 手機攝像頭組成結構與原理
手機攝像頭組成結構與原理
19世紀初夏普與當時的日本通信運營商J-PHONE發明了夏普 J-SH04,夏普 J-SH04具有拍照功能,2003年4月24日夏普發售了全球首款百萬像素手機J-SH53,風靡一時。
隨著技術的不斷突破與革新,新型照相鏡頭如雨后春筍一樣,不斷出現,從最初的百萬到現在的千萬緊緊用了十余年的時間,拍攝質量不斷進入新臺階。最具有代表的如華為、三星、蘋果等公司,華為從p6開始鏡頭與處理芯片突飛猛進,新的設計理念不斷應用于實踐,比如在年前還是理論的雙攝像頭設計,目前已經被三星,華為掌握,紛紛用于最新上市手機。
目前市面上的手機通常都具有前后攝像頭,前面一般在500萬左右,用來自拍和視頻通話,后置一般在1300萬左右,可以照出更加清晰的圖片和錄制清晰視頻。
手機攝像頭組成結構
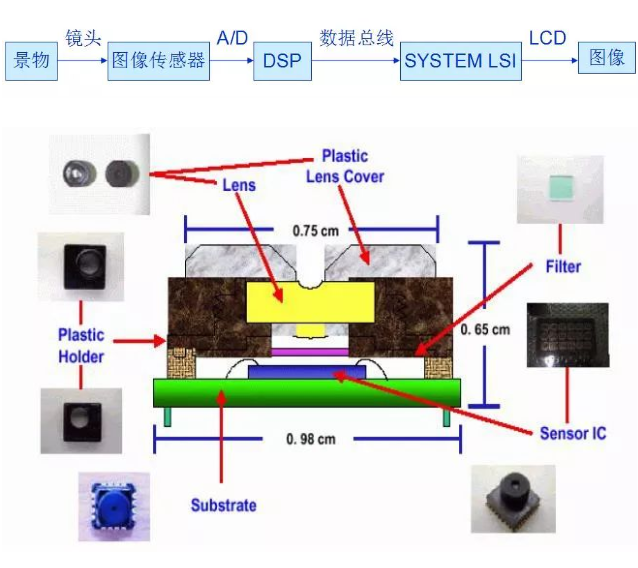
手機攝像頭主要由以下幾個部分組成:PCB板、DSP(CCD用)、傳感器(SENSOR)、固定器(HOLDER)、鏡頭(LENS ASS′Y)。其中鏡頭(LENS ASS′Y), DSP(C,CD用),傳感器(SENSOR)是最重要的三個部分。


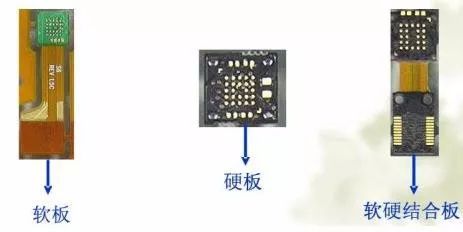
PCB板
PCB板又分為硬板,軟板,軟硬結合板三種(如下圖),CMOS可用任何一種板,但CCD的話就只能用軟硬結合板。這三種板中軟硬結合板價格最高,而硬板價格最低。
鏡頭
鏡頭是僅次于CMOS芯片影響畫質的第二要素,其組成是透鏡結構,由幾片透鏡組成,一般可分為塑膠透鏡(plastic)或玻璃透鏡(glass)。當然,所謂塑膠透鏡也非純粹塑料,而是樹脂鏡片,當然其透光率感光性之類的光學指標是比不上鍍膜鏡片的。
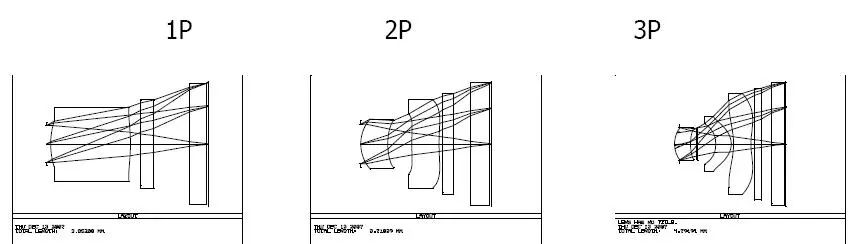
通常攝像頭用的鏡頭構造有:
1P、2P、1G1P、1G2P、2G2P、2G3P、4G、5G等。透鏡越多,成本越高,相對成像效果會更出色;而玻璃透鏡又比樹脂貴。因此一個品質好的攝像頭應該是采用多層玻璃鏡頭!現在市場上的多數攝像頭產品為了降低成本,一般會采用廉價的塑膠鏡頭或一玻一塑鏡頭(即:1P、2P、1G1P、1G2P等),對成像質量有很大影響!
