

NVIDIA Isaac GR00T 詳細解析
NVIDIA Isaac GR00T 是英偉達面向人形機器人開發(fā)的核心技術(shù)框架,旨在通過生成式AI、多模態(tài)數(shù)據(jù)融合和仿真技術(shù)加速機器人智能化進程。其核心包括 GR00T Blueprint(開發(fā)藍圖)和 GR00T N1(開源基礎(chǔ)模型)兩大模塊,結(jié)合硬件與生態(tài)支持,推動人形機器人從“任務(wù)專用”邁向“通用智能”。以下是詳細解析:
一、核心組件與技術(shù)架構(gòu)
1. GR00T Blueprint
- 定位:開發(fā)工具鏈,用于生成合成數(shù)據(jù)與構(gòu)建訓練流程。
- 核心功能:
- GR00T-Teleop:基于VR/AR的遠程操控系統(tǒng),通過人類示范生成機器人動作軌跡。支持Apple Vision Pro等設(shè)備,操作者以第一視角控制機器人“化身”,動作捕捉精度達亞毫米級。
- GR00T-Mimic:行為生成引擎,結(jié)合RNN、LSTM、Transformer等模型學習人類動作規(guī)律,并通過圖神經(jīng)網(wǎng)絡(luò)(GNN)優(yōu)化骨骼運動建模,實現(xiàn)復雜動作的自然遷移。
- 合成數(shù)據(jù)生成:依托Omniverse與Cosmos平臺,將人類示范數(shù)據(jù)擴展至指數(shù)級。例如,僅用11小時生成75萬條合成軌跡(相當于9個月的人類數(shù)據(jù)量),結(jié)合真實數(shù)據(jù)后模型性能提升40%。
2. GR00T N1 基礎(chǔ)模型
- 定位:首個開源通用人形機器人“大腦”,支持跨硬件適配。
- 技術(shù)架構(gòu):
3. 配套技術(shù)生態(tài)
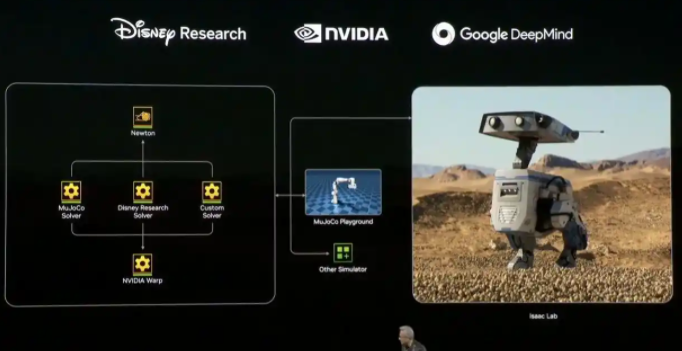
- 物理引擎Newton:與Google DeepMind、Disney聯(lián)合開發(fā),支持高精度剛體/軟體模擬,兼容MuJoCo框架,仿真速度提升70倍。
- 硬件支持:
- Jetson Thor:專為人形機器人設(shè)計的SoC,集成GR00T模型推理能力。
- DGX Spark:個人AI超算,支持大規(guī)模模型訓練與微調(diào)。
二、技術(shù)突破與創(chuàng)新
生成式AI驅(qū)動
- 神經(jīng)軌跡生成:利用視頻生成模型(如SOTA)創(chuàng)建符合物理規(guī)律的合成動作數(shù)據(jù),解決極端場景數(shù)據(jù)匱乏問題。
- 世界基礎(chǔ)模型(WFM):通過Cosmos構(gòu)建虛擬“宇宙”,模擬重力、碰撞等物理規(guī)則,提升機器人對現(xiàn)實世界的泛化理解。
端到端學習框架
- 流匹配(Flow Matching):統(tǒng)一多源數(shù)據(jù)的訓練損失函數(shù),避免傳統(tǒng)強化學習的獎勵函數(shù)設(shè)計復雜性。
- 動作令牌(Action Token):從人類視頻中提取動作模式,結(jié)合逆動力學模型標注無監(jiān)督數(shù)據(jù),提升學習效率。
開源與模塊化
三、應(yīng)用場景與案例
工業(yè)與物流
- 裝配與搬運:比亞迪工廠部署GR00T N1驅(qū)動的機械臂,揀選效率提升30%。
- 動態(tài)避障:凱傲集團AMR通過Isaac Perceptor實現(xiàn)360°障礙檢測,導航成功率超95%。
醫(yī)療與服務(wù)
- 手術(shù)機器人:GR00T-Mimic學習外科醫(yī)生動作,提升微創(chuàng)手術(shù)精度(誤差<0.1mm)。
- 護理機器人:Figure AI模擬醫(yī)院環(huán)境訓練機器人執(zhí)行翻身、喂食等任務(wù)。
人形機器人開發(fā)
- 波士頓動力Atlas:結(jié)合GR00T Blueprint生成合成運動數(shù)據(jù),實現(xiàn)復雜地形自適應(yīng)行走。
- 1X NEO Gamma:通過GR00T N1后訓練,自主完成室內(nèi)清潔、物品整理等多步驟任務(wù)。
四、未來發(fā)展方向
- 多模態(tài)能力增強:整合觸覺、聽覺等多傳感器數(shù)據(jù),提升環(huán)境交互真實性。
- 仿真精度升級:引入光線追蹤與實時天氣系統(tǒng),縮小虛擬與現(xiàn)實的“模擬差距”。
- 低功耗部署:優(yōu)化Jetson系列芯片能效比,適配小型化人形機器人。
- 倫理與安全:開發(fā)安全約束模塊,防止動作越界與數(shù)據(jù)隱私泄露。
總結(jié)
NVIDIA Isaac GR00T 通過 生成式數(shù)據(jù)飛輪 與 雙系統(tǒng)架構(gòu),解決了人形機器人開發(fā)中的數(shù)據(jù)瓶頸與泛化難題。其開源策略與生態(tài)兼容性(如支持ROS 2、HuggingFace)正推動行業(yè)標準化,而跨硬件適配能力則加速了從實驗室到商業(yè)落地的進程。隨著Newton物理引擎與Cosmos平臺的持續(xù)迭代,GR00T有望成為通用機器人時代的“操作系統(tǒng)級”基礎(chǔ)設(shè)施。
如需進一步技術(shù)細節(jié)或代碼實踐,可參考:GR00T N1白皮書 或 GitHub倉庫 。
聲明:本文內(nèi)容及配圖由入駐作者撰寫或者入駐合作網(wǎng)站授權(quán)轉(zhuǎn)載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網(wǎng)立場。文章及其配圖僅供工程師學習之用,如有內(nèi)容侵權(quán)或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
發(fā)布評論請先 登錄
相關(guān)推薦
NVIDIA Isaac GR00T N1的特點和優(yōu)勢
人形機器人需要能夠適應(yīng)人類工作空間,處理重復性或高強度任務(wù)。然而,為真實世界的任務(wù)和不可預(yù)測的環(huán)境創(chuàng)建通用人形機器人是一項挑戰(zhàn)。通常來說,這些任務(wù)中的每一個都需要一個專用的 AI 模型。由于需要大量特定于任務(wù)的數(shù)據(jù)、高昂的計算成本,且模型的泛化能力有限,針對每一個新的任務(wù)和環(huán)境,從零開始訓練這些模型是一個非常繁瑣的過程。

