") 恒壓供水系統(tǒng)中的幾個(gè)參數(shù),變頻器中PID的定義
恒壓供水系統(tǒng)中的幾個(gè)參數(shù),變頻器中PID的定義
首先要明白恒壓供水系統(tǒng)中的幾個(gè)參數(shù)。
★>>>>兆帕與公斤
“1兆帕”是壓強(qiáng)的單位,即1兆帕=1000000帕的。
一平方米的面積上受到的壓力是一牛頓時(shí)所產(chǎn)生的壓強(qiáng)為一帕斯卡[1Pa=1N/(M×M)]。
而公斤力是力的單位:1公斤力=9.8牛頓。
這是兩個(gè)不同概念的物理量,沒(méi)法說(shuō)“1兆帕等于多少公斤力”。
但彼此有一定的關(guān)系:要產(chǎn)生“1兆帕”的壓強(qiáng),需在1平方厘米的面積上,施加的壓力約是10公斤。
1公斤壓力=0.098兆帕,
所以:1兆帕(MPA)≈10.2公斤壓力(KG/CM^2)
1MPa=10.197公斤/厘米2=101.97m水柱,可以讓水升高101.97m。
>>>>
PID控制器參數(shù)的工程整定,各種調(diào)節(jié)系統(tǒng)中P.I.D參數(shù)經(jīng)驗(yàn)數(shù)據(jù)以下參照:
溫度T: P=20~60%,T=180~600s,D=3-180s
壓力P: P=30~70%,T=24~180s,
液位L: P=20~80%,T=60~300s,
流量L: P=40~100%,T=6~60s。
基本的PID算法,需要整定的系數(shù)是Kp(比例系數(shù)),Ki(積分系數(shù)),Kd(微分系數(shù))三個(gè)。這三個(gè)參數(shù)對(duì)系統(tǒng)性能的影響如下:
>>>>
比例系數(shù)Kp
① 對(duì)動(dòng)態(tài)性能的影響 比例系數(shù)Kp加大,使系統(tǒng)的動(dòng)作靈敏,速度加快,Kp偏大,振蕩次數(shù)加多,調(diào)節(jié)時(shí)間加長(zhǎng)。當(dāng)Kp太大時(shí),系統(tǒng)會(huì)趨于不穩(wěn)定,若Kp太小,又會(huì)使系統(tǒng)的動(dòng)作緩慢;
② 對(duì)穩(wěn)態(tài)性能的影響 加大比例系數(shù)Kp,在系統(tǒng)穩(wěn)定的情況下,可以減小靜差,提高控制精度,但是加大Kp只是減少靜差,不能完全消除。
>>>>積分系數(shù)Ki
① 對(duì)動(dòng)態(tài)性能的影響 積分系數(shù)Ki通常使系統(tǒng)的穩(wěn)定性下降。Ki太大,系統(tǒng)將不穩(wěn)定;Ki偏大,振蕩次數(shù)較多;Ki太小,對(duì)系統(tǒng)性能的影響減少;而當(dāng)Ki合適時(shí),過(guò)渡特性比較理想;
② 對(duì)穩(wěn)態(tài)性能的影響 積分系數(shù)能消除系統(tǒng)的靜差,提高控制系統(tǒng)的控制精度。但是若Ki太小時(shí),積分作用太弱,以致不能減小靜差。
>>>>
微分系數(shù)Kd