鏡頭由透鏡、濾光裝置、鏡筒三部分組成,鏡頭參數有三個,即焦距f′、相對孔徑D/f′和視場角2ω。
鏡頭焦距是鏡頭的一個重要指標,決定了物和像的比例,如物在無限遠,像的大小由下式決定y′=-f′·tanω(ω是物方視場角)。
相對孔徑D/f'和光圈數F是鏡頭的關鍵光學指標。相對孔徑,它表示能進入鏡頭到達底片上的光能量,因而決定像平面照度,其定義為入瞳直徑D與鏡頭焦距f'之比,暗景物和高速運動物體的照相需要大相對孔徑物鏡,大相對孔徑物鏡可以提高像平面照度,根據相對孔徑大小,照相物鏡分為弱光照物鏡(D/f'1:6.3以下)普通物鏡(D/f'1:5.6-1:3.5)強光物鏡(D/f'1:2.8-1:1.4)超強光物鏡(D/f'1:1-1:0.8)為了使同一鏡頭使用不同的環境,通常孔徑光闌采用可連續變化的可變光闌。
相對孔徑的倒數稱為光圈系數,又稱F數,照相鏡頭上標有F數,國家標準按照光通量的大小規定了各光級圈數的排列
0.7、1、1.4、2、2.8、4、5.6、8、11、16、22···隨著光圈數的加大,光孔變小,光通量減少,光圈每差一級,光通量相差一倍,對照相機鏡頭來說,F數越低,鏡頭相容性就愈好,使用范圍更大。相對孔徑還影響像面上獲得清晰像的空間深度范圍-景深,相對孔徑越大,成像的景深越大,照相過程中調節光圈大小控制景深。
視場角2ω照相物鏡的視場角2ω決定了物方空間的范圍,照相物鏡的視場由像平面上具有滿意成像質量的圓形區域的直徑決定,或由相機所采用感光元件的感光面尺寸決定。
照相物鏡的基本類型:1、.按鏡頭焦距和視場角分為:標準鏡頭、短焦鏡頭、長焦鏡頭。2、按鏡頭焦距能否變化分為:定焦鏡頭、變焦鏡頭。
固定器和濾色片
固定器的作用,實際上就是來固定鏡頭,另外固定器上還會有一塊濾色片。
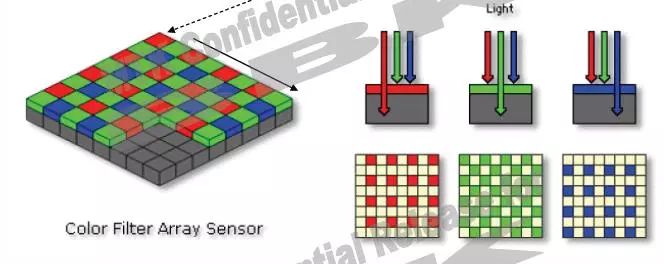
濾色片也即“分色濾色片”,目前有兩種分色方式,一種是RGB原色分色法,另一種是CMYK補色分色法。
原色CCD的優勢在于畫質銳利,色彩真實,但缺點則是噪聲問題,一般采用原色CCD的數碼相機,ISO感光度多半不會超過400。相對的,補色CCD多了一個Y黃色濾色器,犧牲了部分影像的分辨率,但ISO值一般都可設定在800以上。
DSP(數字信號處理芯片)
它的功能是通過一系列復雜的數學算法運算,對數字圖像信號進行優化處理,最后把處理后的信號傳到顯示器上。
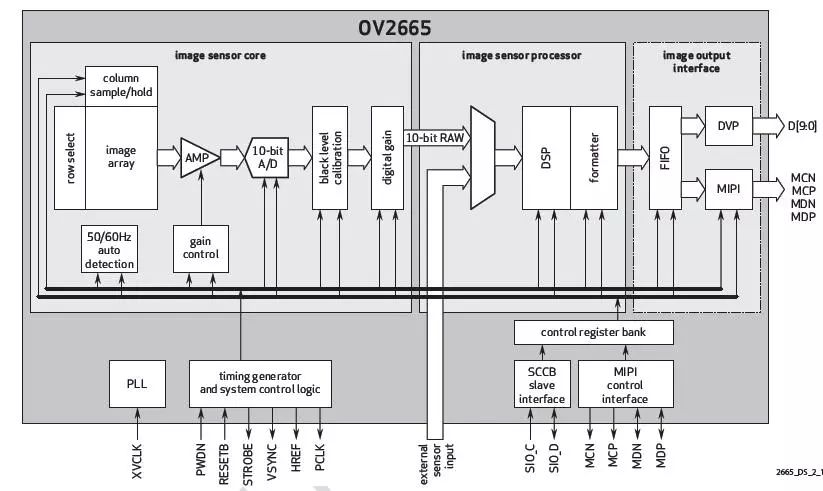
DSP結構框架:(1). ISP(image signal processor)(鏡像信號處理器);(2). JPEG encoder(JPEG圖像解碼器)。
