 一文解析運動控制器的程序設計
一文解析運動控制器的程序設計
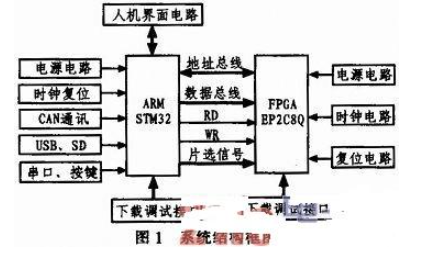
本系統采用的下位機為翠歐運動控制器MC206,根據本課題的要求,為了方便進行系統的調試和控制,纏繞機的工作方式分為手動、自動和半自動三種”。手動工作狀態是單獨控制小車軸和主軸的運動來實現指定纏繞;自動工作狀態是控制主軸和小車同步運動;半自動工作狀態是運用其BASIC語言用電子齒輪運動,其中齒輪比是可調的。自動控制方式下,為實現玻璃鋼的錐形的同步纏繞,Triobasic語言中的MOVELINK命令可以實現主軸和小車的運動,通過設定連接軸和被連接軸的加減速的距離,從而實現預期纏繞。以下為自動的控制方式下的流程圖:

MOVELINK為運動控制類命令,在基本軸產生直線運動,并通過電子齒輪比與連接軸的測量位置連接。其具體使用格式如下:MOVELNK(distance,linkdist,linkacc,linkdec.linkaxis[.linkoptions][.linkstart])
具體參數含義:
distance連接開始至結束當前基準軸(連接軸)增量運動距離;
linkdist在用戶單位下,從連接開始到結束,被連接軸(主軸)移動的正向距離;
linkacc基準軸加速過程中,主軸轉過的正向距離;
linkdec基準軸減速過程中,主軸轉過的正向距離;
linkaxis連接軸、主軸;
linkoptions1當主軸色標信號觸發時,從軸與主軸開始連結;2當主軸運動
到設定的絕對位置,從軸與主軸開始連結;4MOVELINK自動重復連續雙向運
行。設置REP_OPTION=1,取消此操作;
linkpos這個參數是絕對位置,當參數6設成2,MOVELINK在這個位置
開始連結;參數6和7可選。
其中,參考參數為AXIS,REP_OPTION,UNITS
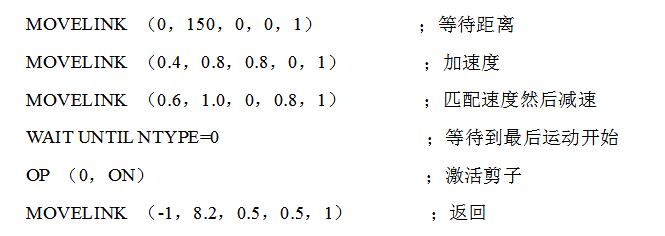
參數表明,連接軸可以向任意方向驅動輸出,基本軸的距離使得連接軸移動相應的距離。連接軸驅動基準軸的移動距離可以分成三個階段分別是加速、勻速、減速部分。其中加速度和誠速由linkacc和1inkdec參數設置。常速連接距離由總連接距離和以上兩個參數。這三個階段可以用三個獨立的MOVELINK指令也可以將其疊加在一條指令中。并且使用本指令有兩條規律。
