") 為工業(yè)機(jī)器人編程的主流離線編程軟件
為工業(yè)機(jī)器人編程的主流離線編程軟件
我們今天講解的重點(diǎn)是離線編程,通過示教在線編程在實際應(yīng)用中主要存在的問題,來說說機(jī)器人離線編程軟件的優(yōu)勢和主流編程軟件的功能、優(yōu)缺點(diǎn)進(jìn)行深度解析。
示教在線編程在實際應(yīng)用中主要存在以下問題:
1、示教在線編程過程繁瑣、效率低。
2、精度完全是靠示教者的目測決定,而且對于復(fù)雜的路徑示教在線編程難以取得令人滿意的效果。
與示教在線編程相比,離線編程又有什么優(yōu)勢呢?
1、減少機(jī)器人的停機(jī)時間,當(dāng)對下一個任務(wù)進(jìn)行編程時,機(jī)器人仍可在生產(chǎn)線上進(jìn)行工作。
2、使編程者遠(yuǎn)離了危險的工作環(huán)境。3、適用范圍廣,可對各種機(jī)器人進(jìn)行編程,并能方便的實現(xiàn)優(yōu)化編程。4、可對復(fù)雜任務(wù)進(jìn)行編程。5、便于修改機(jī)器人程序。
下面詳細(xì)介紹一下主流的離線編程軟件。
1、Robot Master
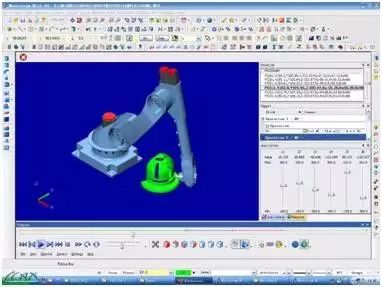
Robotmaster來自加拿大,由上海傲卡自動化公司代理,是目前全球離線編程軟件中頂尖的軟件,幾乎支持市場上絕大多數(shù)機(jī)器人品牌(KUKA,ABB,F(xiàn)anuc,Motoman,史陶比爾、珂瑪、三菱、DENSO、松下……),Robotmaster在Mastercam中無縫集成了機(jī)器人編程、仿真和代碼生成功能,提高了機(jī)器人編程速度。
下圖為Robot Master軟件界面:
優(yōu)點(diǎn):
可以按照產(chǎn)品數(shù)模,生成程序,適用于切割、銑削、焊接、噴涂等等。獨(dú)家的優(yōu)化功能,運(yùn)動學(xué)規(guī)劃和碰撞檢測非常精確,支持外部軸(直線導(dǎo)軌系統(tǒng)、旋轉(zhuǎn)系統(tǒng)),并支持復(fù)合外部軸組合系統(tǒng)。
缺點(diǎn):
暫時不支持多臺機(jī)器人同時模擬仿真(就是只能做單個工作站),基于MasterCAM做的二次開發(fā),價格昂貴,企業(yè)版在20W左右。好貴!!
2、Robot Art
Robot Art來自帝都北京,是目前國內(nèi)品牌離線編程軟件中最頂尖的軟件。
軟件根據(jù)幾何數(shù)模的拓?fù)?a target="_blank">信息生成機(jī)器人運(yùn)動軌跡,之后軌跡仿真、路徑優(yōu)化、后置代碼一氣呵成,同時集碰撞檢測、場景渲染、動畫輸出于一體,可快速生成效果逼真的模擬動畫。廣泛應(yīng)用于打磨、去毛刺、焊接、激光切割、數(shù)控加工等領(lǐng)域。
Robot Art教育版針對教學(xué)實際情況,增加了模擬示教器、自由裝配等功能,幫助初學(xué)者在虛擬環(huán)境中快速認(rèn)識機(jī)器人,快速學(xué)會機(jī)器人示教器基本操作,大大縮短學(xué)習(xí)周期,降低學(xué)習(xí)成本。
下圖為RobotArt離線編程仿真軟件的界面:
優(yōu)點(diǎn):
1)支持多種格式的三維CAD模型,可導(dǎo)入擴(kuò)展名為step、igs、stl、x_t、prt(UG)、prt(ProE)、CATPart、sldpart等格式;
2)支持多種品牌工業(yè)機(jī)器人離線編程操作,如ABB、KUKA、Fanuc、Yaskawa、Staubli、KEBA系列、新時達(dá)、廣數(shù)等;
3)擁有大量航空航天高端應(yīng)用經(jīng)驗;
4)自動識別與搜索CAD模型的點(diǎn)、線、面信息生成軌跡;
5)軌跡與CAD模型特征關(guān)聯(lián),模型移動或變形,軌跡自動變化;
6)一鍵優(yōu)化軌跡與幾何級別的碰撞檢測;
7)支持多種工藝包,如切割、焊接、噴涂、去毛刺、數(shù)控加工;
8)支持將整個工作站仿真動畫發(fā)布到網(wǎng)頁、手機(jī)端。
缺點(diǎn):軟件不支持整個生產(chǎn)線仿真(不夠萬能),對外國小品牌機(jī)器人也不支持,不過作為機(jī)器人離線編程,還是相當(dāng)給力的,功能一點(diǎn)也不輸給國外軟件。
3、Robot Works