微分控制可以改善動(dòng)態(tài)特性,如超調(diào)量減少,調(diào)節(jié)時(shí)間縮短,允許加大比例控制,使靜差減小,提高控制精度。但當(dāng)Kd偏大或偏小時(shí),超調(diào)量較大,調(diào)節(jié)時(shí)間較長(zhǎng),只有合適的時(shí)候,才可以得到比較滿意的過(guò)渡過(guò)程。對(duì)系數(shù)實(shí)行“先比例,后積分,再微分”的整定步驟。
(1) 首先只整定比例部分。即將比例系數(shù)由小到大,并觀察相應(yīng)的系統(tǒng)響應(yīng),直到得到反應(yīng)快,超調(diào)小的響應(yīng)。
(2) 加入積分環(huán)節(jié)。整定時(shí)首先置積分系數(shù)Ki一個(gè)較小的值,并將第(1)步中整定的比例系數(shù)略為縮小(例如縮小為原值的0.8倍),然后增大Ki,使在保持系統(tǒng)良好動(dòng)態(tài)性能的情況下,靜差得到消除。在此過(guò)程中,可根據(jù)響應(yīng)的好壞反復(fù)改變比例系數(shù)與積分系數(shù)。
(3) 若使用比例積分調(diào)節(jié)器消除了靜差,但動(dòng)態(tài)過(guò)程經(jīng)反復(fù)調(diào)整仍不能滿意,則可加入微分環(huán)節(jié)。在整定時(shí),可先置微分系數(shù)為0,在第一步的基礎(chǔ)上,增大Kd,同時(shí)相應(yīng)地改變比例系數(shù)和積分時(shí)間。
p值設(shè)置越大,靜差越小,跟蹤越快,但容易出現(xiàn)超調(diào)震蕩現(xiàn)象,i的值設(shè)置越大,跟蹤就越慢,在實(shí)際使用中,以系統(tǒng)穩(wěn)定和跟蹤速度達(dá)到工藝要求為準(zhǔn),即在水泵恒壓供水系統(tǒng)中,壓力穩(wěn)定為基準(zhǔn)。
不過(guò)以上PID定義僅了解一下即可,實(shí)際小項(xiàng)目中的變頻器PID參數(shù)不用更改(出廠默認(rèn)值)也可實(shí)現(xiàn)功能。
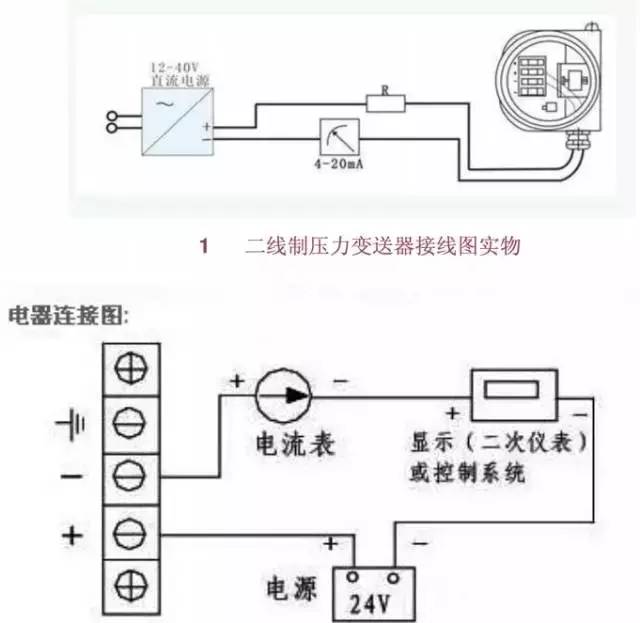
設(shè)置變頻器時(shí),只要知道PID需要反饋量和給定量即可。反饋量即是壓力的實(shí)時(shí)信號(hào)(在管道上的遠(yuǎn)傳壓力表---電阻式,或者是三線或兩線的壓力傳感器。給定量即要求達(dá)到我壓力值(可以在變頻器的鍵盤(pán)上設(shè)或者用外置電位器)。
>>>>
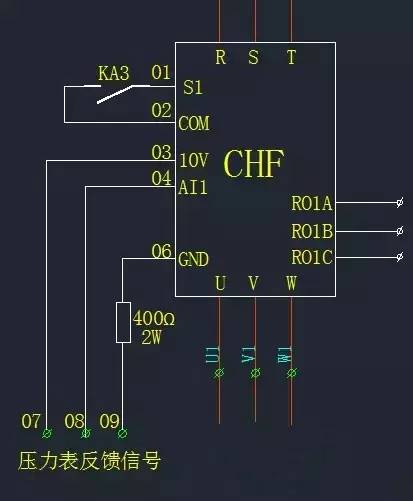
變頻器外部接線
對(duì)應(yīng)的電壓、電流型反饋量接線應(yīng)設(shè)置變頻器的 AI1/AI2,內(nèi)部參數(shù)及外部跳線(一般AI1默認(rèn)為電壓)
電器連接圖
>>>>
設(shè)置變頻器參數(shù)
設(shè)置變頻器參數(shù):VL6000系列變頻器
以反饋量為0.45兆帕(二線制壓力傳感器4-20Ma,傳感器量程0-0.6兆帕),則在變頻器輸入的給定量為75%(0.45除0.6)
