") 三菱PLC-QD77定位控制的目的與用途
三菱PLC-QD77定位控制的目的與用途
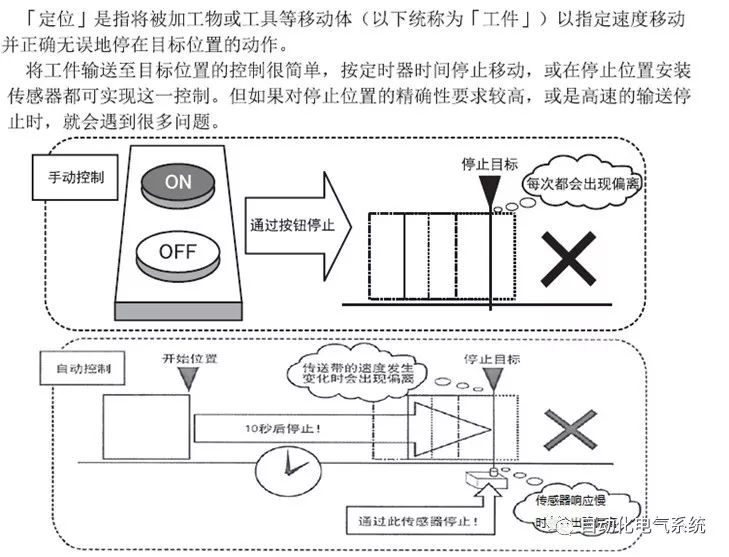
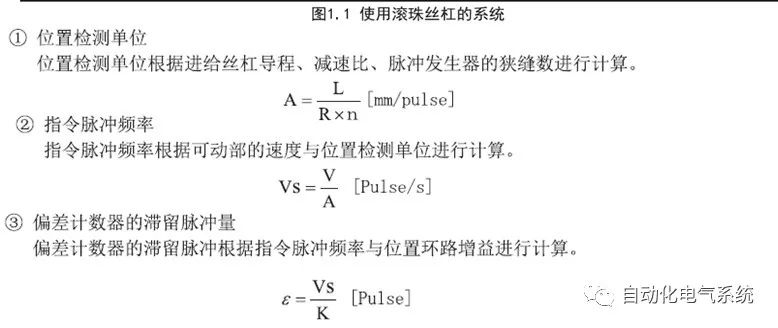
1. 定位控制的目的與用途
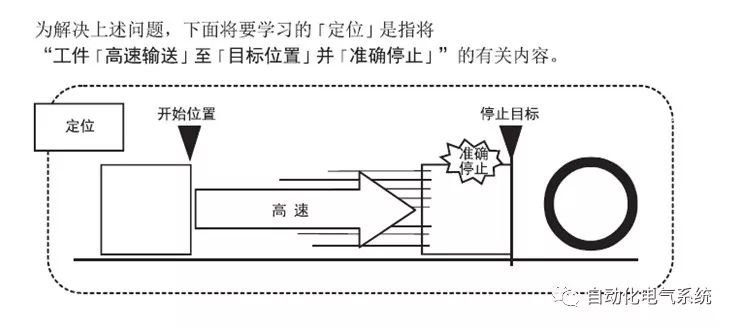
1.1什么是定位控制
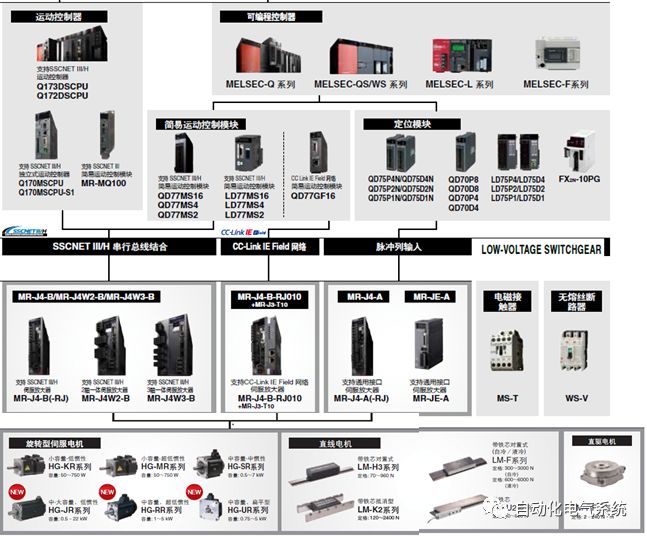
1.2定位系統(tǒng)的構(gòu)成
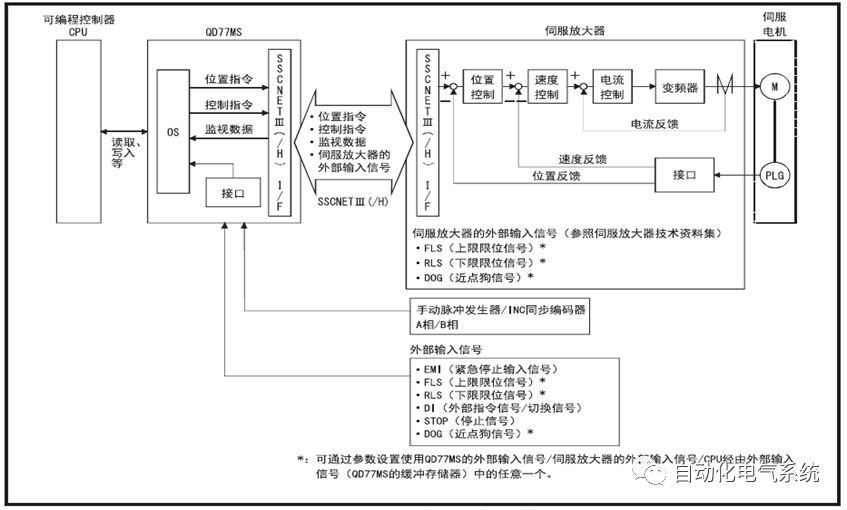
精確定位控制的系統(tǒng),又叫伺服系統(tǒng)。
伺服系統(tǒng)由伺服系統(tǒng)控制器、伺服放大器、伺服電機(jī)組成
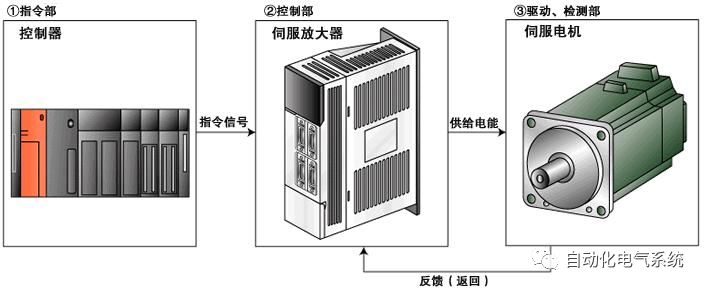
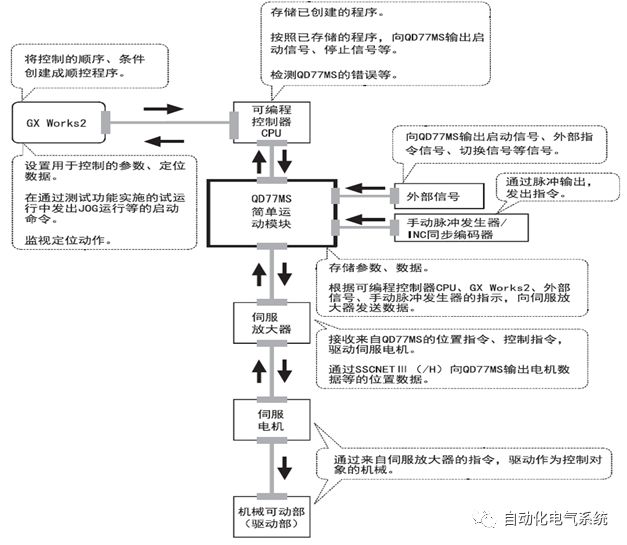
伺服放大器就是根據(jù)用戶在控制器輸入了目標(biāo)值(位置,速度等)后,接受到伺服系統(tǒng)控制器的位置指令信息對當(dāng)前值(位置,速度等反饋信號(hào))進(jìn)行檢測,驅(qū)動(dòng)伺服電機(jī)始終朝縮小與目標(biāo)值差距的方向進(jìn)行控制的機(jī)構(gòu)
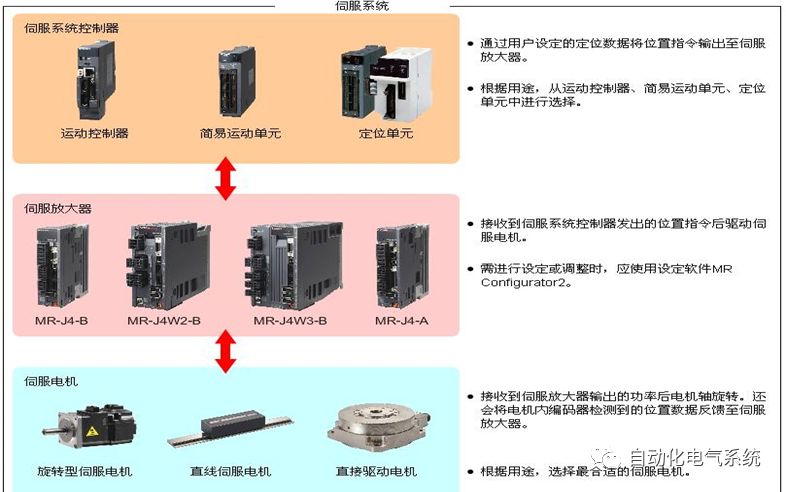
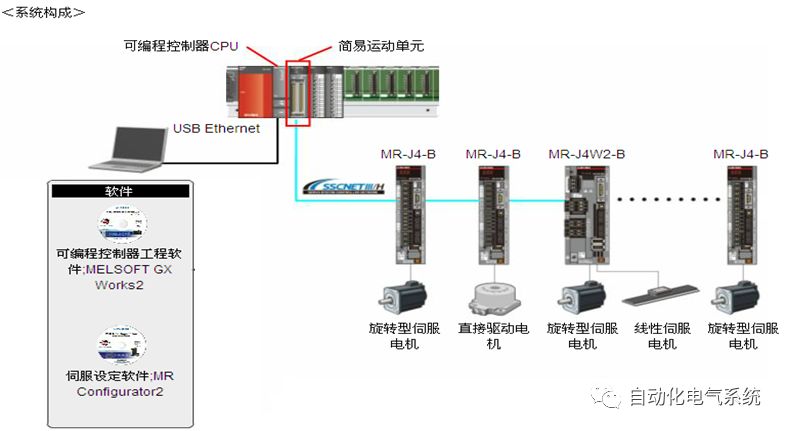
簡易運(yùn)動(dòng)單元構(gòu)成的定位系統(tǒng)是指由可編程控制器CPU進(jìn)行控制,輕松實(shí)現(xiàn)定位控制的智能單元。
QD77MS定位控制
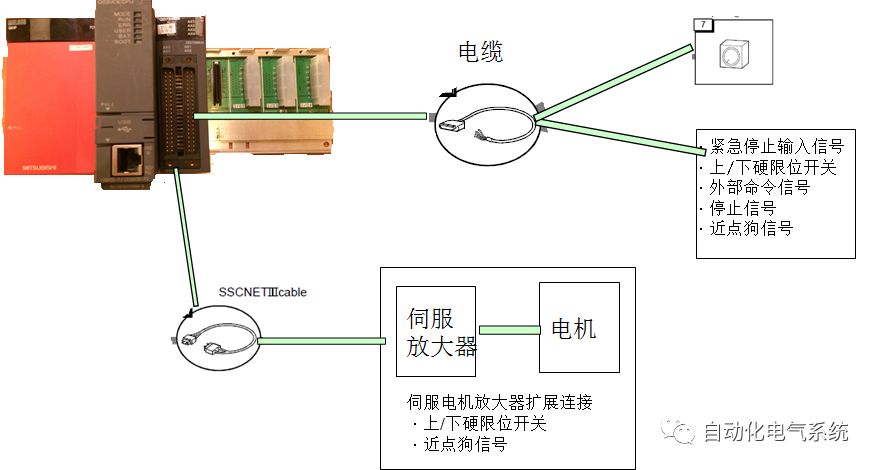
1.3 定位控制的大致設(shè)計(jì)
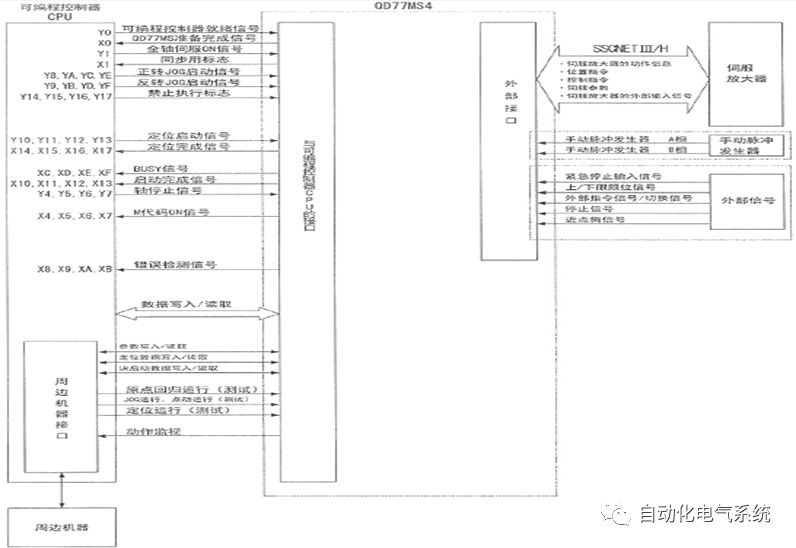
使用了QD77簡易運(yùn)動(dòng)單元的定位系統(tǒng)大概設(shè)計(jì)如下
QD77MS系統(tǒng)全貌