規律一:在加速和減速階段為了與速度匹配,linkdist是distance的兩倍。
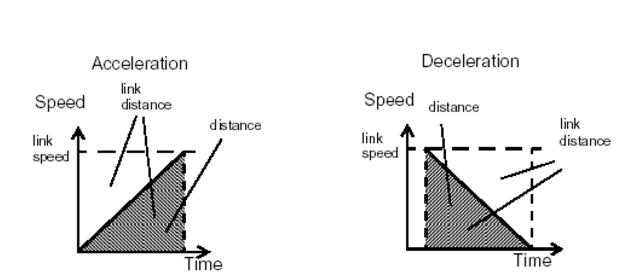
規律二:為了滿足速度需要,在常速階段,兩軸必須要運動相同的距離,其運動距離與linkdistance是相同的。MOVELINK工作在缺省軸,除非AXIS定義其它基本軸,linkaxis設置驅動基本軸。
注意:若linkacc和1inkdec的和大于linkdist,則它們要成比例的減少并使得兩者的總和等于linkdist。
舉例說明該語句的使用方法和功能:
例:飛剪以紙的速度在運動,每160米剪掉滾動的紙。飛剪可以運動到1.2米,此例中使用運動1米的距離。紙的運行長度由編碼器測量得出。兩軸的單位轉換因子設置成米。
軸1是連接軸。
在這個程序中,MC控制單元開始等待滾動150米。在這個距離之后,飛剪加速匹配紙的速度常速運行,再減速至停止,不超過1米的距離。這個運動使用兩MOVELINK指令。程序于是等待下一運動緩存清除NTYPE=0。這表明加速階段完成。連結軸(主軸)的距離在MOVELINK指令中是:150,0.8,1.0,8.2,總共160米。確定速度,飛剪位置和紙在剪切任務中匹配。MOVELINK指令的參數必須正確。因此,最先分別考慮加速度,常速和減速階段是最簡單的。這象以上陳述的,加速和誠速階段需要Linkdistance是distance的兩倍。兩個階段可
以定義為:
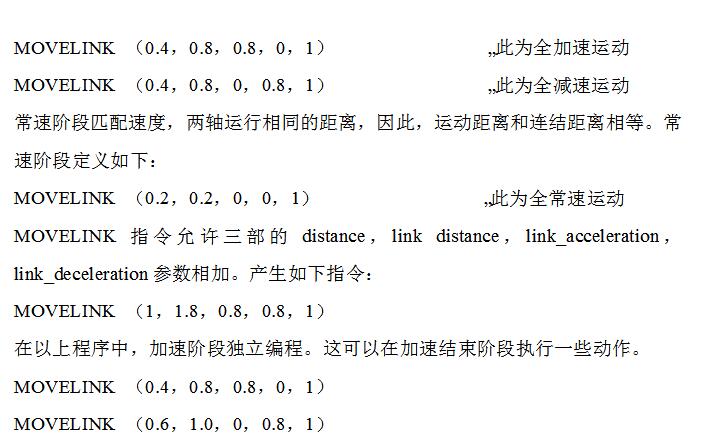
假設本系統中錐形管的長度為L,為了實現它的均勻纏繞,主軸做勻速旋轉,并且其所在的軸為軸0,小車也稱工作臺做加速,勻速,減速的過程,其所在的軸為軸1。在進行錐形管纏繞時,為了實現穩定纏繞,這里提出了一種運動方案,因為是進行錐形纏所以,導絲頭運動軌跡沿著錐形管外側母線運動,并且錐形管芯模和小車帶動的導絲頭兩者之間的距離是一定不變的,這樣可以使得導絲頭加速,勻速,和減速。其一個來回導絲頭的運動示意圖:
設置行程參數均已知:
1小車(工作臺):Lacc,主軸:Macc2小車:Lconst,主軸:Mconst;3小車:Ldec.主軸:Mdec;4小車:0,主軸:Mstop;5小車:-Ldec,主軸:Macc;6小車:-Lconst,主軸:Mconst;7小車:-Lacc,主軸:Macc;8小車:0,主軸:Mstop-。且一般的Lacc不等于Ldec的值。如此循環進行纏繞。
TrioBasic語言有廣泛的通用性,其內部有三種不同類型的存儲變量:VR變量、TABLE區變量、命名變量。命名變量是局部變量,所以僅在定義它的任務范圍內是有效變量。VR變量是全局變量,可以被多個子程序共同使用并且可用于各個任務間通訊;TABLE區一般是用于存儲CAM/CAMBOX指令曲線的。
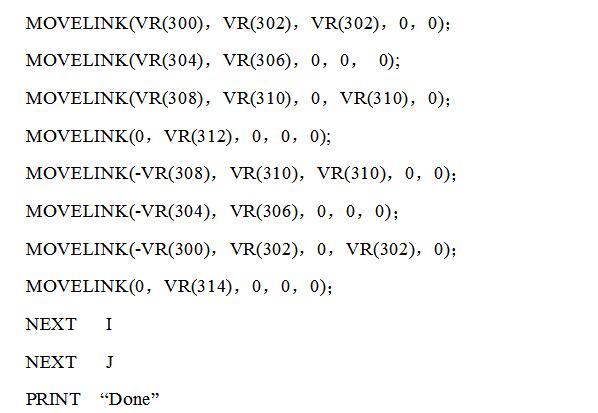
本程序運用的的是VR變量。選取VR變量區,從VR(300)開始定義變量。定義:
VR(300)=Lacc; 加速1段小車的行程(轉數)
VR(302)=Macc; 加速1段主軸的行程
VR(304)=Lconst; 勻速2 段小車的行程
VR(306)=Mconst; 今速2 段主軸的行程
VR(308)=Ldec; 減速3 段小車的行程
VR(310)=Mdec; 減速3 段主軸的行程
VR(3 12)=Mstopw; 停止4 段主軸的行程VR(314)=Mstoph; 停止8 段主軸的行程
VR(316)=I; 布滿芯模表面需要來回數VR(318)=J; 滿足生產工藝纏繞層數
由此,可以進行編程:
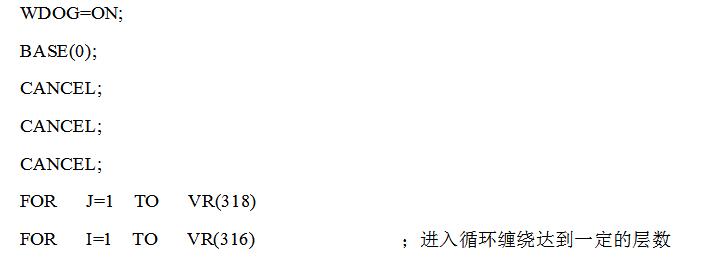
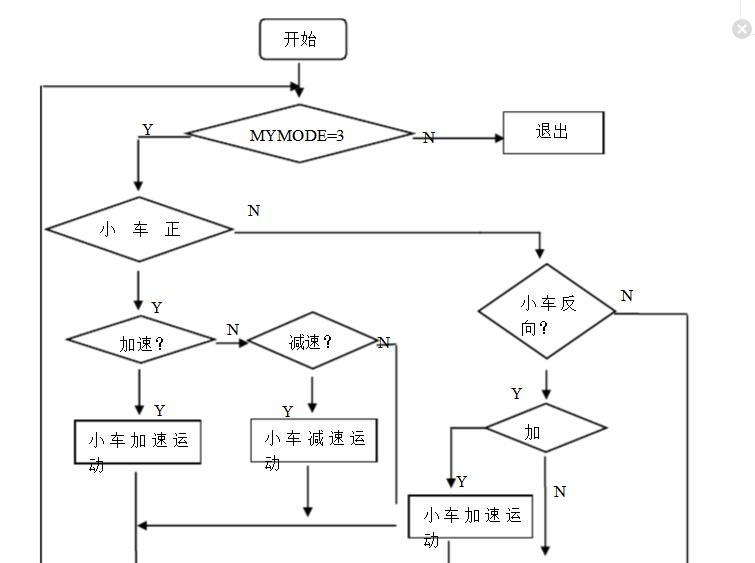
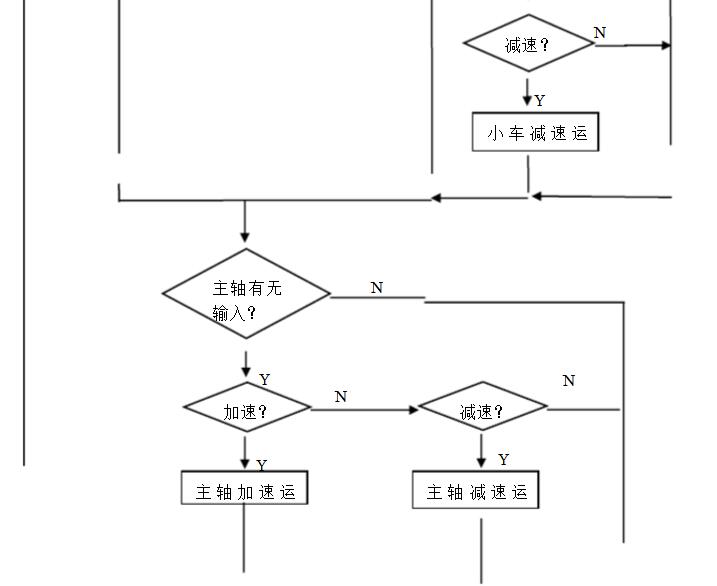
由上述可知,控制方式分為三種。為了方便調試和運行,本系統還設置了手動控制方式,即單獨控制主軸和小車的運動。這三種控制方式可以用以下圖來表示。
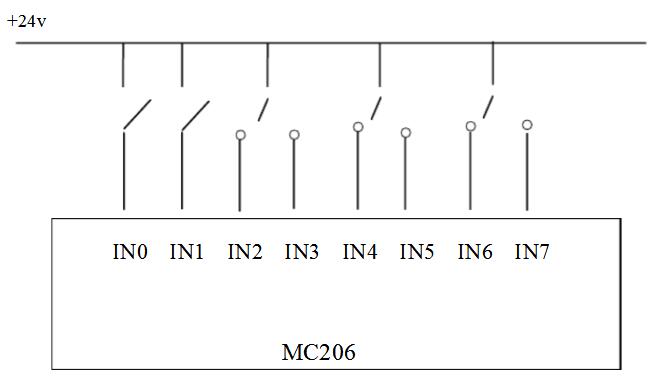
