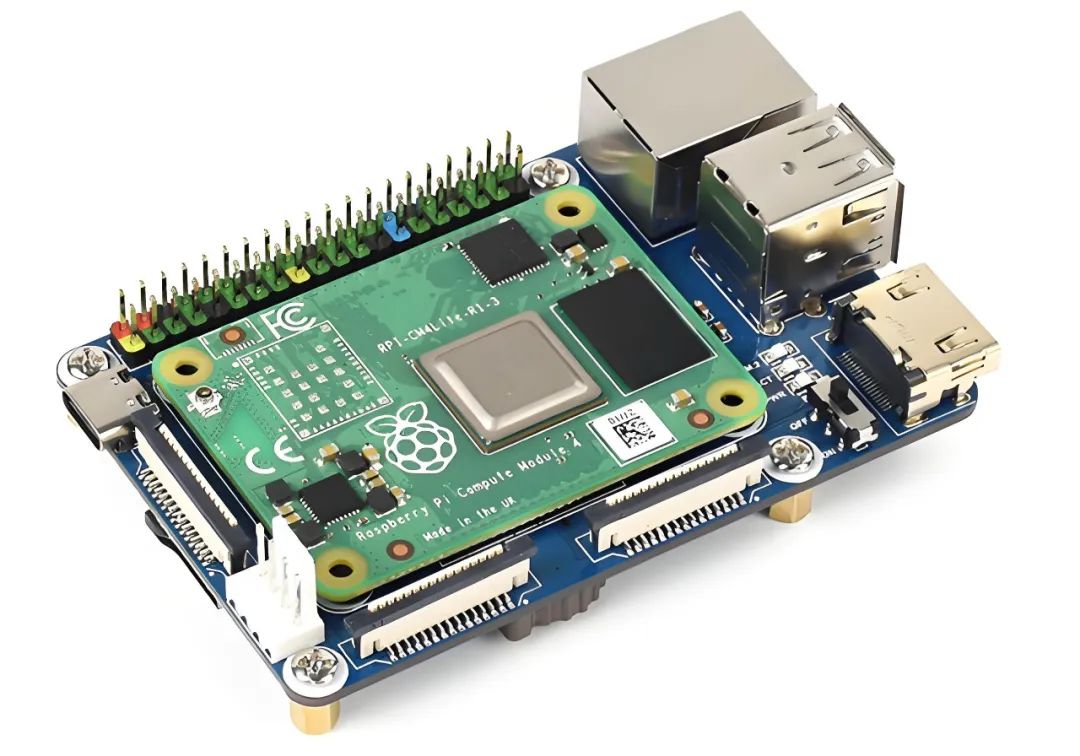
樹莓派是什么?它如何與ROS結(jié)合?
樹莓派是一款小巧、低成本的微型計(jì)算機(jī),支持多種操作系統(tǒng),包括Linux。它擁有豐富的接口(如USB、HDMI、GPIO等),可以輕松連接傳感器、攝像頭、顯示器等外設(shè)。樹莓派與ROS的結(jié)合非常自然:樹莓派運(yùn)行Linux系統(tǒng),而ROS基于Linux開發(fā),兩者可以無縫對接。
在ROS中,樹莓派可以作為主節(jié)點(diǎn)(master node)協(xié)調(diào)其他節(jié)點(diǎn)的通信,也可以作為從節(jié)點(diǎn)(slave node)執(zhí)行特定任務(wù)。這種靈活性使得樹莓派成為ROS開發(fā)的理想硬件平臺之一。
樹莓派用于ROS開發(fā)的優(yōu)點(diǎn)
成本低:樹莓派價(jià)格親民,適合預(yù)算有限的開發(fā)者和教育機(jī)構(gòu)。
便攜性強(qiáng):體積小巧、重量輕,可以輕松安裝在機(jī)器人上。
功能豐富:樹莓派支持多種操作系統(tǒng)和軟件包,可以輕松擴(kuò)展功能。
社區(qū)支持強(qiáng)大:樹莓派和ROS都擁有龐大的開發(fā)者社區(qū),提供豐富的教程和資源。
教育價(jià)值高:樹莓派的易用性和ROS的強(qiáng)大功能使其成為機(jī)器人教育的絕佳工具。
樹莓派用于ROS開發(fā)的缺點(diǎn)
性能有限:樹莓派的計(jì)算能力和內(nèi)存相對較低,難以處理復(fù)雜的任務(wù),如圖像處理或深度學(xué)習(xí)。
可靠性問題:樹莓派不適合在惡劣環(huán)境下使用,可能會因高溫、灰塵、濕度或振動而損壞。
安全性不足:樹莓派容易受到網(wǎng)絡(luò)攻擊,需要額外的安全措施來保護(hù)數(shù)據(jù)。
SD卡壽命問題:運(yùn)行ROS時(shí),樹莓派的讀寫操作頻繁,可能導(dǎo)致SD卡故障。
如何開始樹莓派與ROS的開發(fā)之旅?
如果你對樹莓派和ROS的開發(fā)感興趣,以下是一些入門建議:
1.選擇合適的樹莓派型號:建議選擇Raspberry Pi 3或更高版本,因?yàn)樗鼈兊男阅芨谩?/p>
2.安裝操作系統(tǒng):選擇支持ROS的Linux發(fā)行版,如Ubuntu或Raspbian。
3.安裝ROS:根據(jù)你的樹莓派型號選擇合適的ROS版本,并按照官方指南進(jìn)行安裝。
4.連接外設(shè):通過GPIO、USB等接口連接傳感器、攝像頭等設(shè)備。
5.編寫和運(yùn)行代碼:使用Python或C++編寫ROS節(jié)點(diǎn),并通過ROS命令行工具或IDE運(yùn)行。
樹莓派與ROS的結(jié)合為機(jī)器人開發(fā)帶來了無限可能,但它們也并非萬能。樹莓派的性能瓶頸和可靠性問題需要開發(fā)者在項(xiàng)目中權(quán)衡。如果你的項(xiàng)目需要高性能計(jì)算,可能需要考慮更強(qiáng)大的硬件平臺。但對于初學(xué)者、教育項(xiàng)目或輕量級應(yīng)用,樹莓派與ROS的組合無疑是性價(jià)比極高的選擇。
無論你是機(jī)器人開發(fā)的新手,還是希望在項(xiàng)目中嘗試低成本解決方案的資深開發(fā)者,樹莓派與ROS的組合都值得你一試。讓我們一起探索這個(gè)充滿可能性的世界吧!
-
機(jī)器人
+關(guān)注
關(guān)注
212文章
29029瀏覽量
210132 -
樹莓派
+關(guān)注
關(guān)注
118文章
1871瀏覽量
106237 -
ROS
+關(guān)注
關(guān)注
1文章
283瀏覽量
17332
發(fā)布評論請先 登錄
相關(guān)推薦
靈活易用的樹莓派相機(jī)和計(jì)算機(jī),降低了3D冰川建模的成本!

小身材,大能量:你玩過樹莓派掌機(jī)嘛?





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論