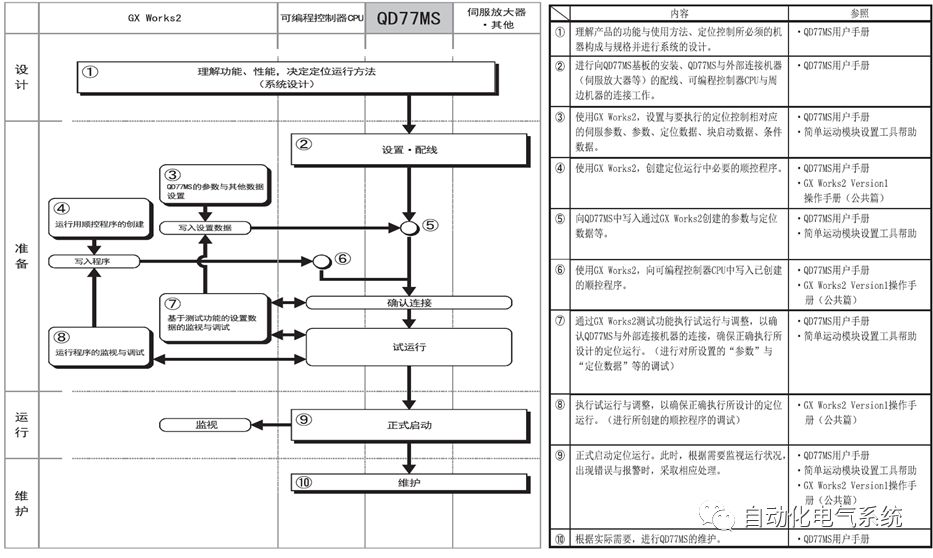
1.4定位系統(tǒng)應(yīng)用流程
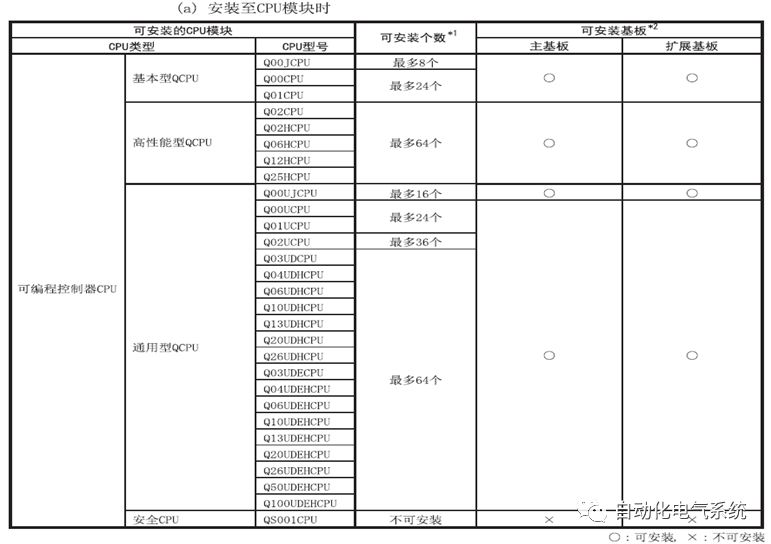
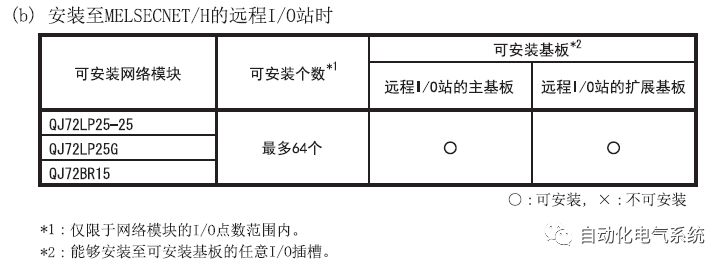
1.5QD77MS系統(tǒng)安裝個(gè)數(shù)
2.簡易運(yùn)動(dòng)模塊QD77的規(guī)格與功能
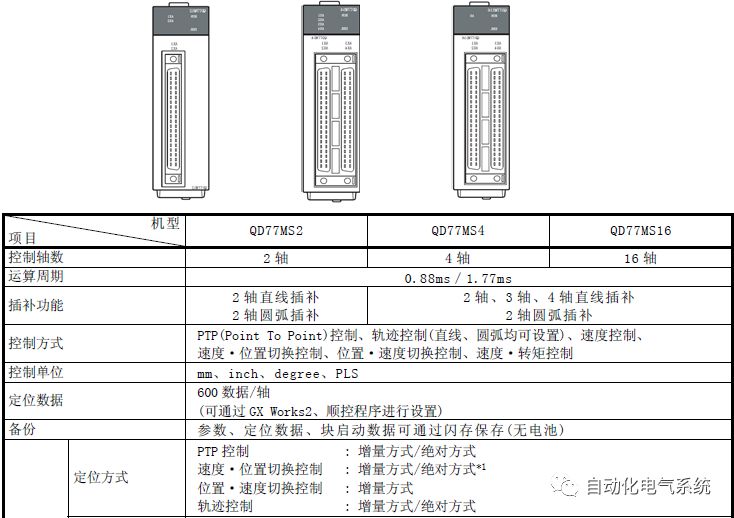
2.1QD77MS性能規(guī)格
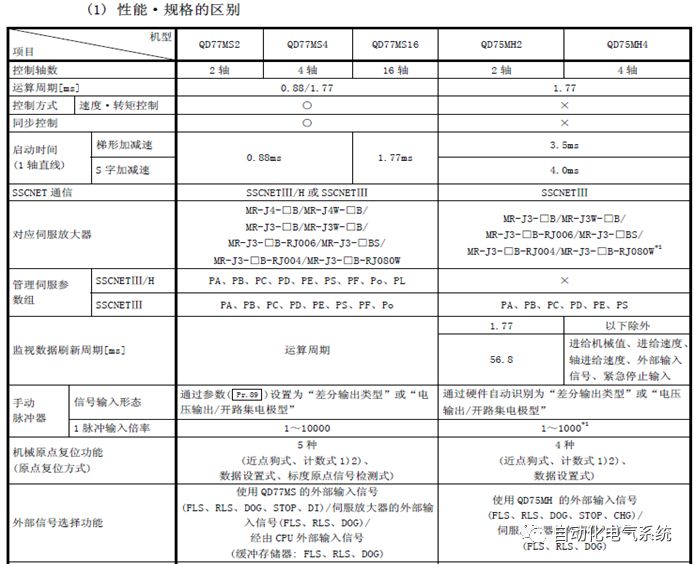
2.2QD77MS與QD75MH的區(qū)別

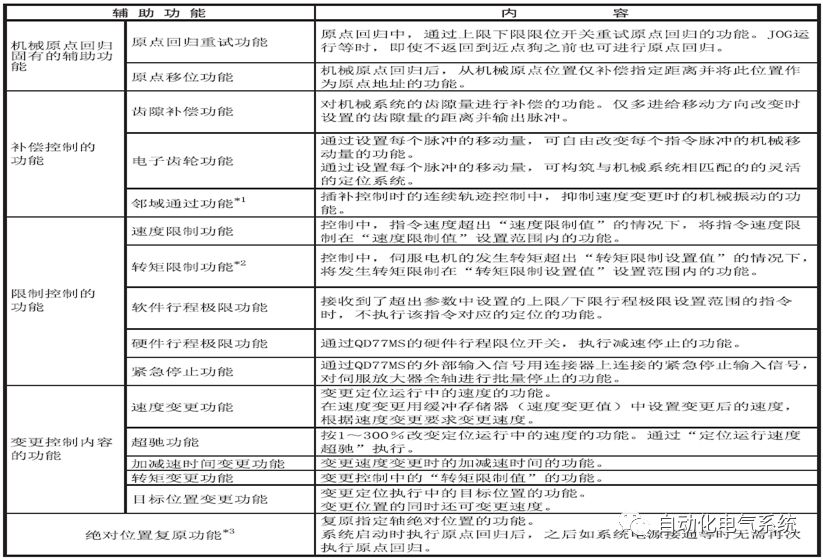
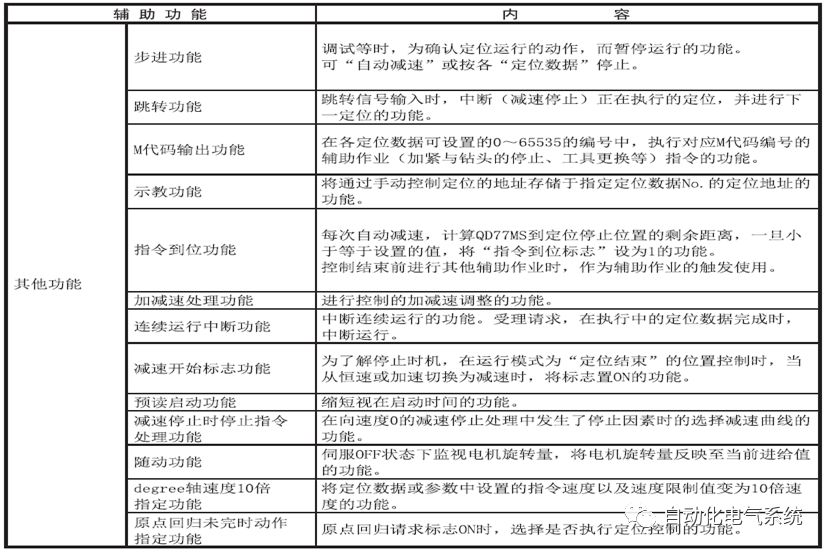
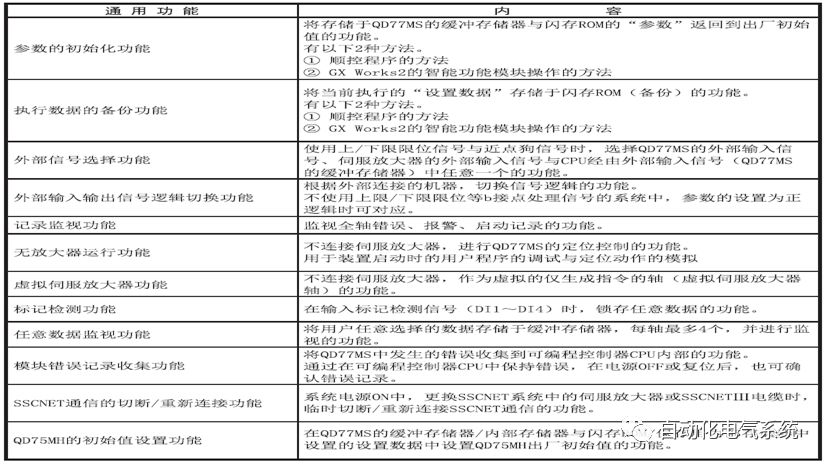
QD77MS的功能分為主要控制功能、通用功能以及輔助功能三部分。參考教材3-6。
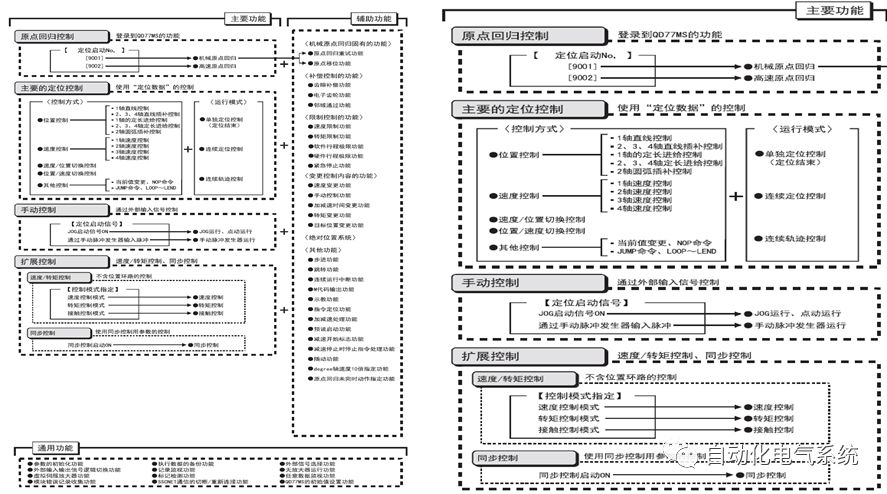
2.3QD77MS的功能

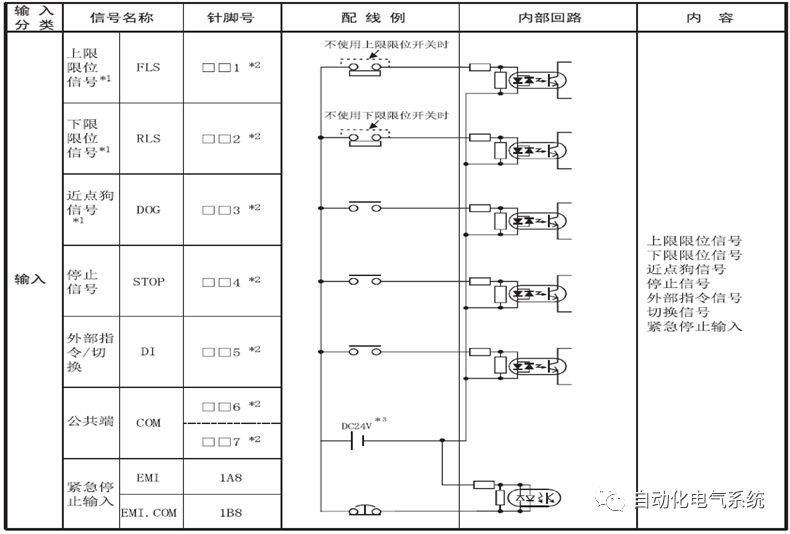
2.4與外部輸入輸出的接口
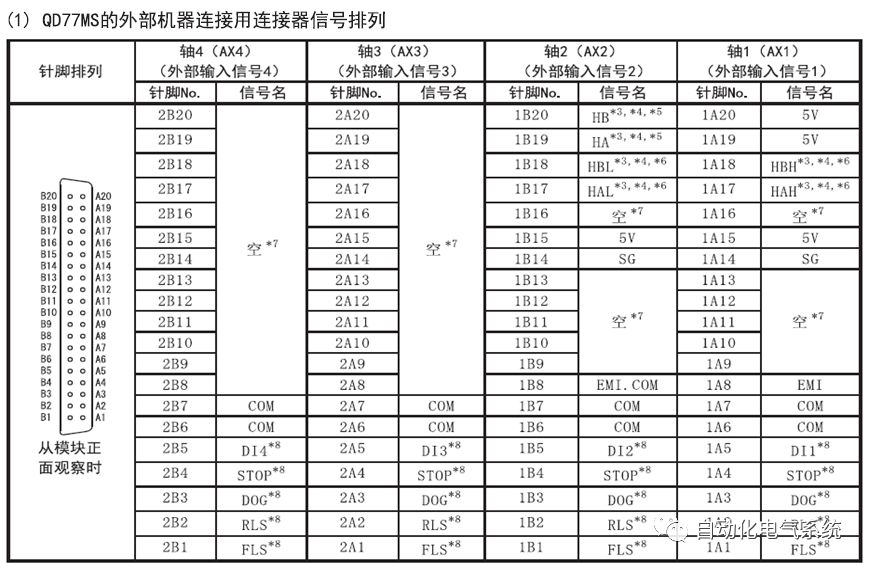
a)與外部輸入信號(hào)/緊急停止輸入信號(hào)的接口
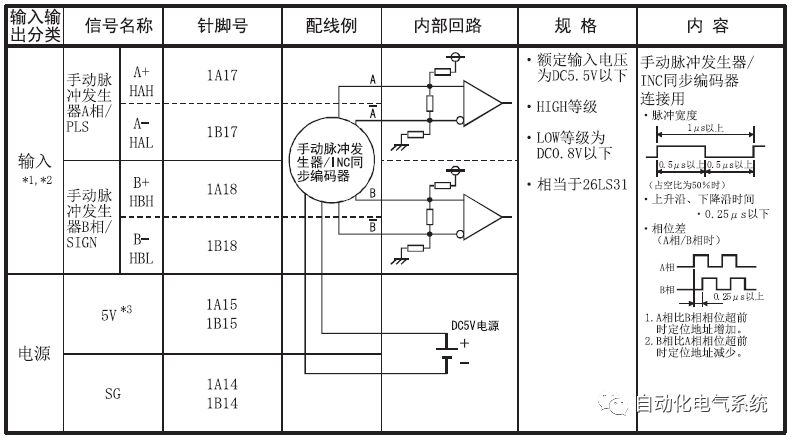
b)手動(dòng)脈沖發(fā)生器/INC同步編碼器
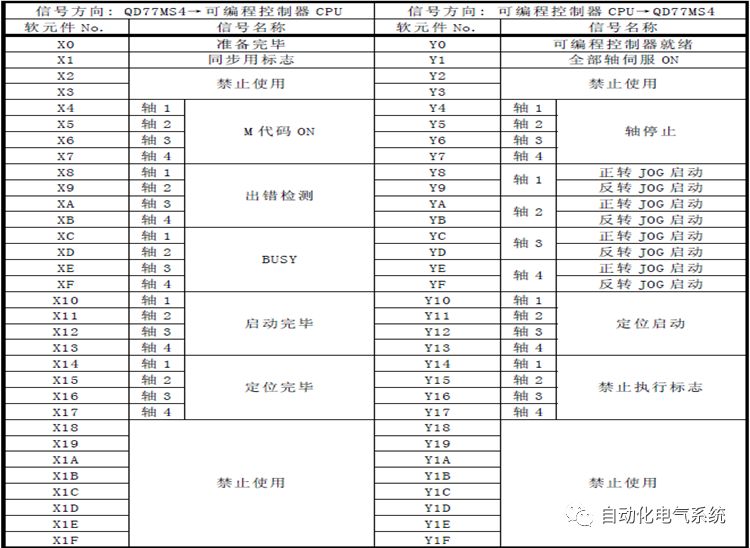
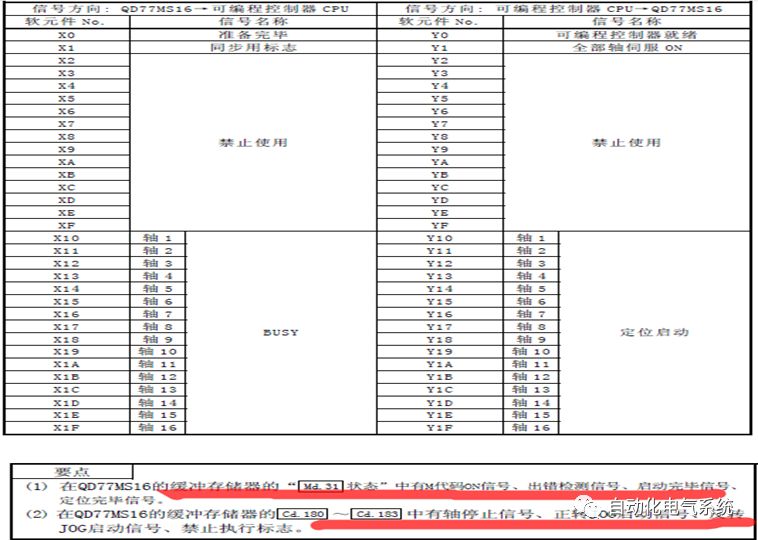
2.5QD77MS與PLC的輸入輸出信號(hào)規(guī)格
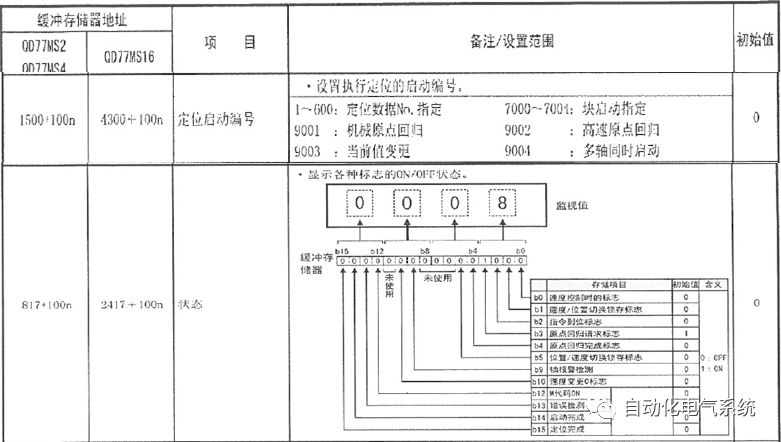
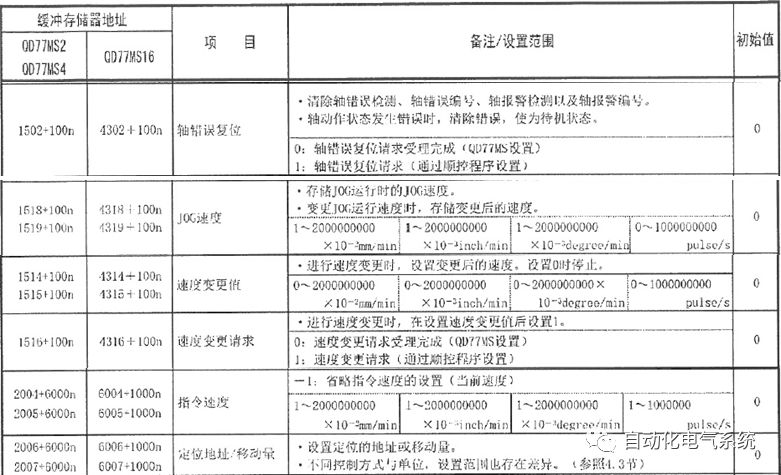
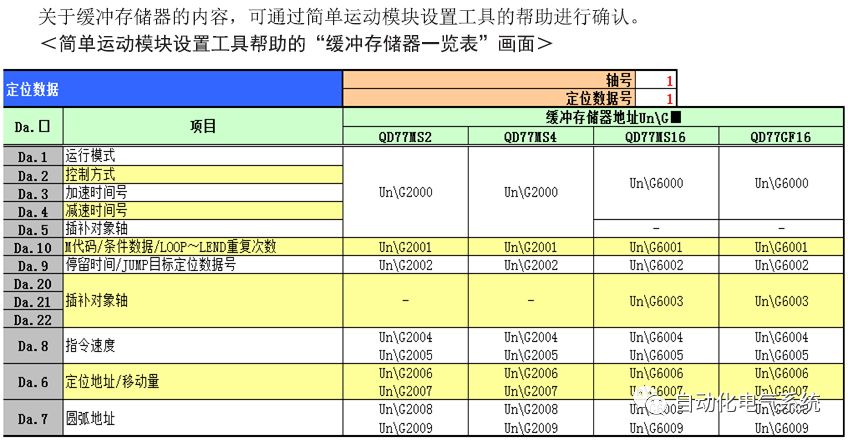