ISP的性能強大是決定影像流暢的關鍵,JPEG encoder的性能也是關鍵指標之一。而JPEG encoder又分為硬件JPEG壓縮方式,和軟件RGB壓縮方式。
DSP控制芯片的作用是:將感光芯片獲取的數據及時快速地傳到baseband中并刷新感光芯片,因此控制芯片的好壞,直接決定畫面品質(比如色彩飽和度、清晰度)與流暢度。
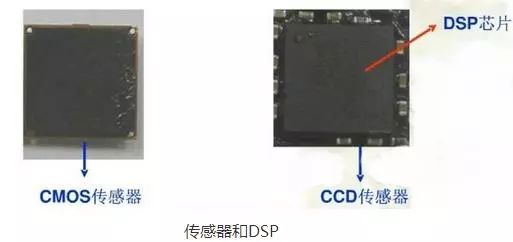
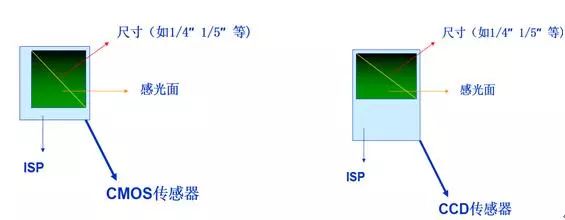
上面所說的DSP是CCD中會使用,是因為,在CMOS傳感器的攝像頭中,其DSP芯片已經集成到CMOS中,從外觀上來看,它們就是一個整體。而采用CCD傳感器的攝像頭則分為CCD和DSP兩個獨立部分。
在攝像頭的主要組件中,最重要的就是圖像傳感器了,因為感光器件對成像質量的重要性不言而喻。
傳感器將從鏡頭上傳導過來的光線轉換為電信號,再通過內部的DA轉換為數字信號。由于傳感器的每個pixel只能感光R光或者B光或者G光,因此每個像素此時存貯的是單色的,我們稱之為RAW DATA數據。要想將每個像素的RAW DATA數據還原成三基色,就需要信號處理器ISP來處理。
圖像傳感器是起感光記錄作用的元件,和膠卷類似。有CMOS和CCD兩種類型CCD又叫電荷轉移器件,光電二極管排成一列叫一維型直線式傳感器,光電二極管行排列叫二維型面積式圖像傳感器。
CCD由光電二極管感光部件、ccd轉移部件和電荷放大器件組成,當光照射時,光子激發電荷,電荷產生堆積,感光部件與轉移部件之間加上柵電壓,堆積的電荷在柵電壓的作用下,開始定向移動至轉移部件,經放大輸出,這些輸出的電荷信號帶有圖像信息。
圖像傳感器的發展趨勢是高敏感化、高分辨率、省電、低壓工作等高性能方向發展。
CMOS圖像傳感器由金屬氧化物半導體集合而成,每一個像素可以集成多種器件,比如放大器,A/D轉換器等。
兩種感光元件的不同之處:
CCD成像質量好,但是制作起來比較復雜,而且耗能大,CMOS雖然成像質量較差,但是驅動電壓低,制造簡單,CMOS可以和其他器件集成,每一個像素都可以實現完整的功能,相比CCD是成千上萬個像素排列,每一個像素激發的電荷匯集到一起,運輸到放大器和數據處理器,這樣給后續處理增加不少負擔,而且大量的電荷匯集,也給通道提出了更高的要求,在技術上出現了瓶頸,CMOS中每個像素單獨完成信號放大和信號處理工作,這些特點,造成CMOS噪聲較大。如果CMOS克服噪聲大的缺點,提高成像質量,CMOS就會超越CCD,成為圖像傳感器的首選。
