 RobotStudio的介紹以及ABB機器人的位置及速度概述
RobotStudio的介紹以及ABB機器人的位置及速度概述
RobotStudio是ABB機器人的離線仿真調試軟件,還可支持VR體驗。
今天就來好好介紹一下這款ABB機器人的專屬強大軟件!
1
支持所有ABB機器人模型以及變位機,導軌等。
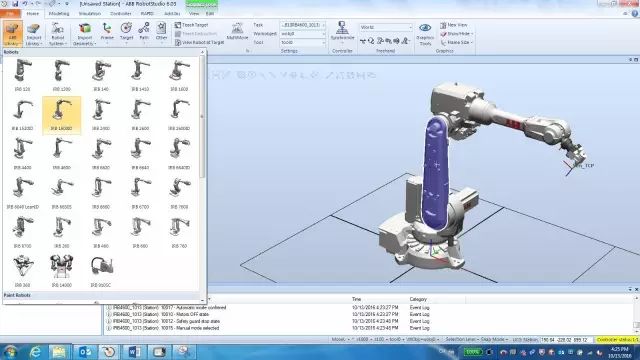
2
完全和現場實際應用一樣的示教器操作,機器人運動仿真與真實一致,真正可以做到在RobotStudio里所見即真實環境所得。

3
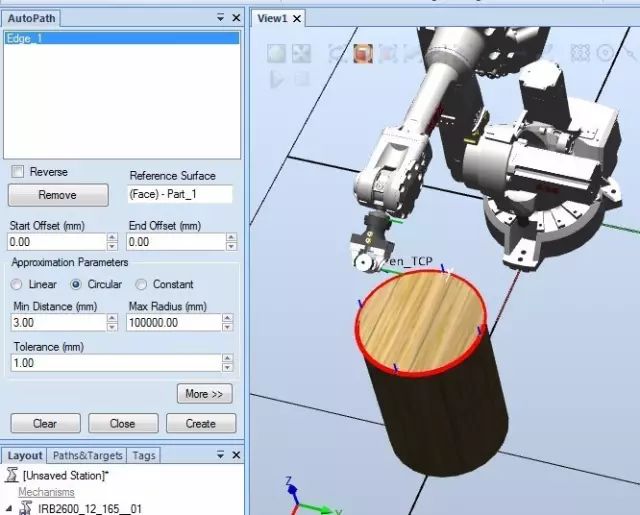
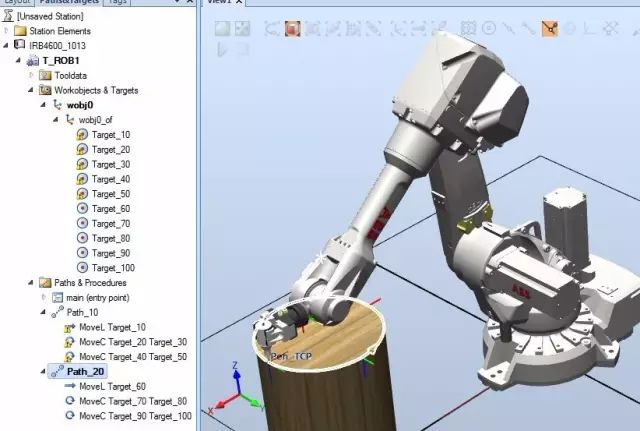
豐富的離線軌跡自動生成功能,支持多種數模導入,機器人軌跡自動生成,免去人工現場調試帶來的繁重重復工作。
4
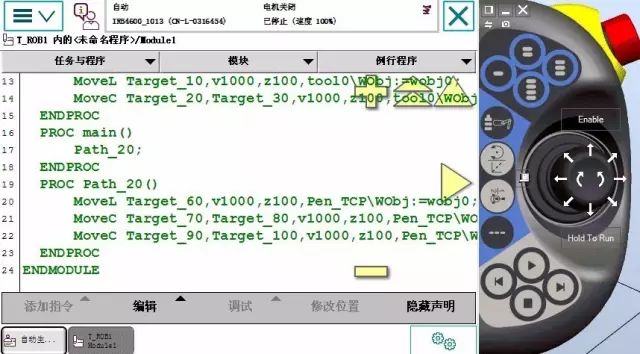
簡介高效的代碼調試環境
5
豐富的powerpac(RobotStudio插件)功能,針對不同行業,快速解決機器人軌跡生成,編程問題等。比如Machining Powerpac,針對如下軌跡應用快捷方便。
6
機器人的位置及速度和我們一般理解的位置和速度可是有些不同的哦~
1. ABB 機器人中用來表示位置的數據類型是:
Robtarget 用于定義移動機械臂和附加軸的移動指令中的位置。
jointtarget 用于確定通過指令MoveAbsJ 而將機械臂和外軸移動到的位置。
2. ABB 機器人中用來表示速度的數據類型是:
Speeddata 用于規定機械臂和外軸均開始移動時的速率。
3. robtarget 的構成部分如下。
v_tcp 用mm 來表示工具中心點的位置(x、y 和z)。規定相對于當前目標坐標系的位置,包括程序位移。如果未規定任何工件,則為世界坐標系。
v_ori 工具方位,以四元數的形式表示(q1、q2、q3 和q4)。
v_leax 機械臂的軸配置(cf1、cf4、cf6 和cfx)。
v_reax 附加軸的位置。
4. jointtarget 的構成部分如下。
robax 機械臂軸的軸位置,以度數計。
extax 外軸的位置。對于旋轉軸,其位置定義為從校準位置起旋轉的度數。對于線性軸,其位置定義為與校準位置的距離(以mm 計)。未定義的外軸,值9E9
5. speeddata 的構成部分如下:
v_tcp 工具中心點的速率,以mm/s 計
v_ori TCP 的重新定位速率,以度/秒表示。
v_leax 線性外軸的速率,以mm/s 計。
v_reax 旋轉外軸的速率,以度/秒計。
-
ABB機器人
+關注
關注
15文章
89瀏覽量
13507 -
RobotStudio
+關注
關注
4文章
10瀏覽量
5648
原文標題:RobotStudio你知道多少?以及ABB機器人系統中的位置及速度
文章出處:【微信號:GKYXT1508,微信公眾號:工控云學堂】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
ABB IRB5400-噴涂工業機器人
零基礎玩轉工業機器人
ABB機器人維修保養指南
ABB焊接機器人伺服電機維修常見故障相關資料分享
ABB焊接機器人伺服電機維修常見故障相關資料分享
工業機器人仿真與編程
工業機器人虛擬仿真軟件是一個很好的工業機器人入門途徑
ABB機器人的RobotStudio操作手冊免費下載

ABB機器人的IRC5和RobotStudio入門手冊免費下載

ABB機器人線速度_青島ABB機器人發生電源故障維修






 工商網監
工商網監
評論