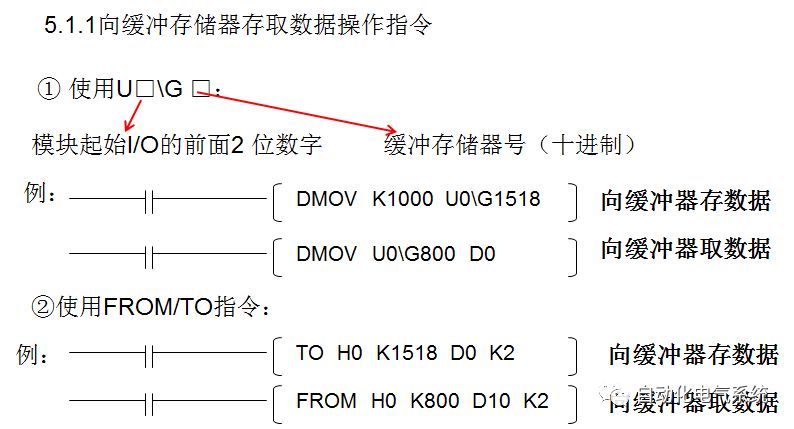
2.6常用的緩沖存儲(chǔ)器
QD77MS中有緩沖存儲(chǔ)器,通過順控程序進(jìn)行讀取、寫入可實(shí)現(xiàn)高級(jí)控制,下面介紹常用的緩沖存儲(chǔ)器
3.數(shù)據(jù)的種類
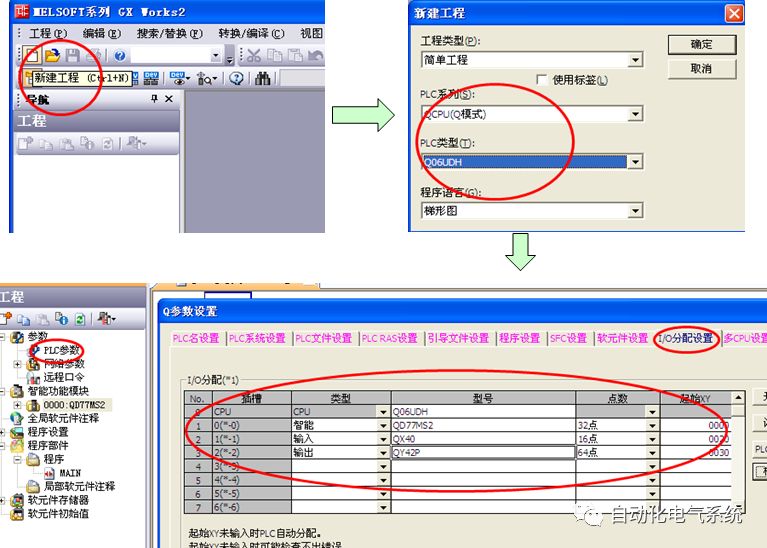
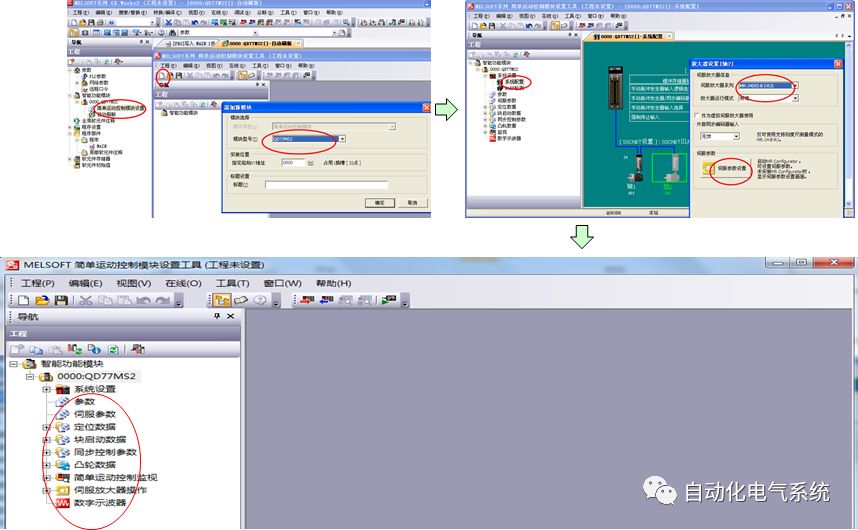
3.1QD77MS項(xiàng)目新建
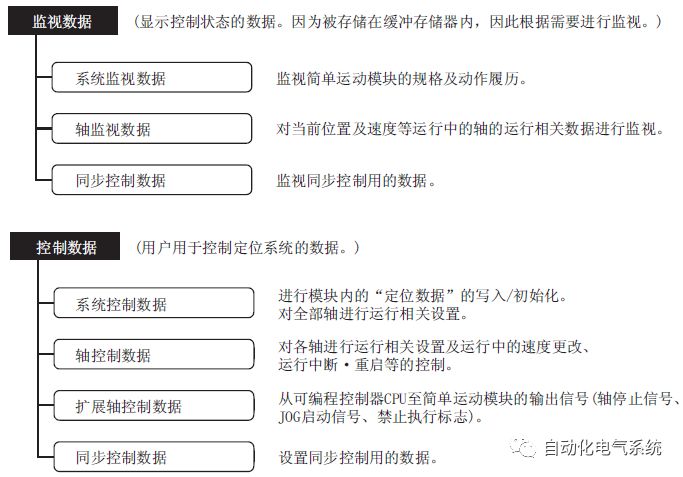
3.2數(shù)據(jù)的種類
進(jìn)行使用QD77MS控制時(shí)所需參數(shù)與數(shù)據(jù)包括“設(shè)置數(shù)據(jù)”、“監(jiān)視數(shù)據(jù)”、“控制數(shù)據(jù)”三種
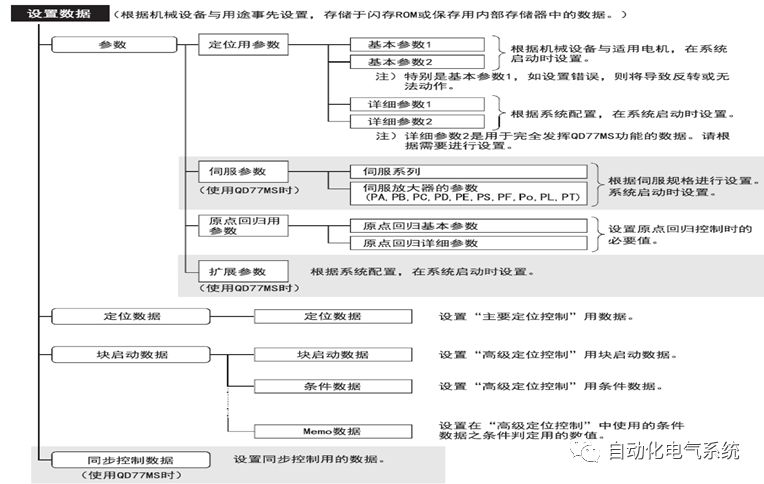
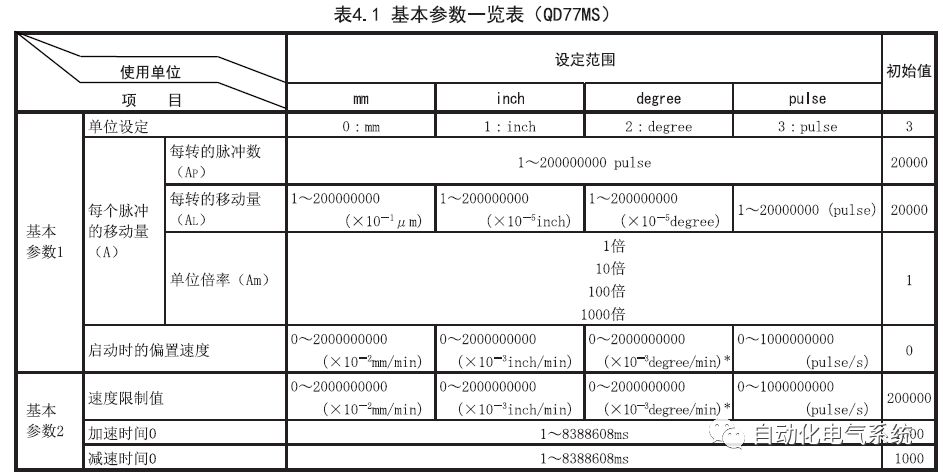
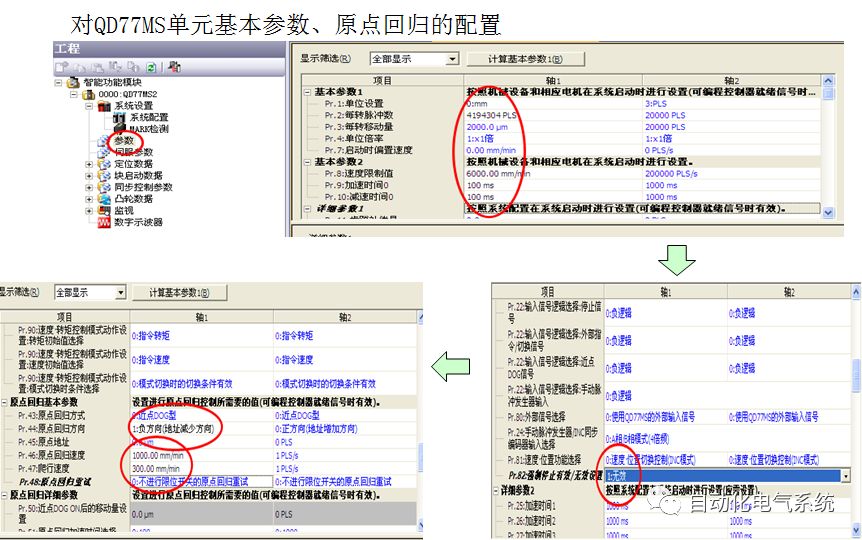
3.3QD77MS參數(shù)
3.3.1基本參數(shù)
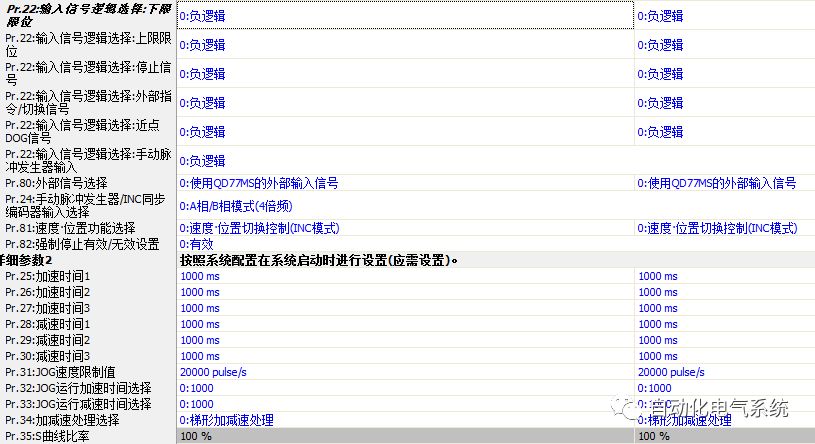
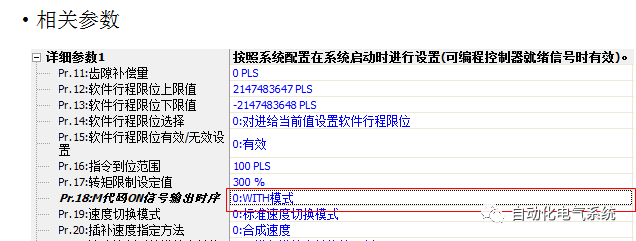
3.3.2詳細(xì)參數(shù)
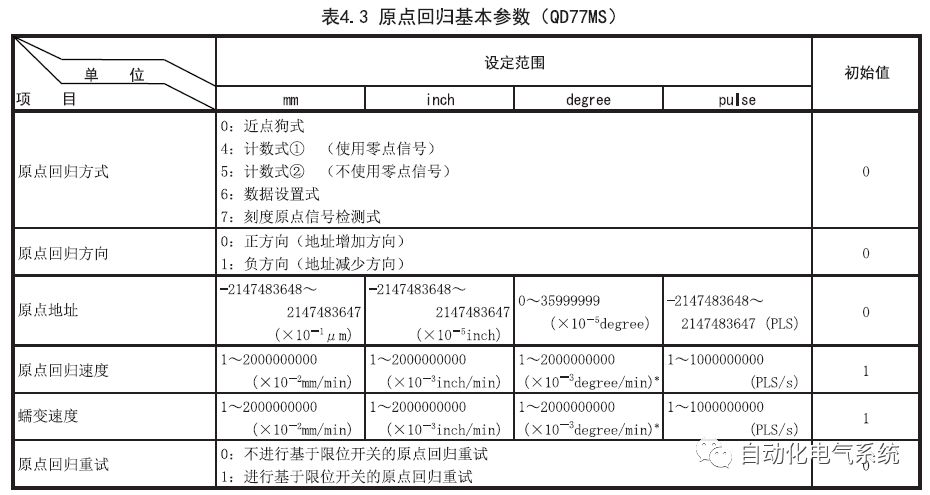
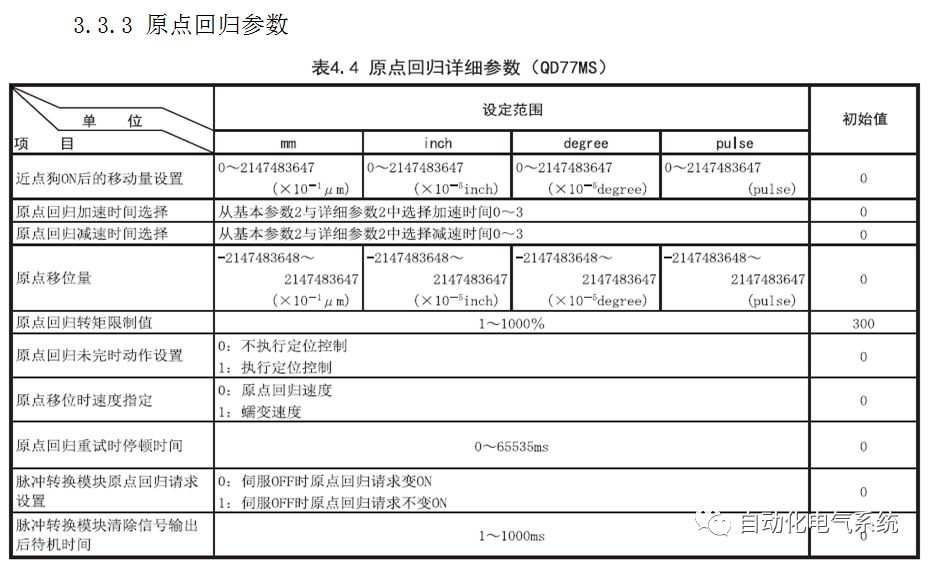
3.3.3原點(diǎn)回歸參數(shù)
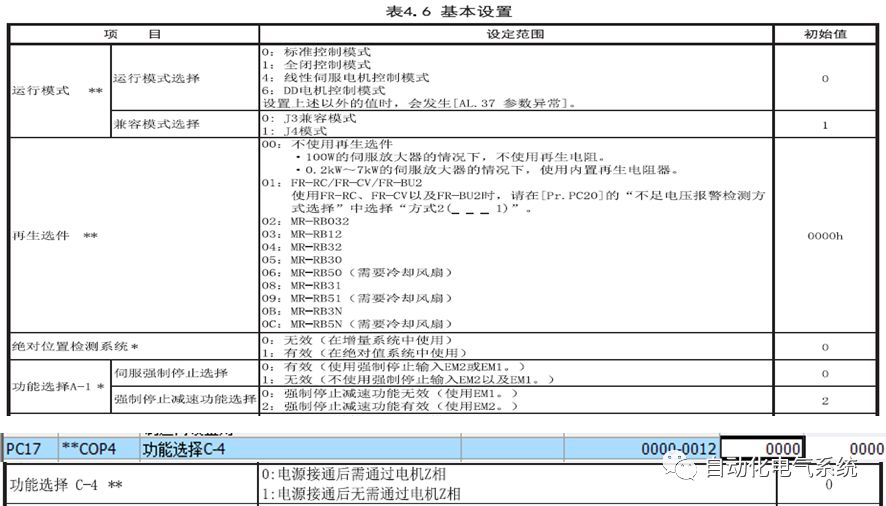
3.4伺服參數(shù)
4.通過GX Works2實(shí)施測試運(yùn)行
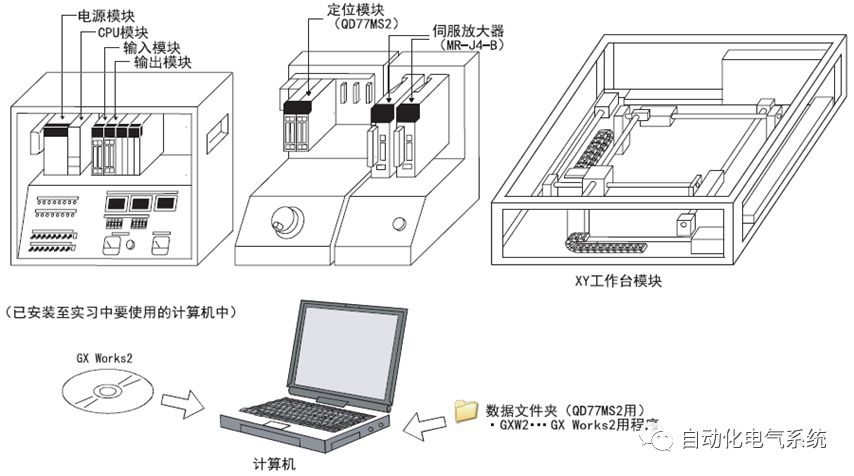
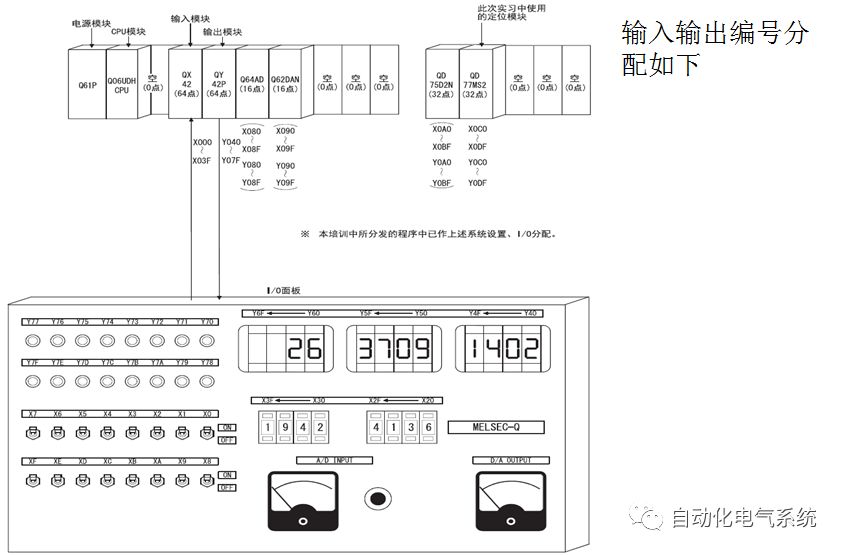