有的廠家在宣傳中會提到“背照式”“BSI”等概念,實際上BSI就是背照式CMOS的英文簡稱,背照式CMOS是CMOS的一種,它改善了傳統CMOS感光元件的感光度,在夜拍和高感的時候成像效果相對好一些。
手機攝像頭的成像原理
物方光線進入系統,經過鏡頭,到達圖像傳感器,光子打到傳感器上產生可移動電荷,這是內光電效應,可移動電荷匯集形成電信號,由于處理器無法識別電荷信號,需要把電信號轉化為數字信號,對于圖像傳感器是cmos的系統不需要外加模數轉換器,而對于以ccd作為圖像傳感器的系統需要A/D轉換器,經過模數轉換器件,電荷信號轉換成數字信號,數字信號經過放大電路進入微處理器,數字信號經過DSP數字信號處理芯片經過存儲處理后,傳輸到屏幕形成和物一樣的圖像。
影響手機攝像頭性能的一些關鍵因素
像素
通常所說的“XXX萬像素”實際是指相機的分辨率,其數值大小主要由相機傳感器中的像素點(即最小感光單位)數量決定,例如500萬像素就意味著傳感器中有500萬個像素點,和手機屏幕中的像素數量決定屏幕是720p或1080p分辨率是一個道理。
像素決定照片質量?
通常會以為相機像素越高,拍的照片就越清晰,實際上。相機的像素唯一能決定的是其所拍圖片的分辨率,而圖片的分辨率越高,只代表了圖片的尺寸越大,并不能說明圖片越清晰。
但是當前主流的手機屏幕為1080p級別(1920×1080像素),無論是1300萬像素相機所得的4208×3120像素照片,還是800萬像素攝像頭的3200×2400像素照片,都超出了1080p屏的解讀范圍,最終都會以1920×1080像素顯示,所以肉眼所看到的清晰度也是沒有區別的。
高像素的優勢在哪里呢?
更高像素的相機所拍圖片的尺寸更大,假如我們想把樣張打印出來,以常規的300像素/英寸的打印標準來計算,1300萬像素相機所拍的4208×3120像素樣張,可打印17英寸照片,而800萬像素相機的3200×2400像素樣張,打印超過13英寸的照片就開始模糊了。很顯然1300萬像素相機樣張可打印的尺寸更大。
傳感器
既然像素不是決定圖片質量的關鍵因素,那么誰才是呢?答案是傳感器。
相機傳感器主要分兩種:CCD和CMOS。CCD傳感器雖然成像質量好,但是成本較高,并不適用于手機,而CMOS傳感器憑借著較低的功耗和價格以及優異的影像品質,在手機領域應用最為廣泛。
CMOS傳感器又分為背照式和堆棧式兩種,二者系出同門,技術最早都由索尼研發,索尼背照式傳感器品牌名為“Exmor R”,堆棧式傳感器為“Exmor RS”。