NVIDIA Isaac 是英偉達推出的綜合性機器人開發(fā)平臺
特性、應(yīng)用場景及未來發(fā)展等方面進行詳細解讀: 一、核心組件與功能 NVIDIA Isaac 平臺由多個模塊化組件構(gòu)成,覆蓋從仿真到實際部署的全流程: Isaac Sim 高保真仿真 :
NVIDIA發(fā)布GR00T N1基礎(chǔ)模型等方案,人形機器人開發(fā)效率顯著提升
電子發(fā)燒友網(wǎng)報道(文 / 吳子鵬) 日前,在 NVIDIA 的 GTC 大會上,該公司發(fā)布了一系列助力人形機器人開發(fā)的重要方案,其中包括首個開源人形機器人基礎(chǔ)模型 Isaac GR00T N1
NVIDIA Isaac GR00T N1開源人形機器人基礎(chǔ)模型+開源物理引擎Newton加速機器人開發(fā)
NVIDIA Isaac GR00T N1開源人形機器人基礎(chǔ)模型+開源物理引擎Newton加速機器人開發(fā)
NVIDIA發(fā)布全球首個開源人形機器人基礎(chǔ)模型Isaac GR00T N1
NVIDIA 宣布推出一系列全新技術(shù),助力人形機器人開發(fā)。其中包括全球首個開源且完全可定制的基礎(chǔ)模型NVIDIA Isaac GR00T N1,該模型可賦能通用人形機器人實現(xiàn)推理及各項
機器人Blue亮相 搭載英偉達最新GR00T N1人形機器人通用基礎(chǔ)模型
GR00T N1以及新的數(shù)據(jù)生成和機器人學習框架,我們將共同開啟AI時代的新邊疆。” 黃仁勛還強調(diào)其泛化能力和多任務(wù)執(zhí)行潛力?。 機器人Blue由英偉達公司、谷歌DeepMind、迪士尼聯(lián)合開發(fā),行走動作流暢自然,聲音設(shè)計可愛,具備擬人化交互表現(xiàn)?很好。?機器人Blue基于共同打造的機器人研發(fā)平臺
深度解讀GR00T N1:英偉達開源人形機器人功能模型的技術(shù)革新與行業(yè)影響
GR00T N1 由 NVIDIA 推出,是全球首個開源且完全可定制的通用人形機器人基礎(chǔ)模型。其技術(shù)架構(gòu)受人類認知原理啟發(fā),采用 雙系統(tǒng)協(xié)同設(shè)計 在 NVIDIA ,我們正在開發(fā) AI 解決方案,使
NVIDIA 發(fā)布全球首個開源人形機器人基礎(chǔ)模型 Isaac GR00T N1——并推出加速機器人開發(fā)的仿真框架
18 日 ——NVIDIA 今日宣布推出一系列全新技術(shù),助力人形機器人開發(fā)。其中包括全球首個開源且完全可定制的基礎(chǔ)模型 NVIDIA Isaac GR00T N1,該模型可賦能通用人
發(fā)表于 03-19 09:30
?295次閱讀