4.1實(shí)習(xí)設(shè)備的系統(tǒng)構(gòu)成
此次培訓(xùn)用實(shí)習(xí)設(shè)備由Q系列PLC實(shí)習(xí)設(shè)備,QD77MS簡易運(yùn)動(dòng)模塊,MR-J4-B伺服放大器及X-Y工作臺(tái)構(gòu)成
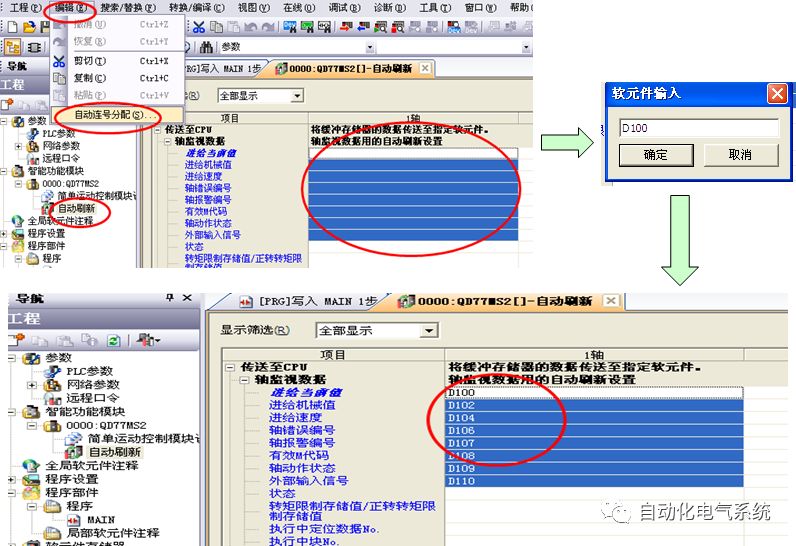
4.2自動(dòng)刷新的設(shè)置
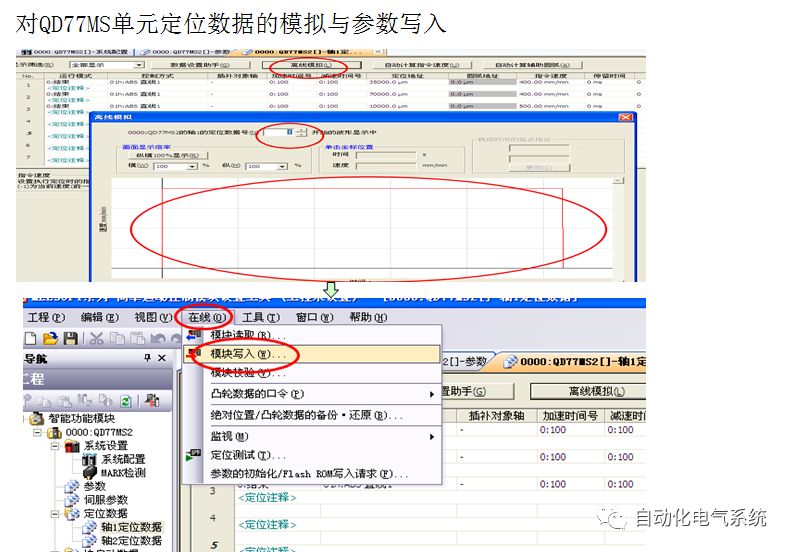
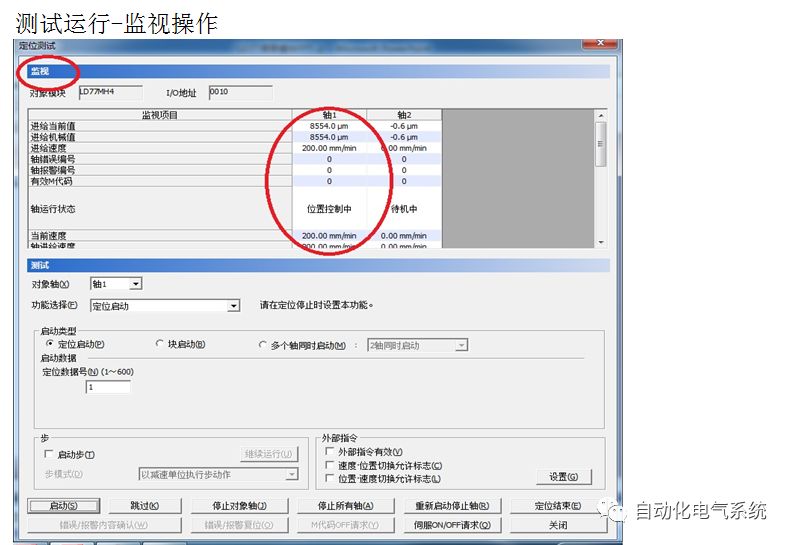
4.3通過GX Works2實(shí)施測試運(yùn)行


5.通過順控程序?qū)嵤?軸的定位運(yùn)行
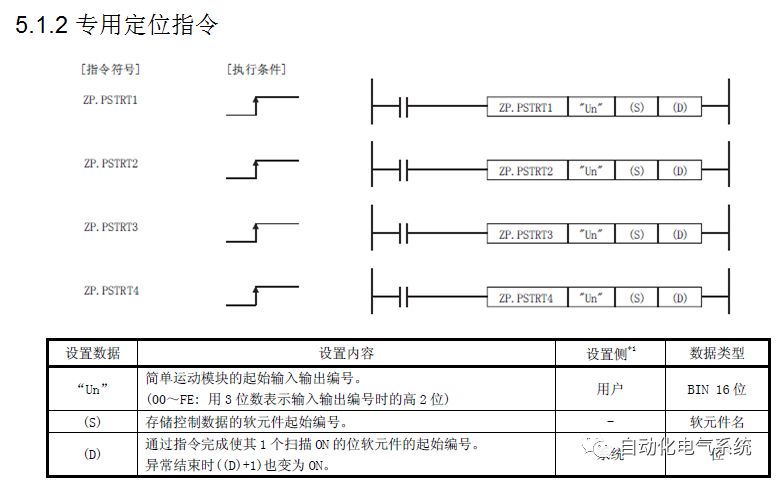
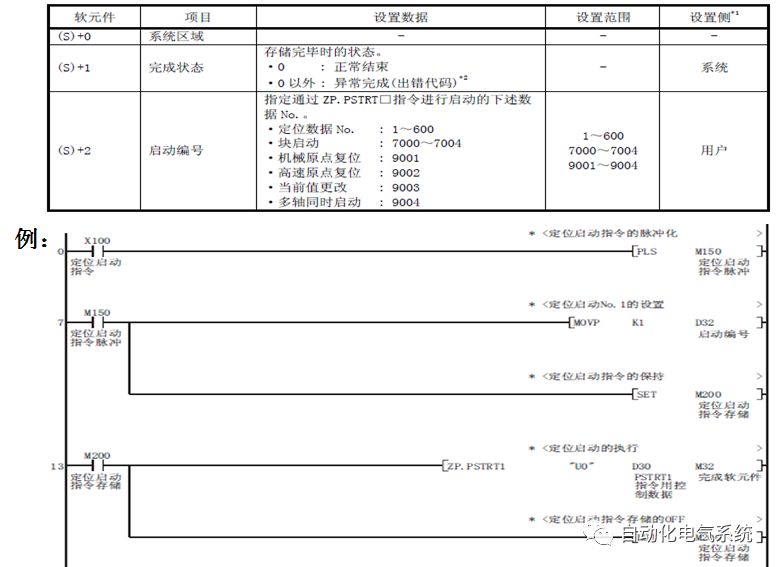
5.1操作指令
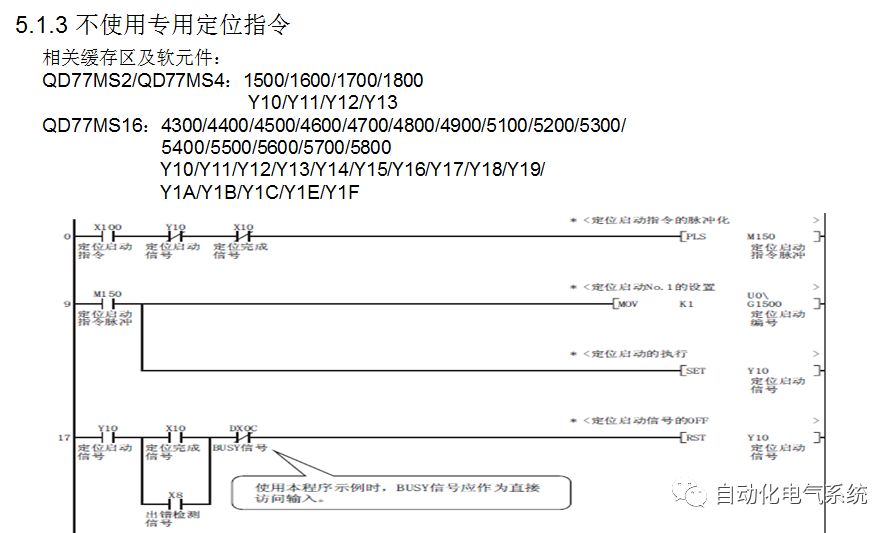
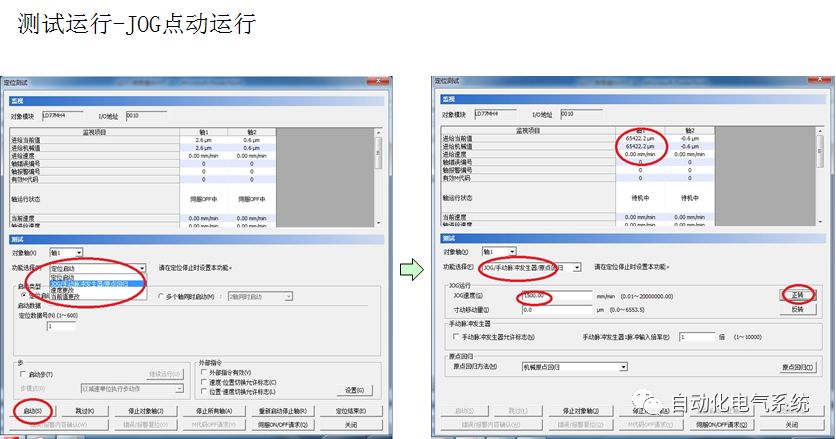
5.2手動(dòng)控制
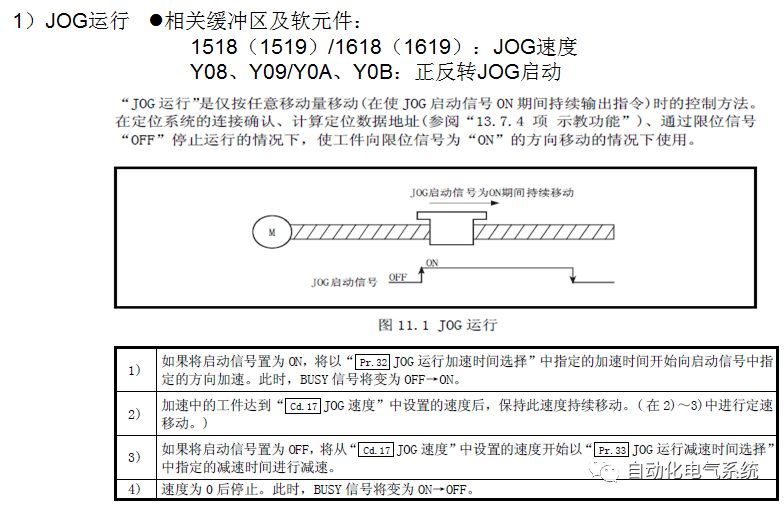
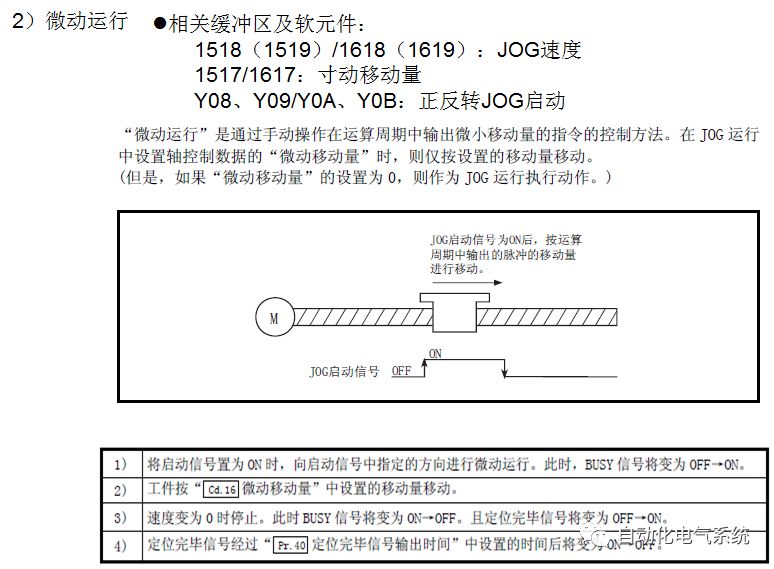
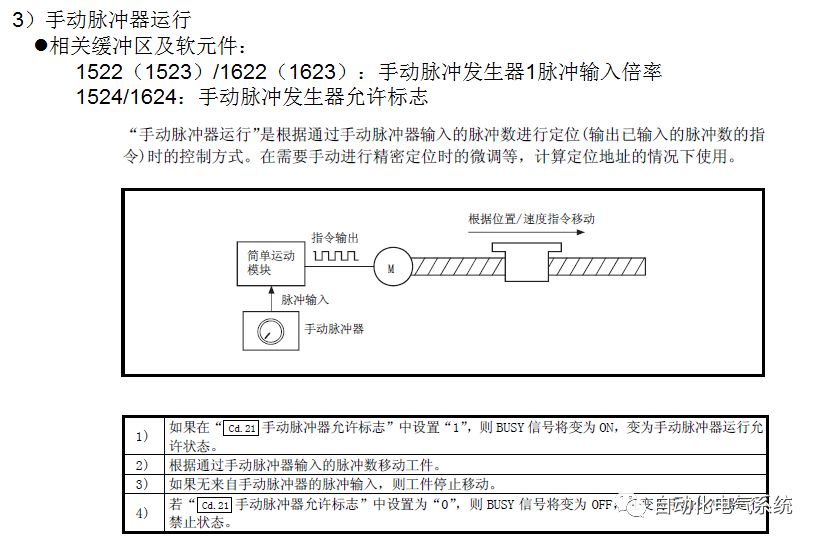
“手動(dòng)控制”是不使用定位數(shù)據(jù),根據(jù)來自于外部的信號(hào)輸入進(jìn)行任意定位動(dòng)作的控制。“手動(dòng)控制”有JOG運(yùn)行、微動(dòng)運(yùn)行、手動(dòng)脈沖器運(yùn)行3種控制方式。
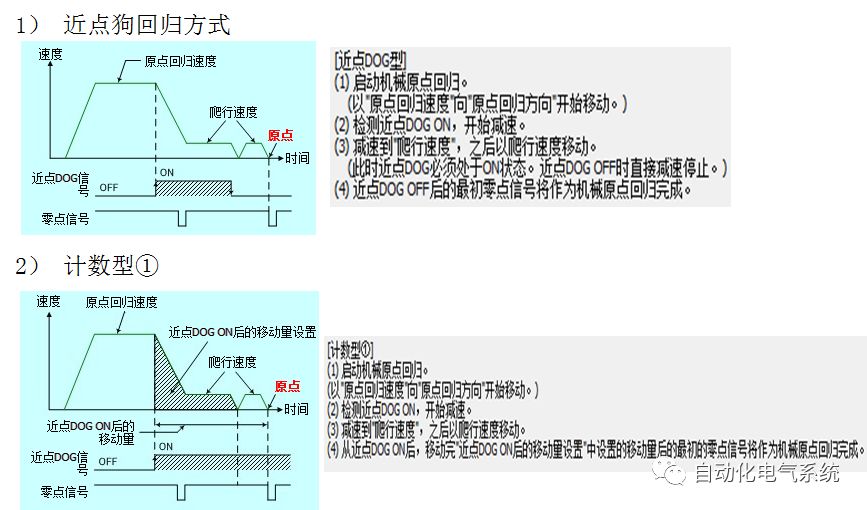
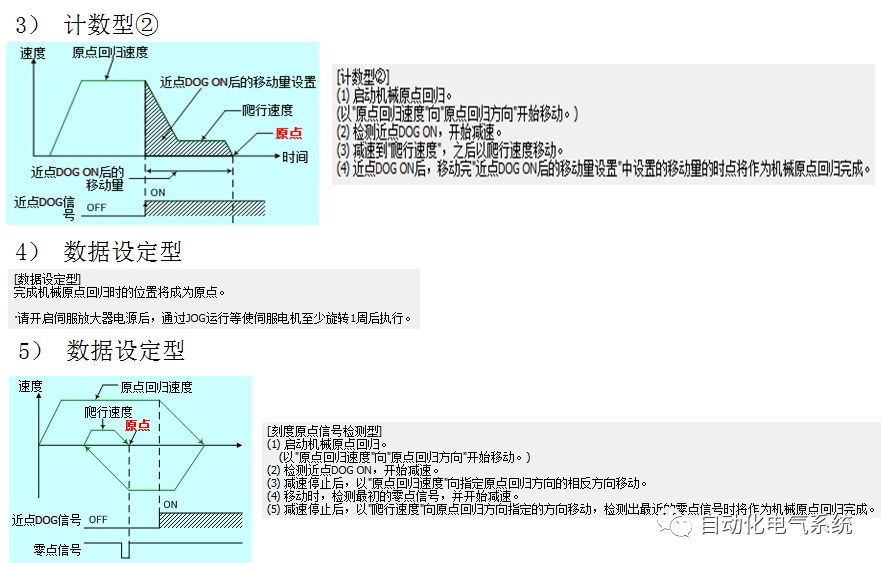
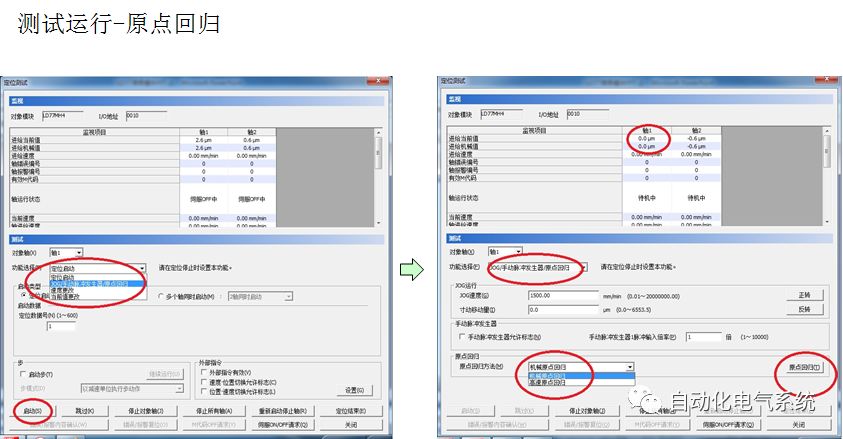
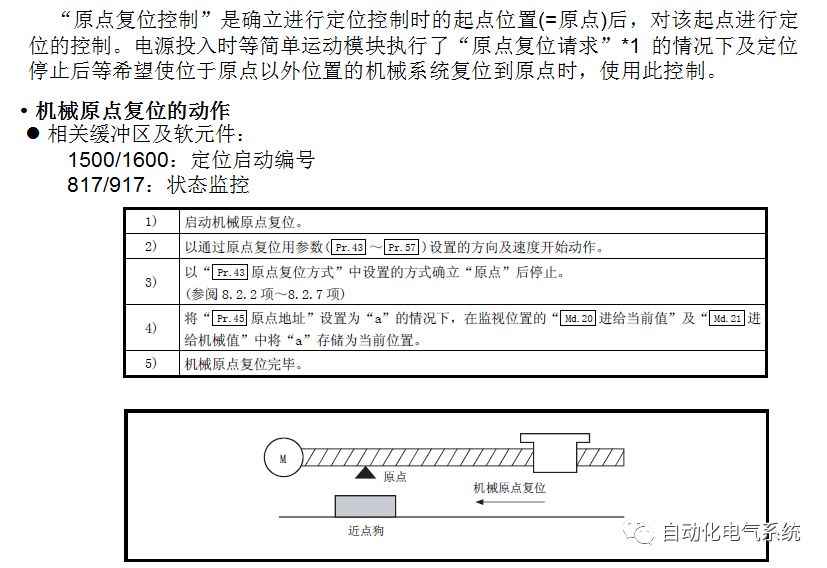
5.3原點(diǎn)復(fù)位控制