RobotWorks是來自以色列的機(jī)器人離線編程仿真軟件,與Robot Master類似,是基于Solidworks做的二次開發(fā)。使用時,需要先購買Solidworks。
功能:
(1)全面的數(shù)據(jù)接口:Robotworks是基于Solidworks平臺開發(fā),Solidworks可以通過IGES,DXF,DWG,PrarSolid,Step,VDA,SAT等標(biāo)準(zhǔn)接口進(jìn)行數(shù)據(jù)轉(zhuǎn)換。
(2)強(qiáng)大的編程能力:從輸入CAD數(shù)據(jù)到輸出機(jī)器人加工代碼只需四步。
第一步:從Solidworks直接創(chuàng)建或直接導(dǎo)入其他三維CAD數(shù)據(jù),選取定義好的機(jī)器人工具與要加工的工件組合成裝配體。所有裝配夾具和工具客戶均可以用Solidworks自行創(chuàng)建調(diào)用;
第二步:Robotworks選取工具,然后直接選取曲面的邊緣或者樣條曲線進(jìn)行加工產(chǎn)生數(shù)據(jù)點(diǎn);
第三步:調(diào)用所需的機(jī)器人數(shù)據(jù)庫,開始做碰撞檢查和仿真,在每個數(shù)據(jù)點(diǎn)均可以自動修正,包含工具角度控制,引線設(shè)置,增加減少加工點(diǎn),調(diào)整切割次序,在每個點(diǎn)增加工藝參數(shù);
第四步:Robotworks自動產(chǎn)生各種機(jī)器人代碼,包含笛卡爾坐標(biāo)數(shù)據(jù),關(guān)節(jié)坐標(biāo)數(shù)據(jù),工具與坐標(biāo)系數(shù)據(jù),加工工藝等,按照工藝要求保存不同的代碼。
(3)強(qiáng)大的工業(yè)機(jī)器人數(shù)據(jù)庫:系統(tǒng)支持市場上主流的大多數(shù)的工業(yè)機(jī)器人,提供各大工業(yè)機(jī)器人各個型號的三維數(shù)模。
(4)完美的仿真模擬:獨(dú)特的機(jī)器人加工仿真系統(tǒng)可對機(jī)器人手臂,工具與工件之間的運(yùn)動進(jìn)行自動碰撞檢查,軸超限檢查,自動刪除不合格路徑并調(diào)整,還可以自動優(yōu)化路徑,減少空跑時間。
(5)開放的工藝庫定義:系統(tǒng)提供了完全開放的加工工藝指令文件庫,用戶可以按照自己的實際需求自行定義添加設(shè)置自己獨(dú)特工藝,添加的任何指令都能輸出到機(jī)器人加工數(shù)據(jù)里面。
優(yōu)點(diǎn):
生成軌跡方式多樣、支持多種機(jī)器人、支持外部軸。
缺點(diǎn):
Robotworks基于solidworks,solidworks本身不帶CAM功能,編程繁瑣,機(jī)器人運(yùn)動學(xué)規(guī)劃策略智能化程度低。不會用sw,只會用UG,PROE......咋整?
4、Robcad
ROBCAD是西門子旗下的軟件,軟件較龐大,重點(diǎn)在生產(chǎn)線仿真,價格也是同軟件中最貴的。軟件支持離線點(diǎn)焊、支持多臺機(jī)器人仿真、支持非機(jī)器人運(yùn)動機(jī)構(gòu)仿真,精確的節(jié)拍仿真,ROBCAD主要應(yīng)用于產(chǎn)品生命周期中的概念設(shè)計和結(jié)構(gòu)設(shè)計兩個前期階段。現(xiàn)已被西門子收購!
功能:
(1)Workcelland Modeling:對白車身生產(chǎn)線進(jìn)行設(shè)計、管理和信息控制。(2)Spotand OLP:完成點(diǎn)焊工藝設(shè)計和離線編程。(3)Human:實現(xiàn)人因工程分析。(4)Application中的Paint、Arc、Laser等模塊:實現(xiàn)生產(chǎn)制造中噴涂,弧焊,激光加工,緄邊等等工藝的仿真驗證及離線程序輸出。(5)ROBCAD的Paint模塊。噴漆的設(shè)計、優(yōu)化和離線編程,其功能包括:噴漆路線的自動生成、多種顏色噴漆厚度的仿真、噴漆過程的優(yōu)化。
優(yōu)點(diǎn):
(1)與主流的CAD軟件(如NX、CATIA、IDEAS)無縫集成。
(2)實現(xiàn)工具工裝、機(jī)器人和操作者的三維可視化。
(3)制造單元、測試以及編程的仿真。
缺點(diǎn):
價格昂貴,離線功能較弱,Unix移植過來的界面,人機(jī)界面不友好。而且已經(jīng)不再更新!
下圖為ROBCAD軟件界面:

5、DELMIA
汽車行業(yè)都是用的DELMIA哦!
DELMIA是達(dá)索旗下的CAM軟件,大名鼎鼎的CATIA也是達(dá)索旗下的CAD軟件。DELMIA有6大模塊,其中Robotics解決方案涵蓋汽車領(lǐng)域的發(fā)動機(jī)、總裝和白車身(Body-in-White),航空領(lǐng)域的機(jī)身裝配、維修維護(hù),以及一般制造業(yè)的制造工藝。
DELMIA的機(jī)器人模塊ROBOTICS是一個可伸縮的解決方案,利用強(qiáng)大的PPR集成中樞快速進(jìn)行機(jī)器人工作單元建立、仿真與驗證,是一個完整的、可伸縮的、柔性的解決方案。
優(yōu)點(diǎn):
(1)從可搜索的含有超過400種以上的機(jī)器人的資源目錄中,下載機(jī)器人和其它的工具資源。
(2)利用工廠布置規(guī)劃工程師所完成的工作。
(3)加入工作單元中工藝所需的資源進(jìn)一步細(xì)化布局。
缺點(diǎn):
DELMIA屬于專家型軟件,操作難度較高。
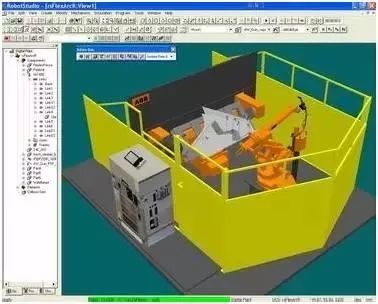
6、RobotStudio
RobotStudio是瑞士ABB公司配套的軟件,是機(jī)器人本體商中軟件做的最好的一款。RobotStudio支持機(jī)器人的整個生命周期,使用圖形化編程、編輯和調(diào)試機(jī)器人系統(tǒng)來創(chuàng)建機(jī)器人的運(yùn)行,并模擬優(yōu)化現(xiàn)有的機(jī)器人程序。
優(yōu)點(diǎn):
(1)CAD導(dǎo)入方便。可方便地導(dǎo)入各種主流CAD格式的數(shù)據(jù),包括IGES、STEP、VRML、VDAFS、ACIS及CATIA等。
(2)Auto Path功能。該功能通過使用待加工零件的CAD模型,僅在數(shù)分鐘之內(nèi)便可自動生成跟蹤加工曲線所需要的機(jī)器人位置(路徑),而這項任務(wù)以往通常需要數(shù)小時甚至數(shù)天。
(3)程序編輯器。可生成機(jī)器人程序,使用戶能夠在Windows環(huán)境中離線開發(fā)或維護(hù)機(jī)器人程序,可顯著縮短編程時間、改進(jìn)程序結(jié)構(gòu)。
(4)路徑優(yōu)化。如果程序包含接近奇異點(diǎn)的機(jī)器人動作,RobotStudio可自動檢測出來并發(fā)出報警,從而防止機(jī)器人在實際運(yùn)行中發(fā)生這種現(xiàn)象。仿真監(jiān)視器是一種用于機(jī)器人運(yùn)動優(yōu)化的可視工具,紅色線條顯示可改進(jìn)之處,以使機(jī)器人按照最有效方式運(yùn)行。可以對TCP速度、加速度、奇異點(diǎn)或軸線等進(jìn)行優(yōu)化,縮短周期時間。
(5)可達(dá)性分析。通過Autoreach可自動進(jìn)行可到達(dá)性分析,使用十分方便,用戶可通過該功能任意移動機(jī)器人或工件,直到所有位置均可到達(dá),在數(shù)分鐘之內(nèi)便可完成工作單元平面布置驗證和優(yōu)化。
(6)虛擬示教臺。是實際示教臺的圖形顯示,其核心技術(shù)是Virtual Robot。從本質(zhì)上講,所有可以在實際示教臺上進(jìn)行的工作都可以在虛擬示教臺(QuickTeach?)上完成,因而是一種非常出色的教學(xué)和培訓(xùn)工具。
