 為L3以上的自動駕駛而研發的激光雷達感知系統方案
為L3以上的自動駕駛而研發的激光雷達感知系統方案
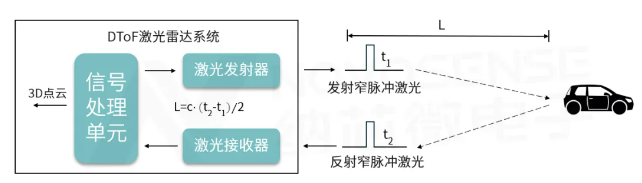
太平洋時間3月26日NVIDIA在美國圣何塞舉辦的GPU技術大會如期而至,在開幕當天,速騰聚創(Robosense)向全球同步正式公開亮相了全新一代P3激光雷達感知方案及相關的路測視頻。
全新一代P3激光雷達感知方案是專門為L3以上的自動駕駛而研發的激光雷達感知系統方案。
該方案在車頂中央使用了一臺32線激光雷達(RS-LiDAR-32)進行全方位的感知,左右兩側各安裝一臺有一定傾斜角的16線激光雷達(RS-LiDAR-16),負責掃除兩側的盲區。算法運行上,該方案可運行在英偉達Drive PX2等平臺上。三臺激光雷達組合方案使得激光雷達點云密度更高,感知盲區更少,可適應L3以上的自動駕駛。該方案經過速騰聚創長時間的開放道路測試驗證,可滿足大部分的自動駕駛路況感知需求。
全新一代P3激光雷達感知方案進行路測
全新的感知升級,為高速自動駕駛測試車而生全新一代P3激光雷達感知方案是速騰聚創在去年推出的“普羅米修斯計劃”的一個方案線延伸(P1方案是指單個16線激光雷達系統解決方案,瞄準低速自動駕駛市場,市場應用很成熟,產品大量應用在像京東、菜鳥等物流車和許多領域的自動駕駛低速車上;P2方案則是指單個32線激光雷達系統解決方案,主要應用于較高速度或者安全性能要求較高的領域。)此次全新一代的P3方案發布,希望能給攜手高速自動駕駛汽車研發團隊,一起推進測試車輛的進展。相比于P1與P2的激光雷達方案,它在硬件與算法上均做了全面升級。在硬件上采用了多臺激光雷達組合的方式,在規避了多雷達互相干擾的前提下,前后向線束密度更大,識別精度高。同時,大幅提升了點云對于盲區的覆蓋,有效地保證乘用車在行車安全和行人保護。在算法方面,在原有的建圖、車道線檢測、路沿檢測、定位、障礙物檢測、動態物體跟蹤、障礙物分類識別模塊基礎上,增加了多激光雷達數據在時間上同步和空間上的融合,提高感知識別的精度和魯棒性,確保自動駕駛車輛能適應更多復雜路況。
全套激光雷達感知方案旨在加速自動駕駛技術研發自動駕駛的實現需要涉及融合不同傳感器感知效果,決策,控制等內容。不同于攝像頭,毫米波雷達等傳感器,激光雷達目前整體感知方案產業鏈并不成熟。業內優秀的研發團隊不僅在融合數據,感知,決策等核心領域投入精力,也被迫拉長戰線,對激光雷達傳感器的功能進行單獨的開發與驗證測試。速騰聚創希望通過提供該套激光雷達硬件及感知算法整體感知系統,讓自動駕駛研發團隊就能夠更加專注在多傳感器融合、決策規劃和控制上,避免更多重復造輪子的工作,攜手加速推動自動駕駛技術的研發。 速騰聚創是全球領先的自動駕駛激光雷達環境感知系統提供商,同時也是全球第一家提供激光雷達感知系統的雷達廠商。我們將繼續為自動駕駛提供優秀的激光雷達軟硬件解決方案,推動自動駕駛產業化落點,讓人們早日獲得更安全快捷的出行體驗。
-
激光雷達
+關注
關注
968文章
3972瀏覽量
189926 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166457
原文標題:感知“升華”:速騰聚創全新一代激光雷達感知方案亮相NVIDIA GTC 2018
文章出處:【微信號:MEMSensor,微信公眾號:MEMS】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
激光雷達在自動駕駛中的應用
激光雷達與純視覺方案,哪個才是自動駕駛最優選?
Mobileye關閉激光雷達研發部門
聊聊自動駕駛離不開的感知硬件
GaN HEMT驅動芯片NSD2017助力解決激光雷達應用挑戰
激光雷達濾光片:自動駕駛的“眼睛之選”

FPGA在自動駕駛領域有哪些應用?
百度蘿卜快跑第六代無人車攜手禾賽AT128激光雷達,共筑自動駕駛新篇章
納芯微GaN HEMT驅動芯片NSD2017在激光雷達中的優勢

阜時科技近期簽訂商用車自動駕駛全固態激光雷達批量訂單
未來已來,多傳感器融合感知是自動駕駛破局的關鍵
康謀方案 | L2進階L3,數據采集如何助力自動駕駛
汽車激光雷達:競爭格局和技術演進






 工商網監
工商網監
評論