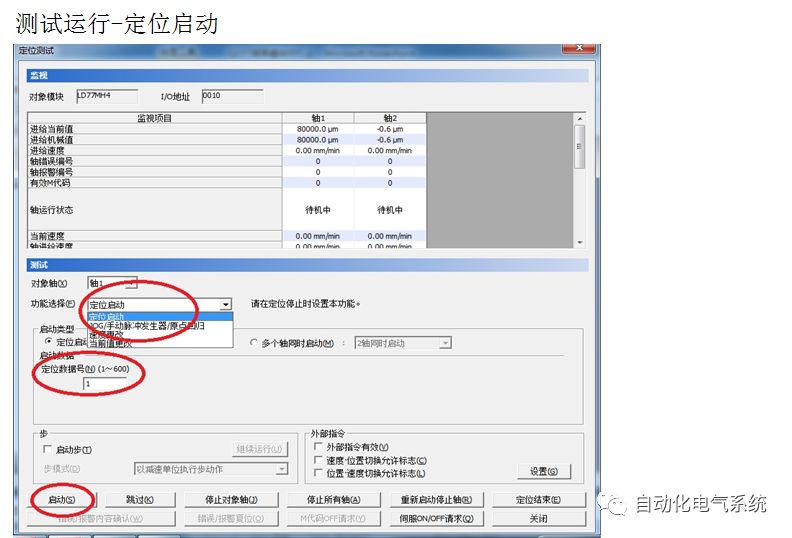
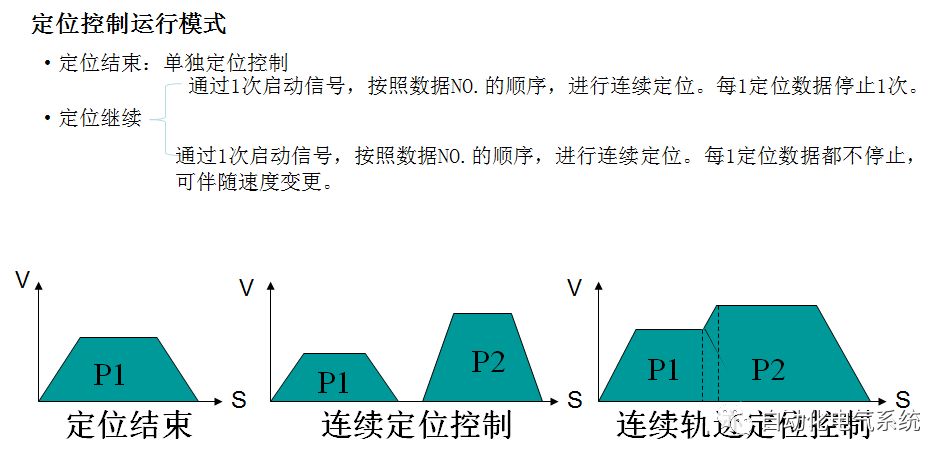
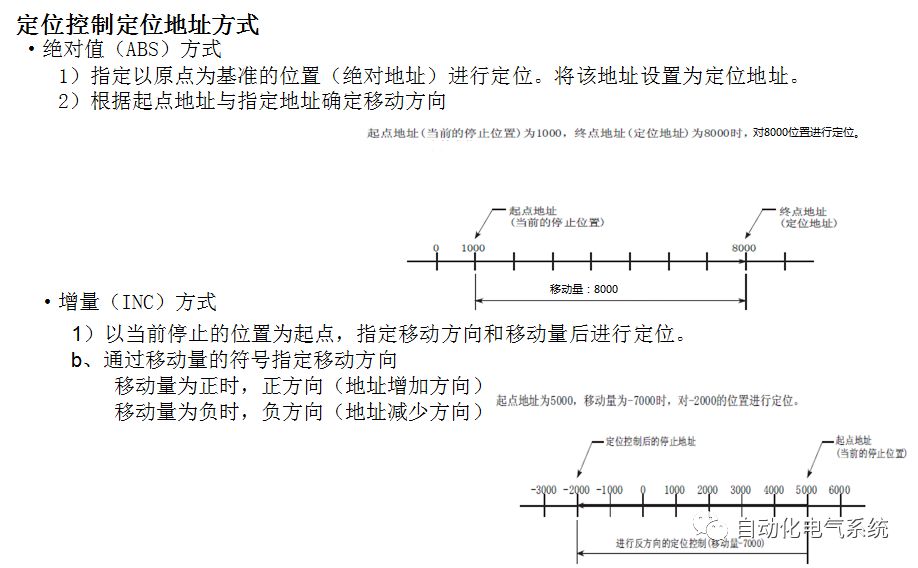
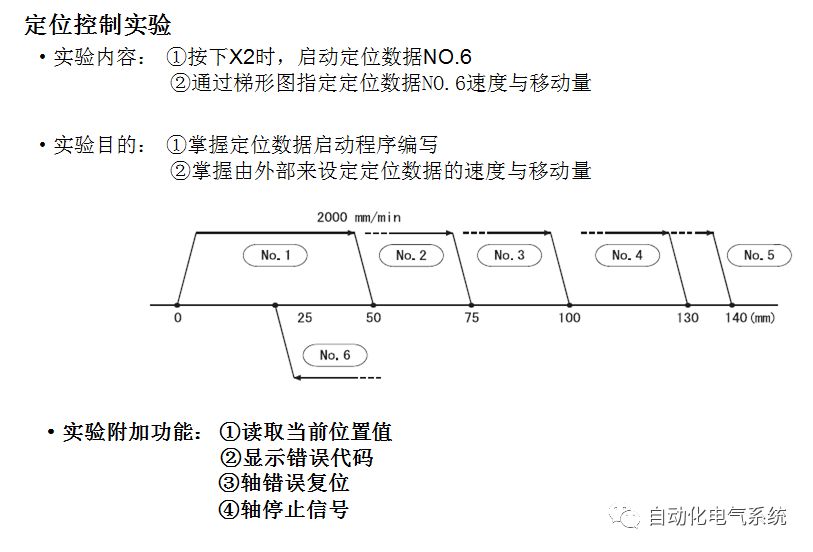
5.4定位控制
1)“定位控制”是使用簡單運(yùn)動(dòng)模塊中存儲(chǔ)的“定位數(shù)據(jù)”進(jìn)行的控制。
2)位置控制及速度控制等是通過該“定位數(shù)據(jù)”設(shè)置必要的項(xiàng)目后,通過啟動(dòng)該定位數(shù)據(jù)執(zhí)行的。
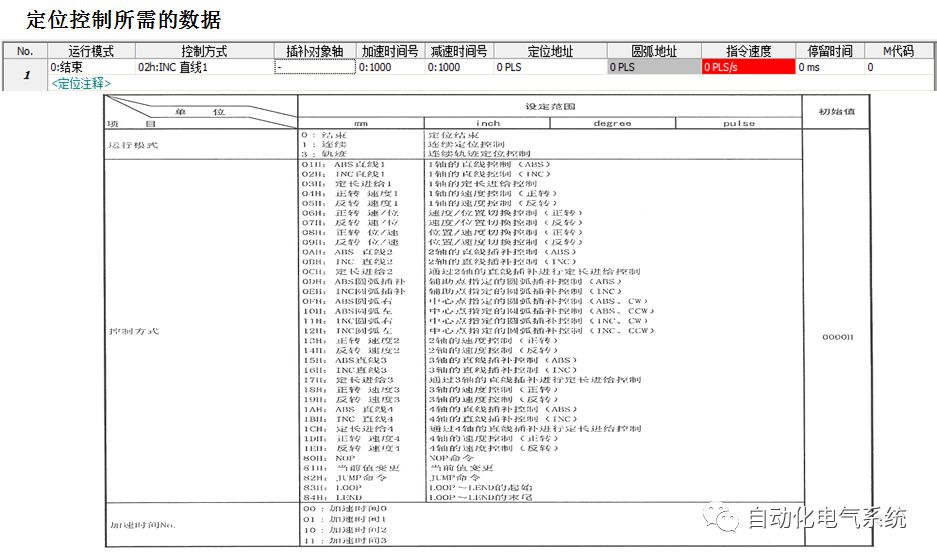
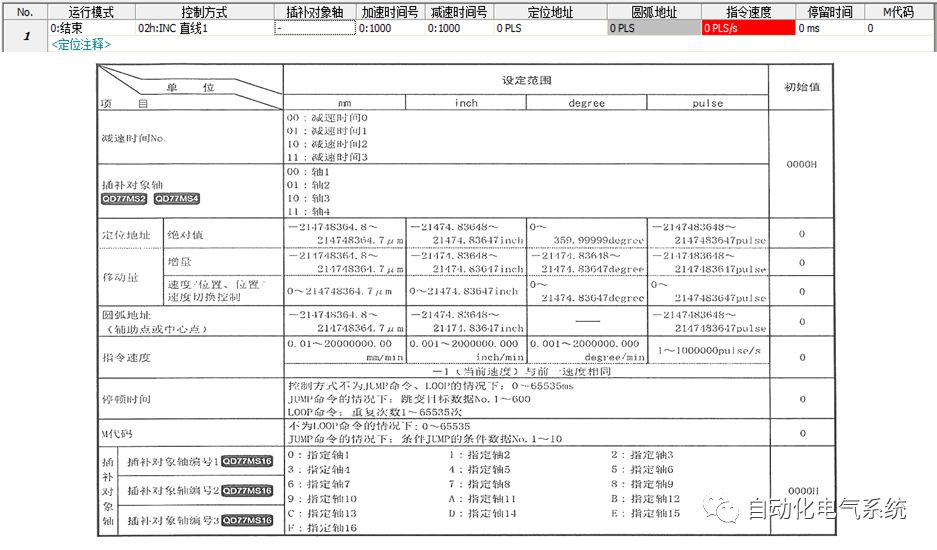
3)“主要定位控制”的控制方式是在定位數(shù)據(jù)的設(shè)置項(xiàng)目“Da.2控制方式”中設(shè)置。
定義為“主要定位控制”的控制是根據(jù)“Da.2控制方式”設(shè)置進(jìn)行如下所示的控制。但是,“Da.2控制方式”中設(shè)置的速度控制是對伺服放大器的指令中包括位置環(huán)路的速度控制。進(jìn)行不包括位置環(huán)路的速度控制時(shí),應(yīng)使用“速度·轉(zhuǎn)矩控制”。

黃色:插補(bǔ)控制的插補(bǔ)軸側(cè),因此不可設(shè)置
紅色:必須進(jìn)行設(shè)定的項(xiàng)目,未設(shè)定或出故障
灰色:無需設(shè)定(設(shè)置無效)
-:無需設(shè)定(設(shè)置無效)
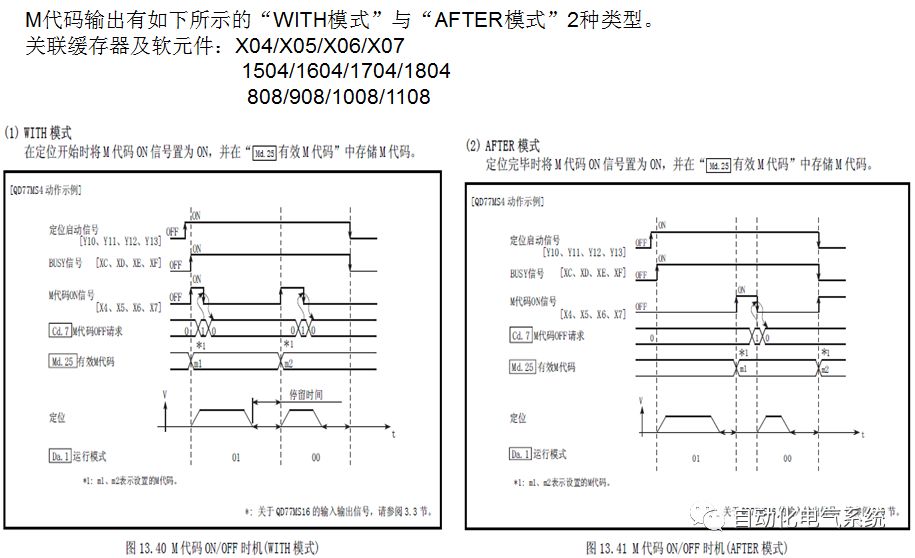
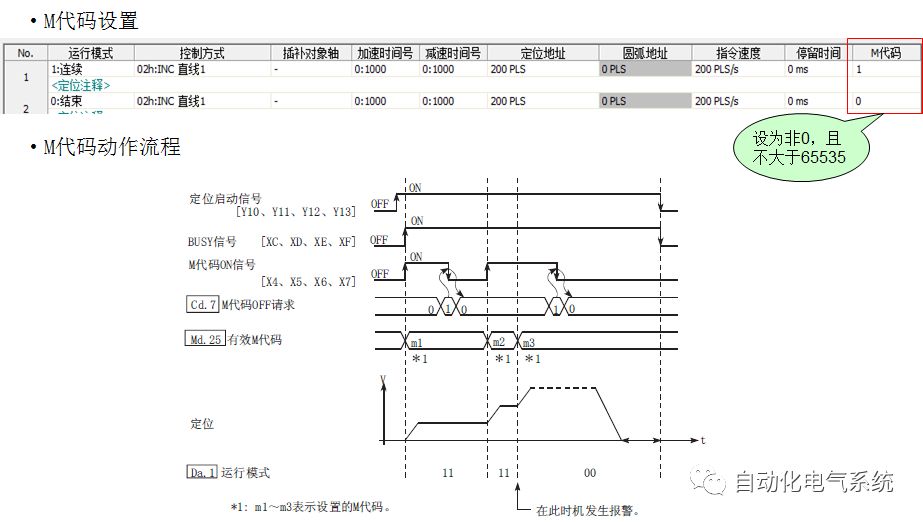
5.5M代碼輸出功能
“M代碼輸出功能”用于執(zhí)行對應(yīng)M代碼編號(hào)的輔助作業(yè)(停止夾緊或鉆孔、更換工具等)
指令的功能。每軸中,M代碼使用0-65535編號(hào),附加到定位數(shù)據(jù).