以VL6000為例,由于VL6000的AI1內(nèi)置成了面板上的電位器,所以反饋信號(hào)接于AI2,又由于AI2出廠值是電壓信號(hào),需設(shè)置跳線將其改為電流信號(hào)。
00-02=1 命令源選擇=1:端子
01-01=50 最大操作頻率
01-03=50 頻率上限
01-05=15 頻率下限
01-08=8 主頻率源×選擇
小功率變頻器,加減速時(shí)間不必設(shè)置,保持默認(rèn),
02-07=0 變頻器的停車(chē)方式,此為減速停車(chē),若變頻器為工頻變頻轉(zhuǎn)換或一拖幾的控制時(shí),停車(chē)方式應(yīng)為自由停車(chē)。
02-15=0,為變頻器運(yùn)行頻率低于下限時(shí)為以頻率下限運(yùn)行
05組為電機(jī)參數(shù),能實(shí)際電機(jī)銘牌上參數(shù)設(shè)
控制端子組及繼電器輸出組根據(jù)線路實(shí)際功能設(shè)置即可
10-04=1V, AI2下限設(shè)為1V對(duì)應(yīng)反饋4mA
10-06=10V, AI2上限為10V對(duì)應(yīng)反饋20mA
21組為PID組
21-00=0,PID給定源 0:21-01
21-01=?,根據(jù)目標(biāo)值:反饋?zhàn)畲罅砍蹋嗽O(shè)定參考值75%
21-03=1,PID反饋值,1:V12
21-04=0,PID輸出特性為正,由于為恒壓供水,即當(dāng)反饋小于給定時(shí)要加速,大于給定時(shí)要減速。
32-10=16為反饋量顯示可以實(shí)時(shí)監(jiān)控(只有VL6000有此功能)
-
變頻器
+關(guān)注
關(guān)注
251文章
6555瀏覽量
144716 -
PID
+關(guān)注
關(guān)注
35文章
1472瀏覽量
85521 -
恒壓供水系統(tǒng)
+關(guān)注
關(guān)注
1文章
32瀏覽量
10324
原文標(biāo)題:干貨必備!變頻器恒壓供水調(diào)試教程
文章出處:【微信號(hào):GKB1508,微信公眾號(hào):工控幫】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
變頻控制恒壓供水系統(tǒng)設(shè)計(jì)方案
無(wú)線自動(dòng)控制變頻恒壓供水系統(tǒng)
基于51單片機(jī)的恒壓供水系統(tǒng)設(shè)計(jì)
基于變頻器的供水系統(tǒng)設(shè)計(jì)
基于變頻器的恒壓供水系統(tǒng)的設(shè)計(jì)
PLC在恒壓供水系統(tǒng)中的應(yīng)用設(shè)計(jì)
變頻調(diào)速恒壓供水系統(tǒng)
plc恒壓供水系統(tǒng)設(shè)計(jì)

基于神經(jīng)網(wǎng)絡(luò)PID控制的變頻恒壓供水系統(tǒng)_秦小玉
變頻恒壓供水系統(tǒng)簡(jiǎn)述
基于PLC的變頻恒壓供水系統(tǒng)的設(shè)計(jì)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論