(7)事件表。一種用于驗證程序的結(jié)構(gòu)與邏輯的理想工具。程序執(zhí)行期間,可通過該工具直接觀察工作單元的I/O狀態(tài)。可將I/O連接到仿真事件,實現(xiàn)工位內(nèi)機(jī)器人及所有設(shè)備的仿真。該功能是一種十分理想的調(diào)試工具。
(8)碰撞檢測。碰撞檢測功能可避免設(shè)備碰撞造成的嚴(yán)重?fù)p失。選定檢測對象后,RobotStudio可自動監(jiān)測并顯示程序執(zhí)行時這些對象是否會發(fā)生碰撞。
(9)VBA功能。可采用VBA改進(jìn)和擴(kuò)充RobotStudio功能,根據(jù)用戶具體需要開發(fā)功能強(qiáng)大的外接插件、宏,或定制用戶界面。
(10)直接上傳和下載。整個機(jī)器人程序無需任何轉(zhuǎn)換便可直接下載到實際機(jī)器人系統(tǒng),該功能得益于ABB獨(dú)有的Virtual Robot技術(shù)。
缺點(diǎn):
就是只支持ABB品牌機(jī)器人,機(jī)器人間的兼容性很差。集成商可不能只做ABB的項目!
下圖為Robot Studio軟件界面:
7、Robomove
Robomove來自意大利,同樣支持市面上大多數(shù)品牌的機(jī)器人,機(jī)器人加工軌跡由外部CAM導(dǎo)入。
優(yōu)點(diǎn):
1.與其他軟件不同的是,Robomove走的是私人定制路線,根據(jù)實際項目進(jìn)行定制。
2.軟件操作自由,功能完善,支持多臺機(jī)器人仿真。
缺點(diǎn):
需要操作者對機(jī)器人有較為深厚的理解,策略智能化程度與Robotmaster有較大差距。
8、其他
安川的motosim,kuka的simpro,發(fā)那科的robguide,其他國產(chǎn)軟件也在陸續(xù)開發(fā)中。
-
編程
+關(guān)注
關(guān)注
88文章
3616瀏覽量
93738 -
工業(yè)機(jī)器人
+關(guān)注
關(guān)注
91文章
3363瀏覽量
92656
原文標(biāo)題:深度剖析七大工業(yè)機(jī)器人離線編程軟件
文章出處:【微信號:indRobot,微信公眾號:工業(yè)機(jī)器人】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
安川工業(yè)機(jī)器人結(jié)構(gòu)

歐姆龍協(xié)作機(jī)器人TM25S可使用多種方法進(jìn)行編程

焊接機(jī)器人編程技巧與注意事項
愛普生SG-8101CA可編程晶振應(yīng)用在工業(yè)自動化機(jī)器人

國產(chǎn)可編程硅振在機(jī)器人伺服系統(tǒng)中的應(yīng)用,替換SiTime

工業(yè)機(jī)器人編程流程及注意事項
工業(yè)機(jī)器人常用的編程方式
工業(yè)機(jī)器人的四種編程(示教編程、離線編程、自增強(qiáng)現(xiàn)實編程主編程)剖析!

工業(yè)機(jī)器人任務(wù)編程基本流程
如何使用PLC控制機(jī)器人
工業(yè)機(jī)器人仿真軟件有哪些
abb工業(yè)機(jī)器人的編程語言是什么

富唯智能,自研機(jī)器人規(guī)劃軟件 ForwardViz #人工智能 #機(jī)械制造 #機(jī)器人編程 #工業(yè)軟件
工業(yè)機(jī)器人連接解決方案

ABB機(jī)器人拓展其免費(fèi)的Wizard簡易編程軟件的應(yīng)用范圍






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論