5.6動(dòng)作暫時(shí)停止與再啟動(dòng)
·暫時(shí)停止:通過軸停止信號(hào)ON,停止原點(diǎn)復(fù)位控制、定位控制、JOG運(yùn)行、
微動(dòng)運(yùn)行、手動(dòng)脈沖器運(yùn)行、速度·轉(zhuǎn)矩控制等。
·重啟指令:由于某種原因在途中停止了定位時(shí)(軸動(dòng)作狀態(tài)為“停止中”時(shí)),如果在
Cd.6中設(shè)置“1”,將從停止位置開始向停止的定位數(shù)據(jù)的終點(diǎn)再次進(jìn)行定位。
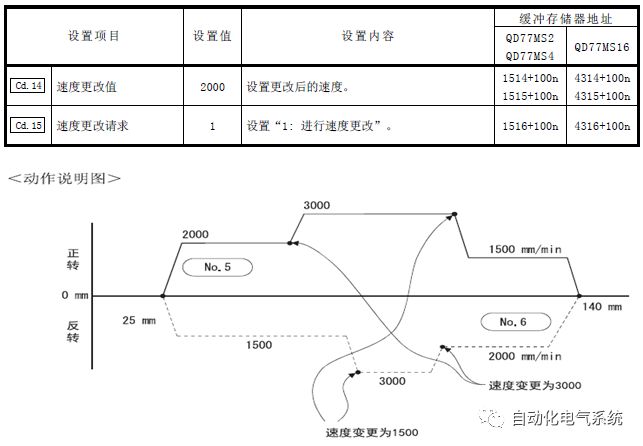
5.7定位控制中的速度更改
“速度更改功能” 是以任意時(shí)機(jī)將控制中的速度更改為新指定的速度的功能。
更改后的速度直接設(shè)置到緩沖存儲(chǔ)器中,并根據(jù)速度更改指令( Cd.15速度更改請求)
或者外部指令信號(hào)執(zhí)行速度更改。
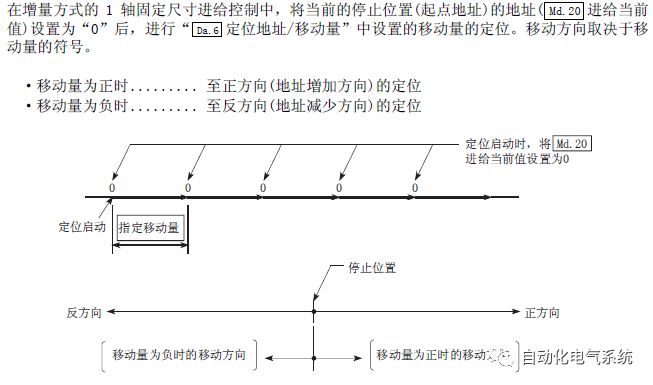
5.8定長進(jìn)給
·在“1軸定長進(jìn)給控制(“ Da.2控制方式”=定長進(jìn)給1)中,使用1個(gè)電機(jī)進(jìn)行設(shè)置的軸
方向的固定長度進(jìn)給控制。
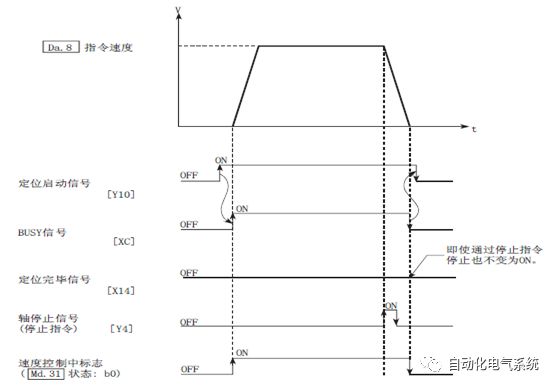
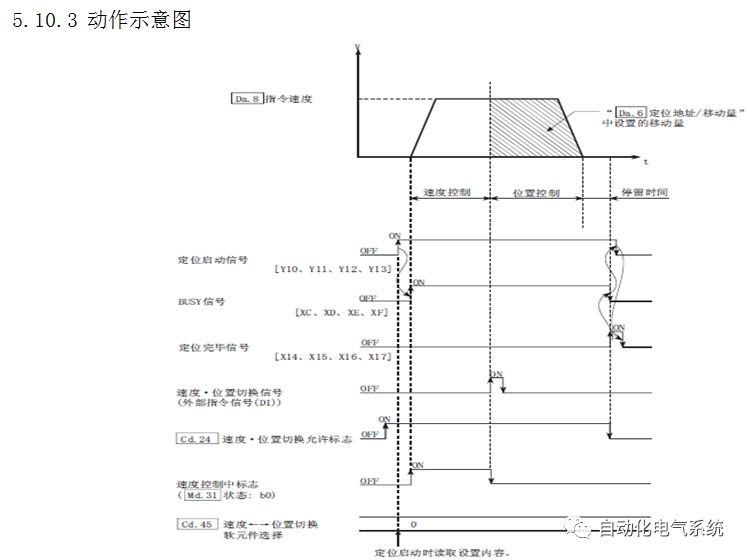
5.9速度控制
用于朝相同方向進(jìn)行無止境的運(yùn)行,如傳送帶、輸送機(jī)等的控制。
在“1軸速度控制”(“ Da.2控制方式”=正轉(zhuǎn)速度1、反轉(zhuǎn)速度1)中,沿著設(shè)置了定位數(shù)據(jù)的軸方向,連續(xù)輸出“Da.8指令速度”中設(shè)置的速度的脈沖進(jìn)行控制直至輸入停止指令為止。
1軸速度控制有向正轉(zhuǎn)方向啟動(dòng)的“正轉(zhuǎn)速度1”和向反轉(zhuǎn)方向啟動(dòng)的“反轉(zhuǎn)速度1”2種。