其中,IN0 接通高電平表示自動控制方式;N1接通表示半自動控制方式;如果以上兩種方式都不接通那么即表示為手動控制方式,可以采用三位兩通式的選擇開關不可自動復位。 N2 接通表示主軸加速; IN3 接通高電平表示主軸誠速,并且兩者不可同時接通,帶有自動復位的功能。 同理IN4 和IN5 分別表示小車正向加減速輸入,類似主軸加減速使用的開關; NN6 和N7 分別表示小車反向加減速輸入。 在手動控制方式下,設置變量分別表示不同的控制方式,用變量MYMODE表示控制方式。
小車的動作可分為正向運動和反向運動,這里所說的正向是與主軸旋轉的同 方向來規定的。因此也需要設置變量來表示小車的運動反方向從而更精確的進行 手動控制前進或者后退的距離。這里設置HEAD 和BACK 分別表示。
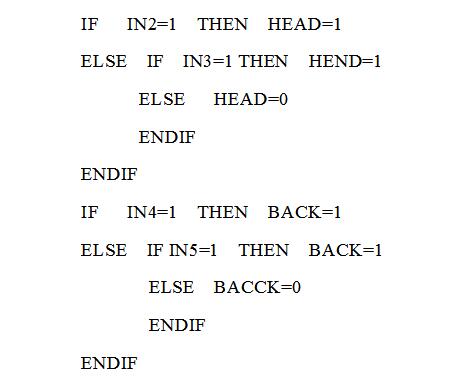
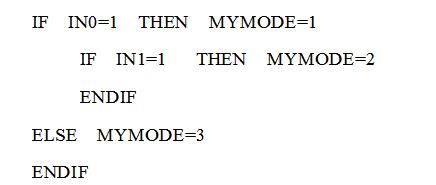
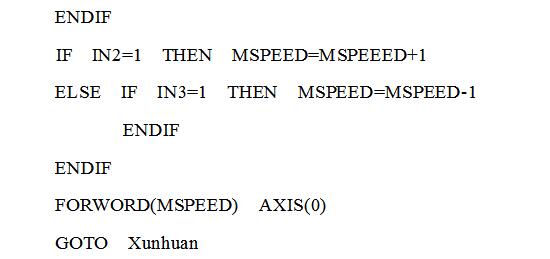
通過設置變量能夠更清晰的編寫程序,首先根據手動控制畫出程序流程圖, 圖中有些環節直接用變量來進行判斷。下圖為手動方式下的程序流程圖:
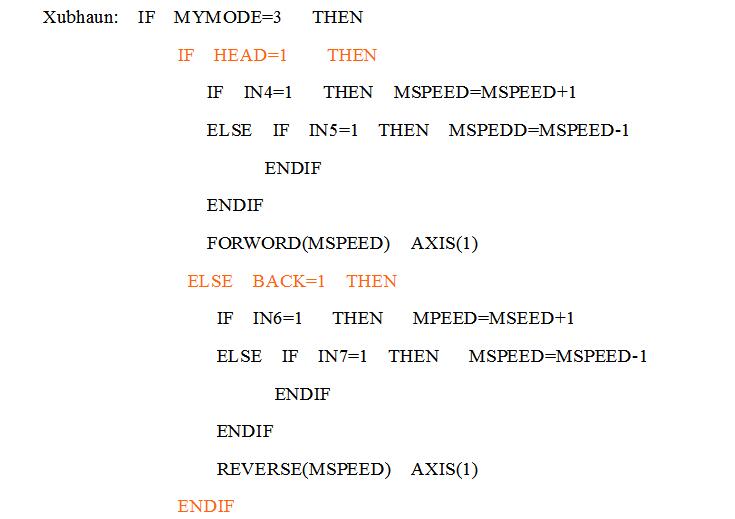
根據程序流程圖可以進行如下編程:
運動控制指令
語法:REVERSE
備選:RE
說明:REVERSE 反向連續運動,速度由SPEED 參數設置。加速率由ACCEL參數設置。
REVERSE 工作在缺省基本軸,除非AXIS 定義臨時基本軸。
注意:
反向運動可以被CANCEL 或RAPIDSTOP 指令停止。或到達反向限位,禁止或原點返回。
參閱:AXI S,CANCEL,FORWARD ,RAPIDSTOP
例子:back:
REVERSE
等待停止信號(0)WAIT UNTL N=ON
CANCE L
半自動控制方式待完善。
-
運動控制器
+關注
關注
2文章
404瀏覽量
24737
發布評論請先 登錄
相關推薦
基于FPGA的嵌入式運動控制器設計方案


面向對象的可編程控制器程序設計方法
基于SOPC的運動控制器設計
可編程控制器程序設計
基于MCX314的運動控制器設計







 工商網監
工商網監
評論