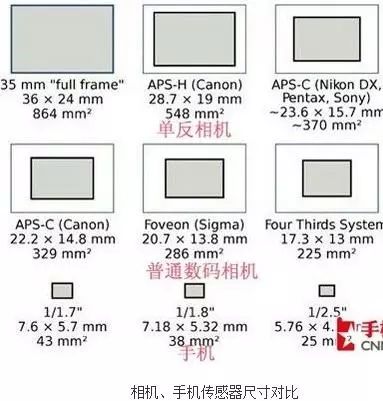
相對來說,傳感器尺寸越大,感光性能越好,捕捉的光子(圖形信號)越多,信噪比越低,成像效果自然也越出色,然而更大的傳感器卻會導致手機的體積、重量、成本增加。
背照式傳感器的出現,有效的解決了這個問題,在相同尺寸下,它使傳感器感光能力提升了100%,有效地改善了在弱光環境下的成像質量。
2012年8月,索尼發布了全新堆棧式傳感器(Exmor RS CMOS),需要注意的是,它和背照式傳感器并非演進關系,而是并列關系,堆棧式傳感器的主要優勢是在像素數保持不變的情況下,讓傳感器尺寸變得更小,也可以理解為,在與背照式傳感器的像素數相同時,堆棧式傳感器的尺寸會更小,從而節省了空間,讓手機變得更薄、更輕。
鏡頭
鏡頭是將拍攝景物在傳感器上成像的器件,相當于相機的“眼睛”,通常由由幾片透鏡組成,光線信號通過時,鏡片們會層層過濾雜光(紅外線等),所以,鏡頭片數越多,成像就越真實。
光圈
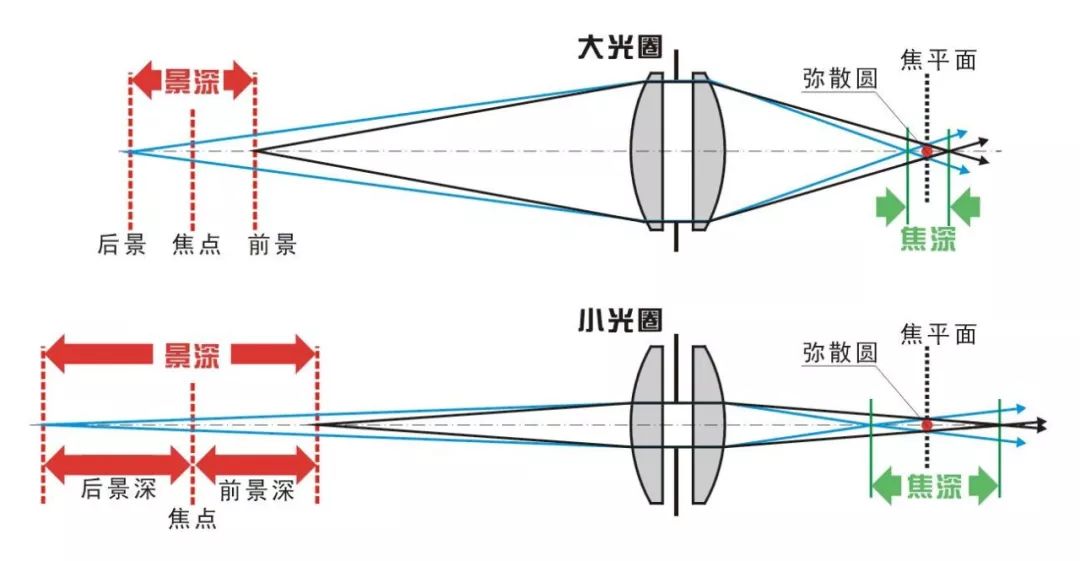
光圈由鏡頭中幾片極薄的金屬片組成,可以通過改變光圈孔的大小控制進入鏡頭到達傳感器的光線量。光圈的值通常用f/2.2、f/2.4來表示,數字越小,光圈就越大,兩者成反比例關系。
它的工作原理是,光圈開得越大,通過鏡頭到達傳感器的光線就越多,成像畫面就越明亮,反之畫面就越暗。因此,在夜拍或暗光環境下,大光圈的成像優勢就更明顯。
除了控制通光量,光圈還具有控制景深的功能。生活中,我們時常會看到背景虛化效果很強的照片,不僅突出了拍攝焦點,還具有很唯美的藝術感,而這就是所謂的景深。光圈開的越大,景深越小,背景虛化效果就更明顯。
-
dsp
+關注
關注
553文章
7998瀏覽量
348945 -
PCB板
+關注
關注
27文章
1448瀏覽量
51650 -
攝像頭
+關注
關注
60文章
4841瀏覽量
95704
原文標題:科普:手機攝像頭技術結構與原理
文章出處:【微信號:WW_CGQJS,微信公眾號:傳感器技術】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
回收手機攝像頭專業優勢收購手機攝像頭
回收手機攝像頭 收購手機攝像頭
回收手機攝像頭,收購攝像頭芯片
專業回收手機攝像頭 收購手機攝像頭價格高
手機攝像頭組成結構及手機攝像頭的成像原理
手機攝像頭結構分析及測試中彈片微針模組的優勢
手機攝像頭的結構和影響手機拍照質量的因素分析
手機攝像頭組成結構


手機攝像頭的組成結構及成像原理






 工商網監
工商網監
評論