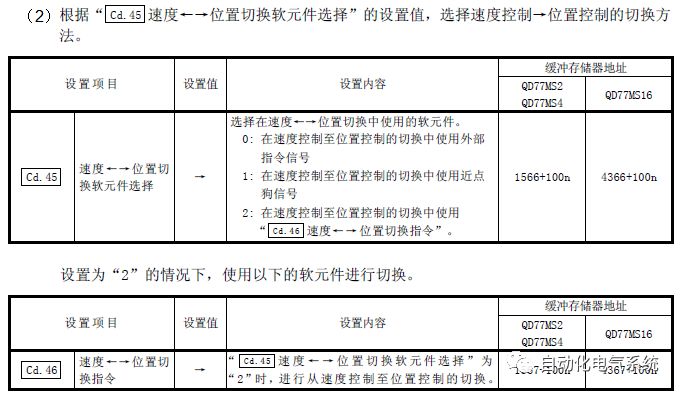
5.10速度·位置切換模式

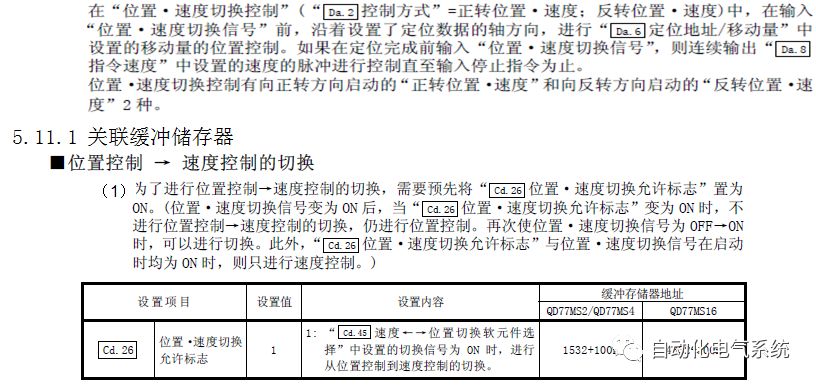
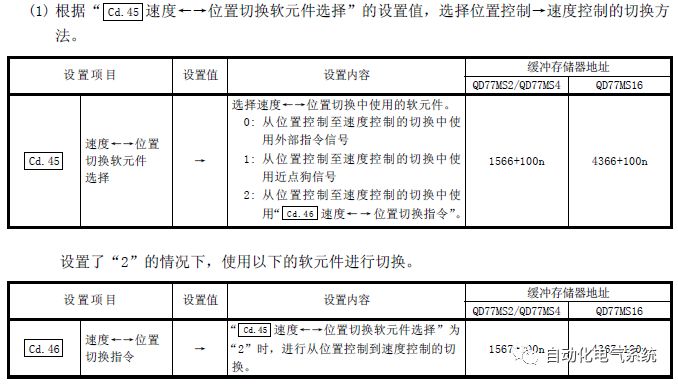
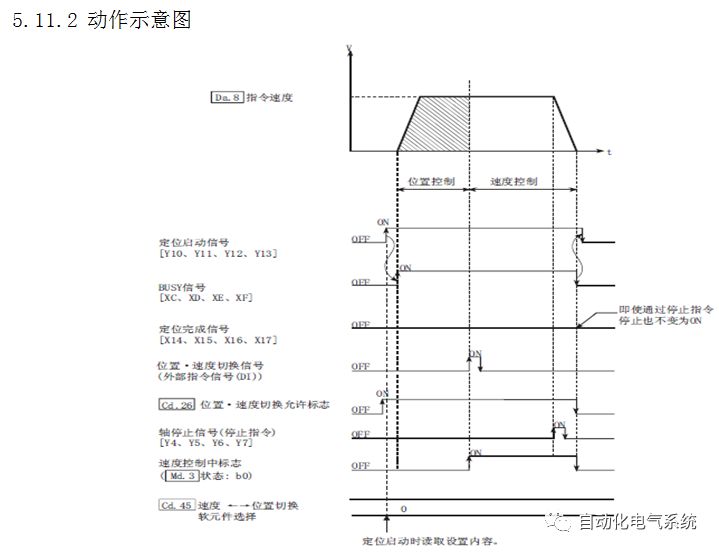
5.11位置·速度切換模式
6. 通過順控程序?qū)嵤┑?軸定位運(yùn)行
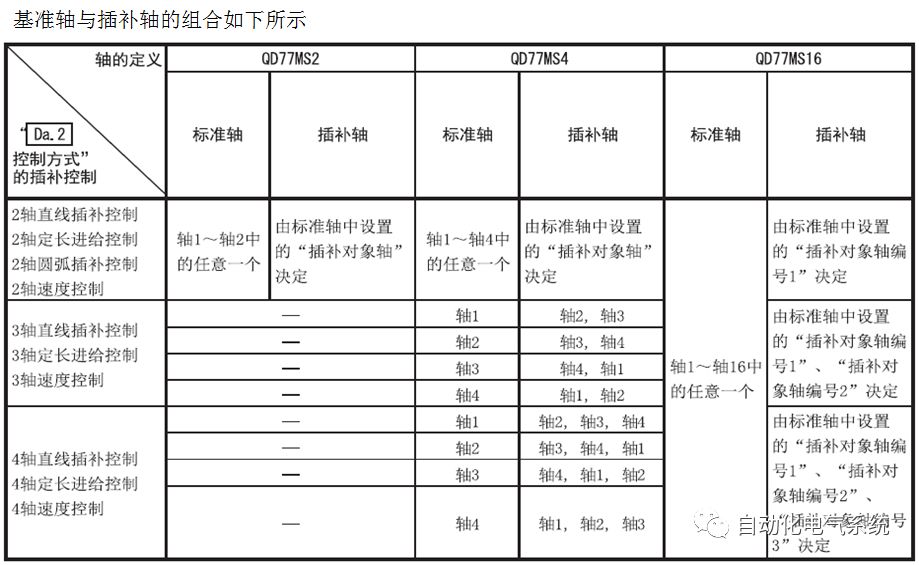
6.1什么是插補(bǔ)控制
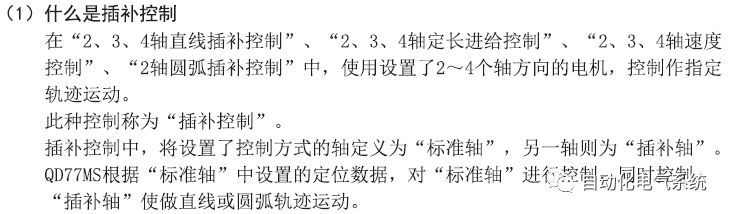
·插補(bǔ)控制注意事項(xiàng)
1)啟動(dòng)插補(bǔ)控制時(shí),啟動(dòng)標(biāo)準(zhǔn)軸,無須啟動(dòng)插補(bǔ)軸
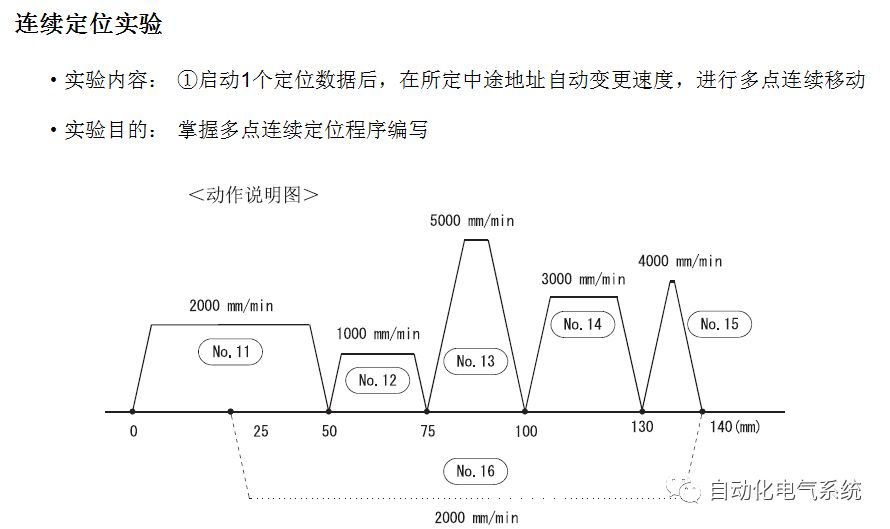
2)當(dāng)運(yùn)行模式指定為“連續(xù)定位控制”“連續(xù)軌跡控制”并進(jìn)行插補(bǔ)控制時(shí),須在所有的定位數(shù)據(jù)的控制方式中設(shè)置插補(bǔ)控制。
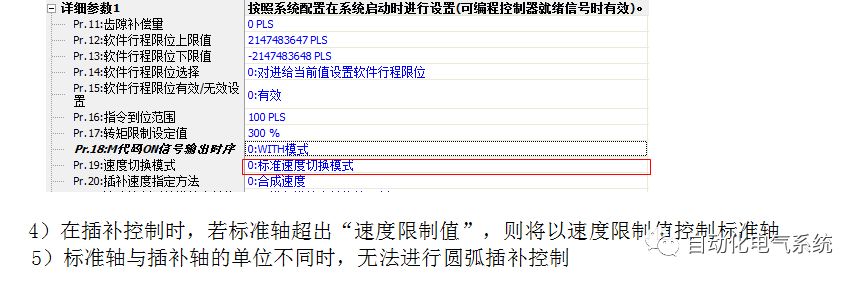
3)插補(bǔ)控制時(shí)的速度可指定為“合成速度”或“標(biāo)準(zhǔn)軸速度”中的一個(gè)。
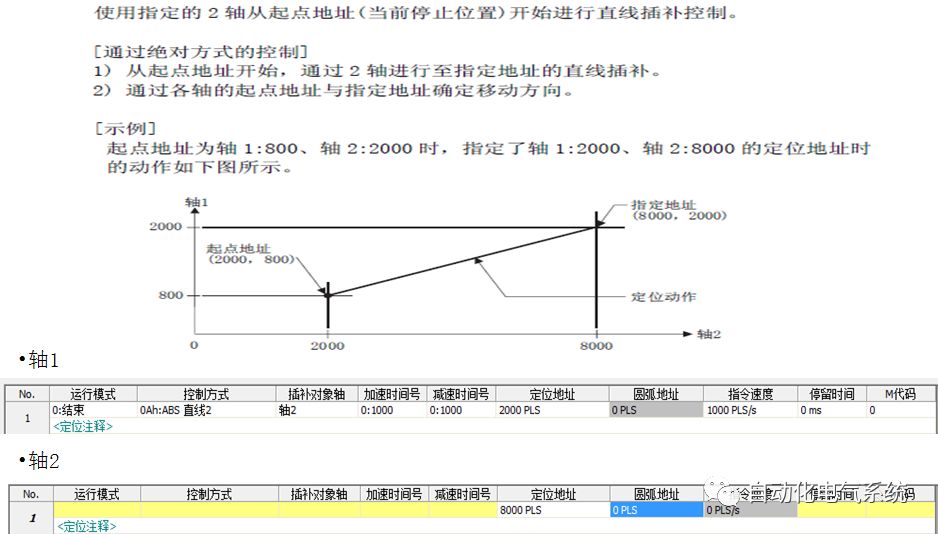
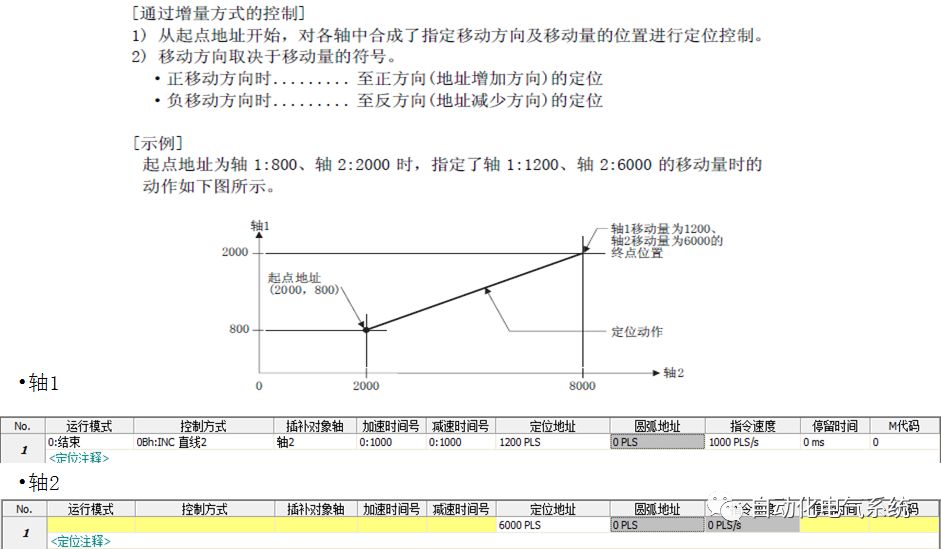
6.2 2軸直線插補(bǔ)控制
6.3 2軸圓弧插補(bǔ)控制
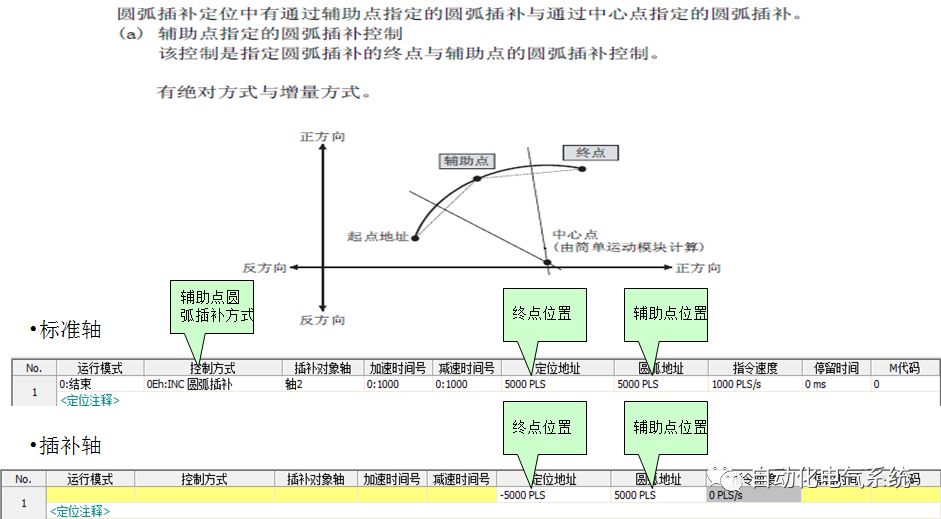
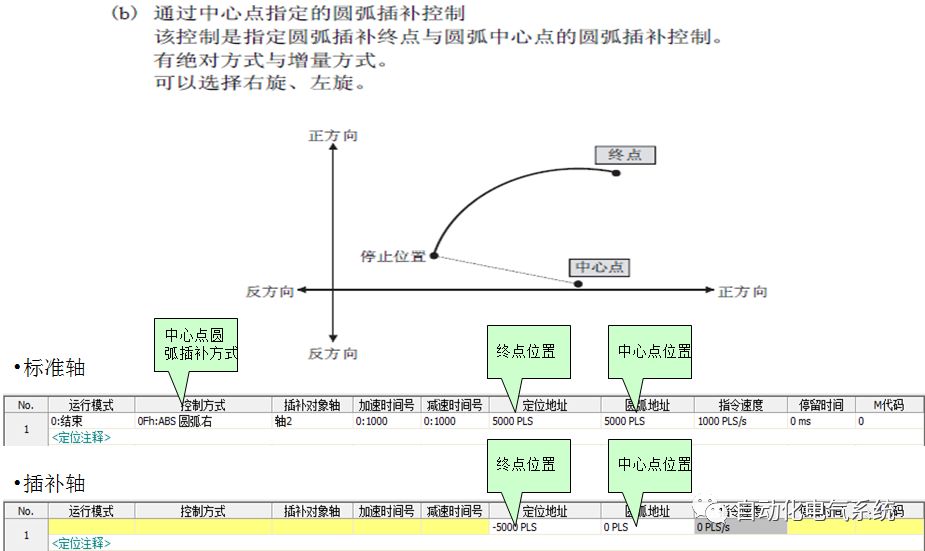
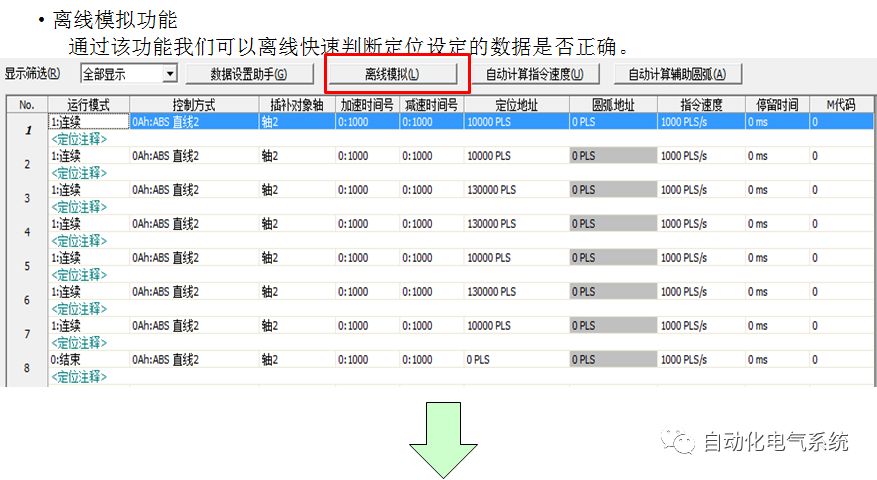
