") 一種軟性3D打印介電彈性體制動器的原型-
一種軟性3D打印介電彈性體制動器的原型-
據(jù)外媒報道,美國陸軍研究實驗室和明尼蘇達(dá)大學(xué)已聯(lián)手開發(fā)可在戰(zhàn)場上3D打印并用于可在密閉空間內(nèi)輕松移動的機器人的柔性材料,就像魷魚等無脊椎動物可能通過水下巖石洞的方式。
目前的軍事機器人不能在人口稠密的環(huán)境中自由移動,因為它們是由剛性機械部件制成的。
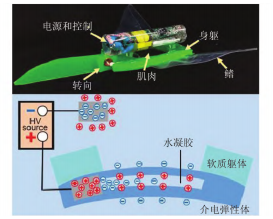
然而,現(xiàn)在這種情況可能會改變,因為研究人員最近開發(fā)出了一種軟性3D打印介電彈性體制動器的原型- 一種電活性聚合物,當(dāng)電荷撞擊時會改變形狀。 這種3D打印的制動器可以進行極端的彎曲運動,這意味著它可以用于穿過人類無法操縱的空間。
研究人員在本月通過《Science Direct》雜志詳細(xì)解釋了他們的發(fā)現(xiàn) 。 據(jù)研究非線性結(jié)構(gòu)動力學(xué)的ARL研究員Ed Habtour解釋,研究人員還希望將這些軟體機器人設(shè)計為有自我意識、自我感知和能夠調(diào)整自身形狀以適應(yīng)不同的外部和內(nèi)部條件的機器人。
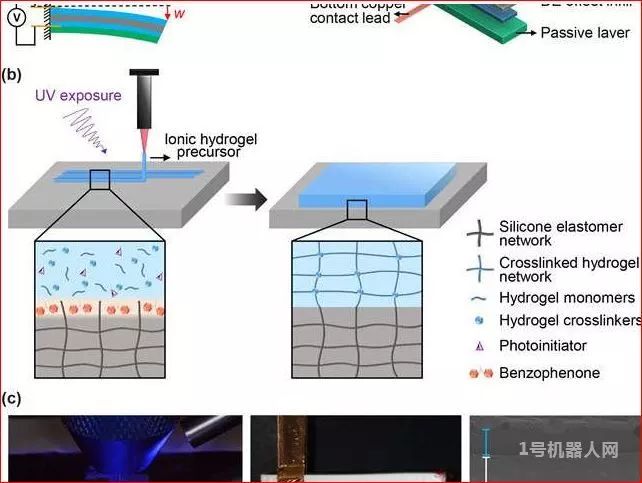
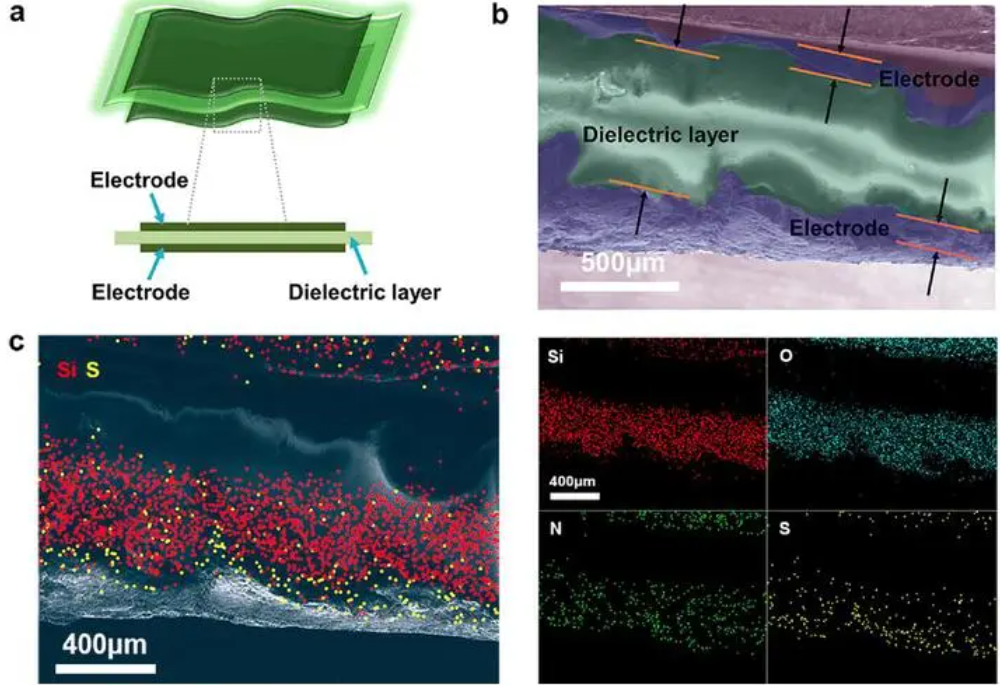
(a)軟驅(qū)動裝置的示意圖(左)和裝置和構(gòu)成材料層(右)的分解圖。 (b)在表面處理和UV光暴露后在硅氧烷層的表面上沉積(3D打印)水凝膠的示意圖。 (c)在表面處理(左),最終的3D打印DEA(中)以及器件橫截面(右)的微結(jié)構(gòu)圖像之后在被動層上印刷離子水凝膠。
這不是科學(xué)家第一次受動物啟發(fā)研發(fā)機器人。2016年,哈佛大學(xué)的研究人員構(gòu)建了一款名為Octobot 的軟性機器人,該機器人完全由柔性部件制成,并受到現(xiàn)實生活章魚的啟發(fā)。 這個微小的機器人的柔軟觸手通過特定的化學(xué)反應(yīng)移動,將過氧化氫轉(zhuǎn)化為氣體流入Octobot的手臂,像氣球一樣膨脹。
同樣在2016年,凱斯西儲大學(xué)的另一組研究人員利用海參的肌肉組織與柔性3D打印聚合體結(jié)合創(chuàng)建了一款機器人。這些機器人可用于海洋監(jiān)視和搜索任務(wù)。
2015年,美國宇航局開始研究使用柔性機器人,這些機器人有朝一日可以探索木衛(wèi)二Europa等。
-
機器人
+關(guān)注
關(guān)注
211文章
28578瀏覽量
207784 -
3D打印
+關(guān)注
關(guān)注
26文章
3558瀏覽量
109339
原文標(biāo)題:美陸軍研發(fā)受無脊椎動物啟發(fā)的軟體機器人
文章出處:【微信號:robot-1hjqr,微信公眾號:1號機器人網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評論請先 登錄
相關(guān)推薦
uvled光固化3d打印技術(shù)

DMD芯片在3D打印中的創(chuàng)新應(yīng)用
安泰ATA-7000系列高壓放大器在介電彈性體驅(qū)動實驗中的應(yīng)用
3D打印技術(shù)應(yīng)用的未來
物聯(lián)網(wǎng)行業(yè)中的模具定制方案_3D打印材料選型分享
3D打印耗材控濕方案--無水電解除濕器

安泰功率放大器如何驅(qū)動介電彈性體做運動





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論