智元機器人基于NVIDIA Isaac GR00T打造高效仿真數(shù)據(jù)采集方案
Isaac GR00T 。 NVIDIA Isaac GR00T 加速仿真數(shù)采方案 模仿學習是機器人技術(shù)發(fā)展的關(guān)鍵方向之一,通過觀察和模仿

NVIDIA宣布NVIDIA Isaac重要更新
近期,在備受矚目的2025年國際消費電子展(CES)上,NVIDIA(英偉達)公司宣布了對NVIDIA Isaac平臺的重大更新。這一更新不僅彰顯了NVIDIA在人工智能和機器人技術(shù)領(lǐng)
簡述NVIDIA Isaac的重要更新
在 2025 CES,NVIDIA 宣布了對NVIDIA Isaac的重要更新。NVIDIA Isaac 是一個由加速庫、應(yīng)用框架和 AI

NVIDIA發(fā)布Isaac GR00T Blueprint,加速人形機器人開發(fā)
。 NVIDIA創(chuàng)始人兼首席執(zhí)行官黃仁勛親自揭曉了NVIDIA Isaac GR00T Blueprint的發(fā)布。這一Blueprint旨在加速下一代人形機器人的開發(fā)進程,通過提供機器
NVIDIA推出Isaac GR00T Blueprint
用于合成數(shù)據(jù)的 Isaac GR00T 工作流以及 NVIDIA Cosmos 世界基礎(chǔ)模型,為通用人形機器人的開發(fā)注入強大動力。
NVIDIA發(fā)布人形機器人重磅更新!Isaac GR00T Blueprint厲害在哪?
電子發(fā)燒友網(wǎng)報道(文/吳子鵬)在備受矚目的CES 2025上,NVIDIA在機器人領(lǐng)域宣布了重磅更新——Isaac GR00T Blueprint,幫助開發(fā)者更高效、高質(zhì)量地打造人形機器人。同時

NVIDIA Isaac 機器人平臺利用最新的生成式 AI 和先進的仿真技術(shù),加速 AI 機器人技術(shù)的發(fā)展
觀眾展示了用于人形機器人學習的通用基礎(chǔ)模型 Project GR00T(代表通用機器人 00 技術(shù))。Project GR00T 利用 NVIDIA






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)

評論