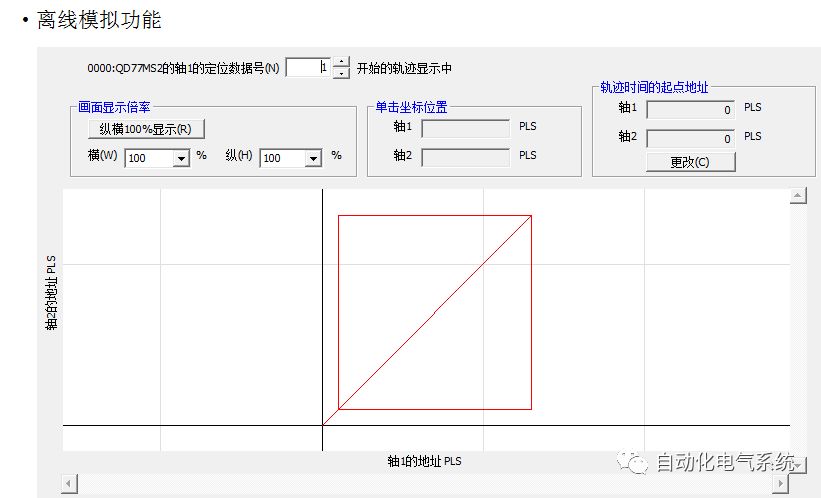
6.4綜合應(yīng)用
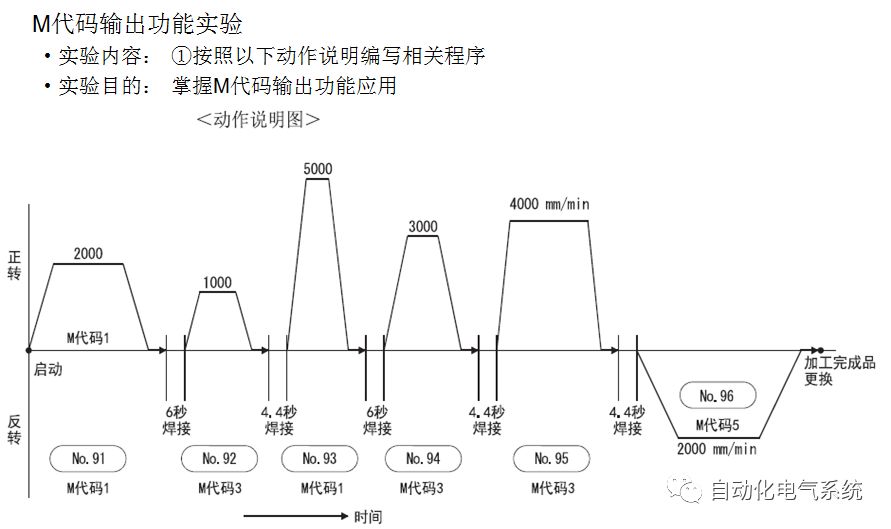
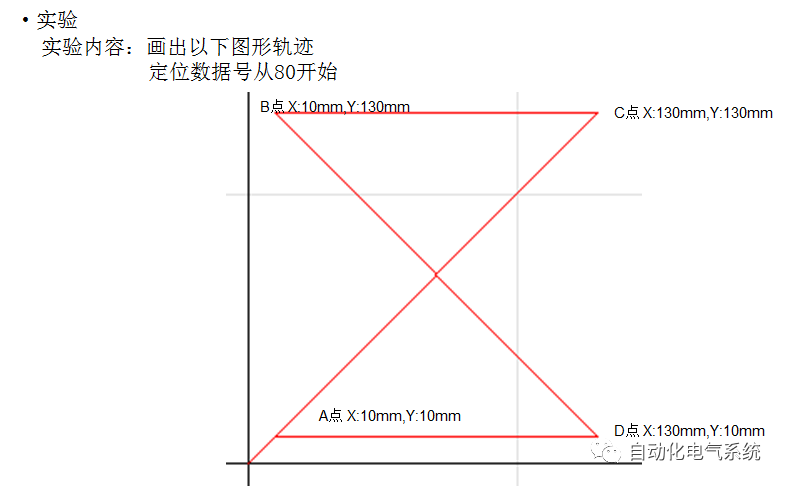
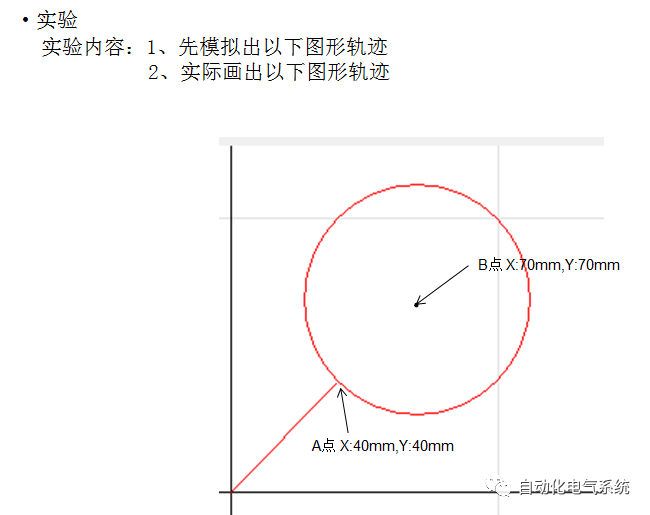
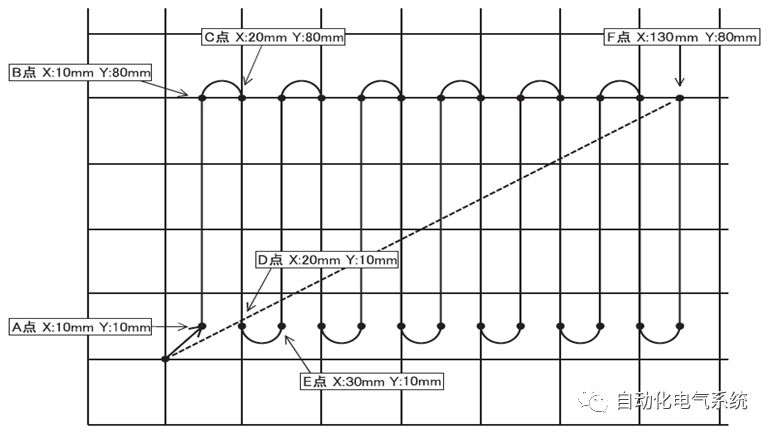
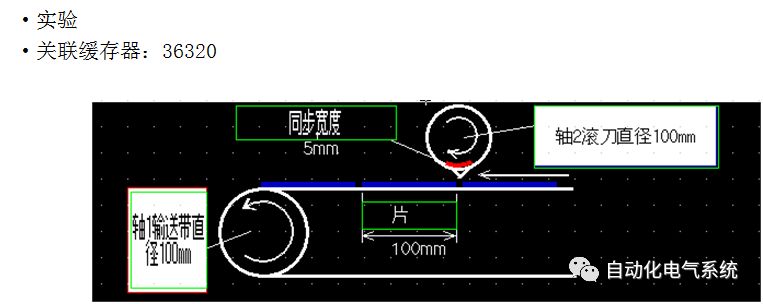
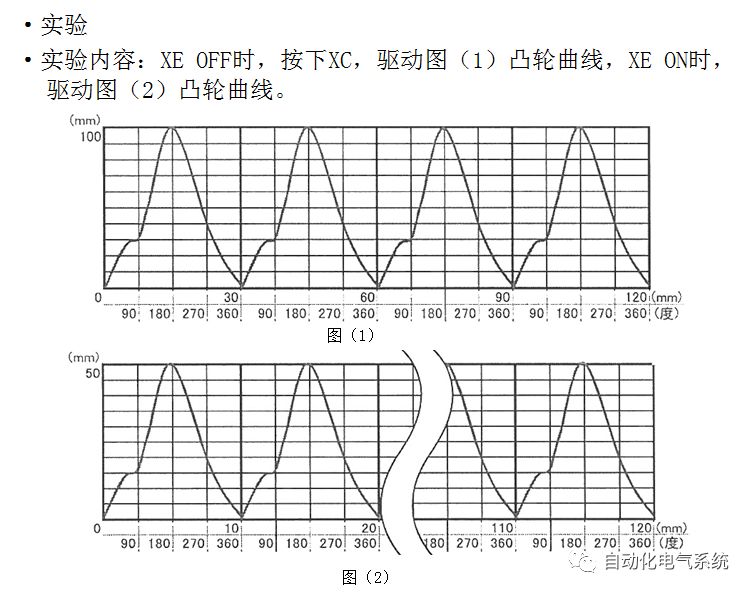
·實(shí)驗(yàn)
實(shí)驗(yàn)內(nèi)容:畫出以下圖形軌跡
·實(shí)驗(yàn)?zāi)康模?)掌握塊啟動(dòng)
2)綜合掌握直線與圓弧插補(bǔ)應(yīng)用
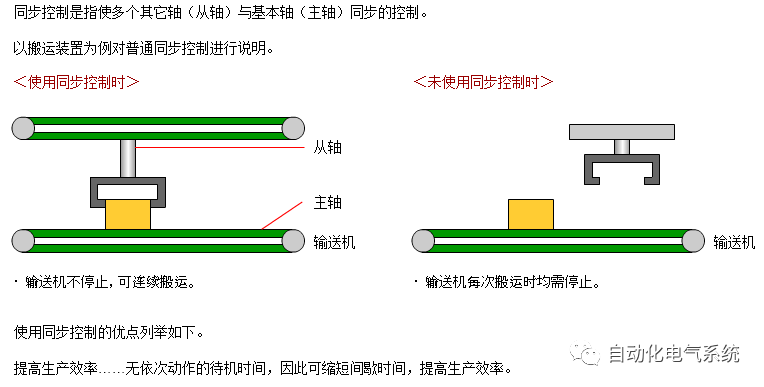
7. 通過順控程序?qū)嵤┑耐竭\(yùn)
7.1 同步運(yùn)行定義
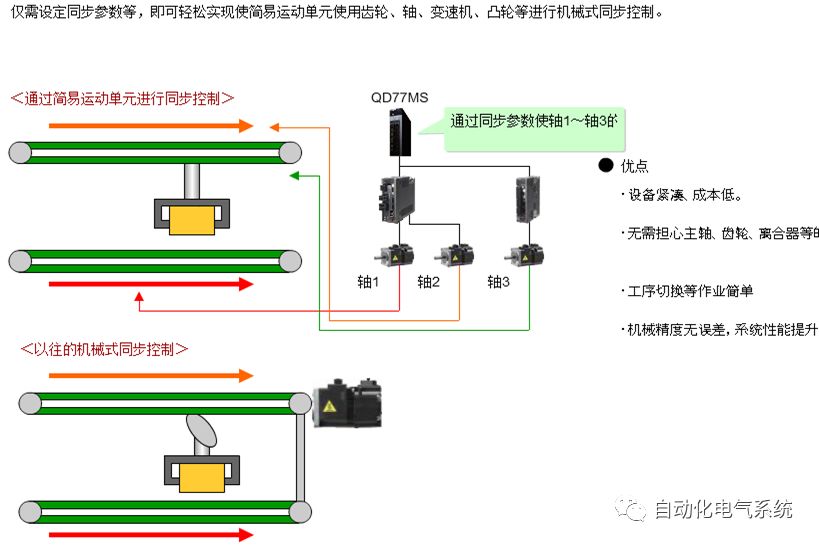
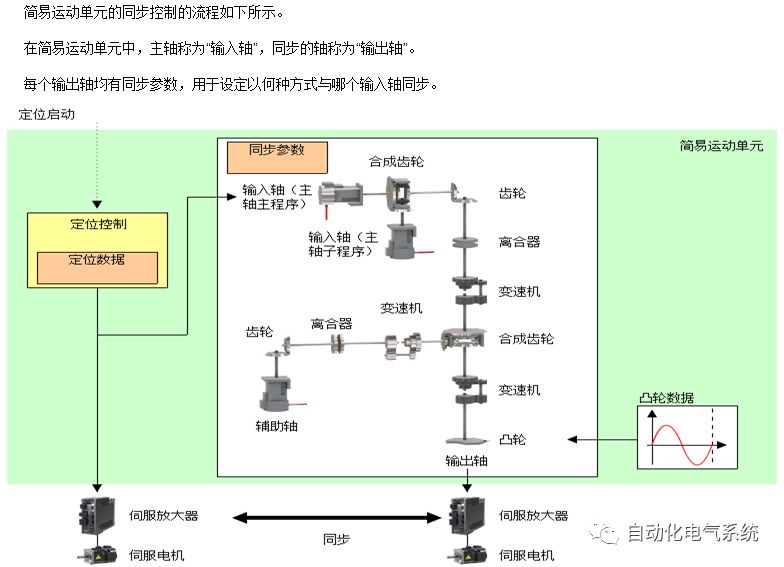
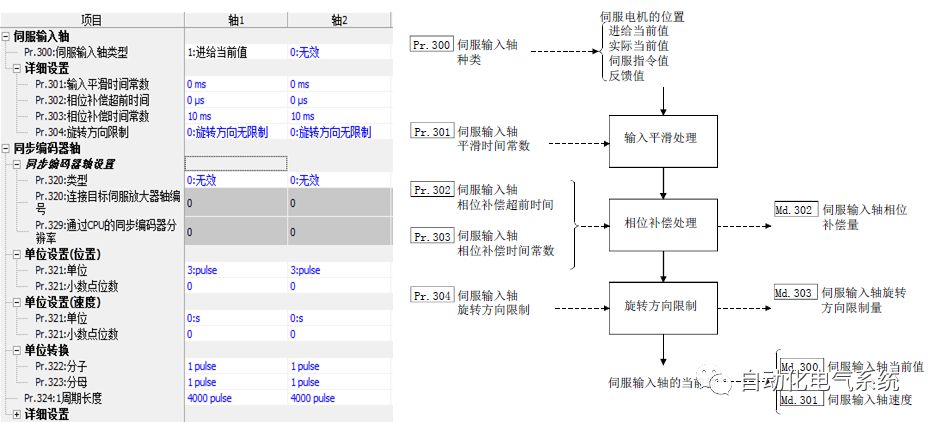
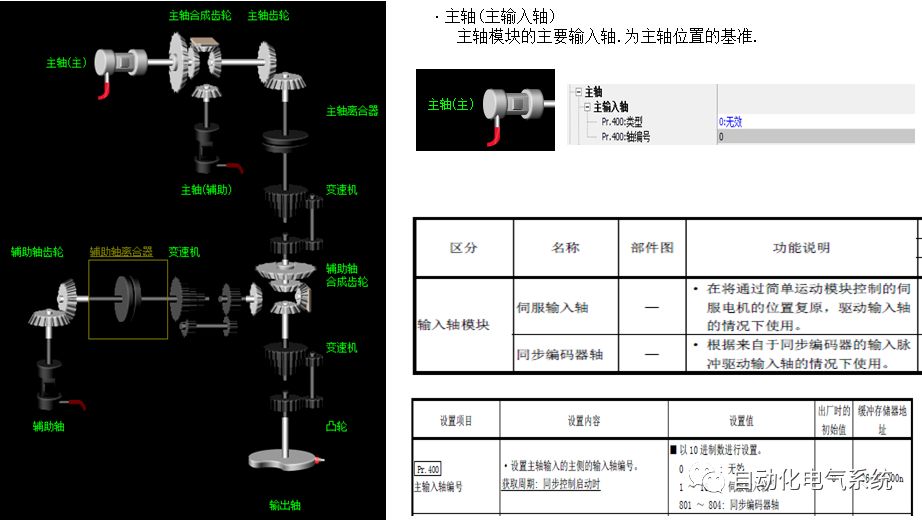
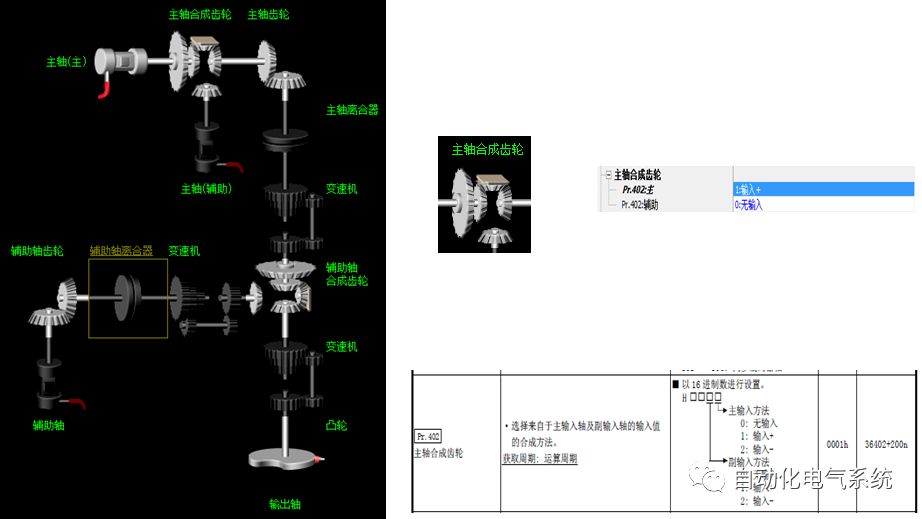
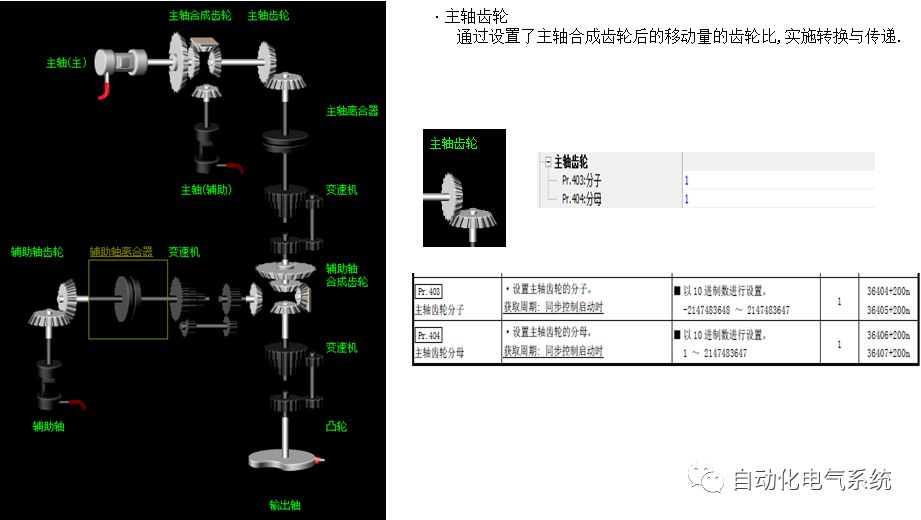
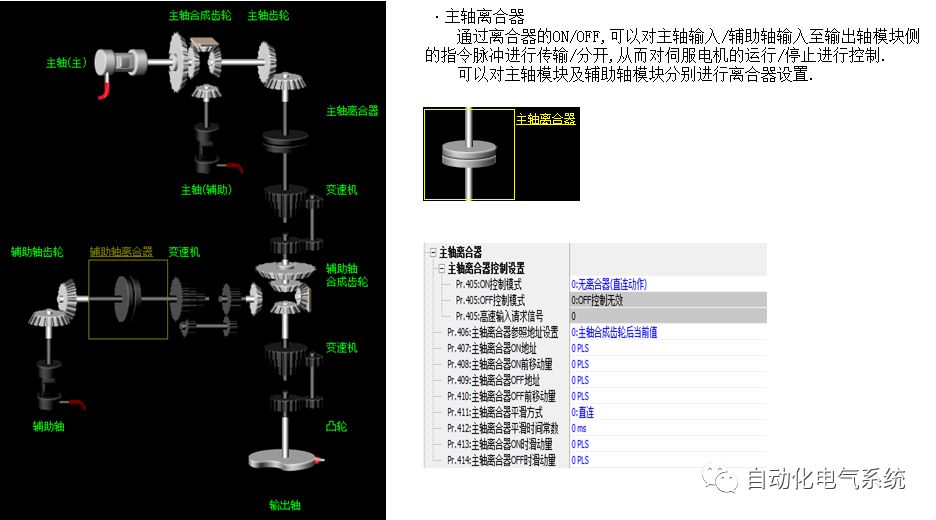
7.2同步控制用模塊介紹

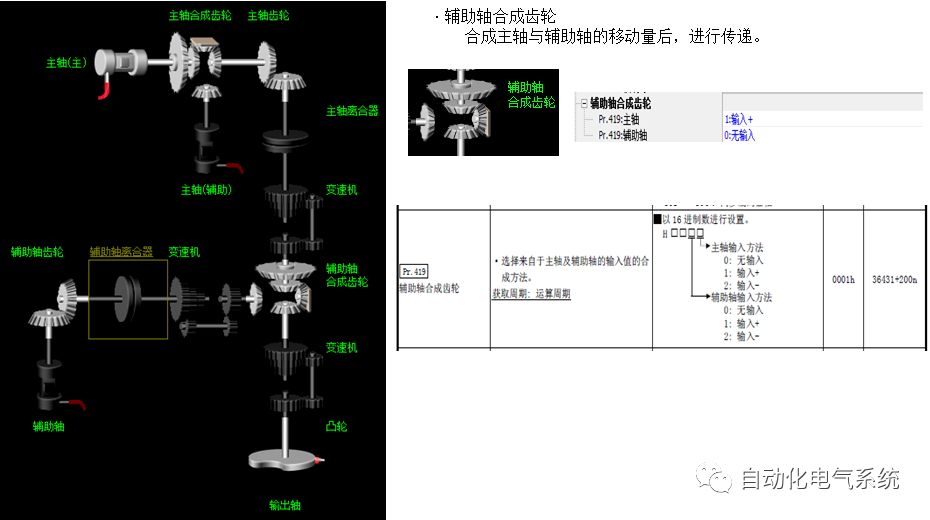
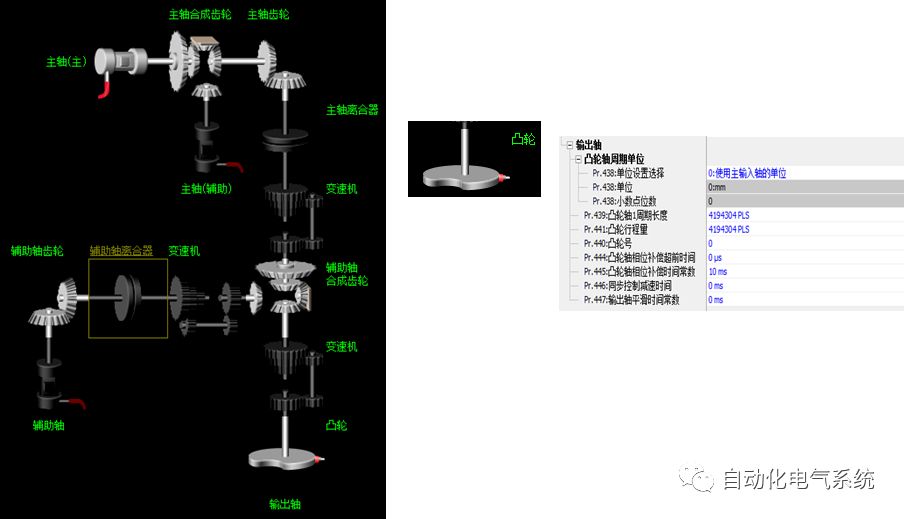
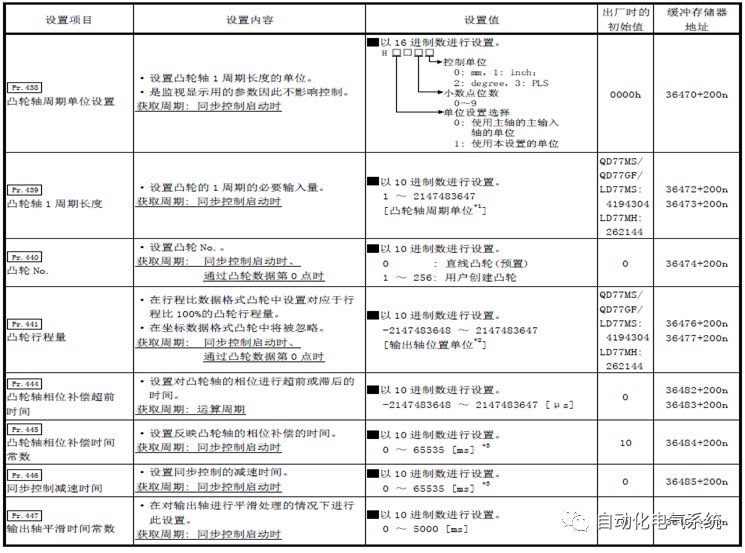
7.3凸輪數(shù)據(jù)
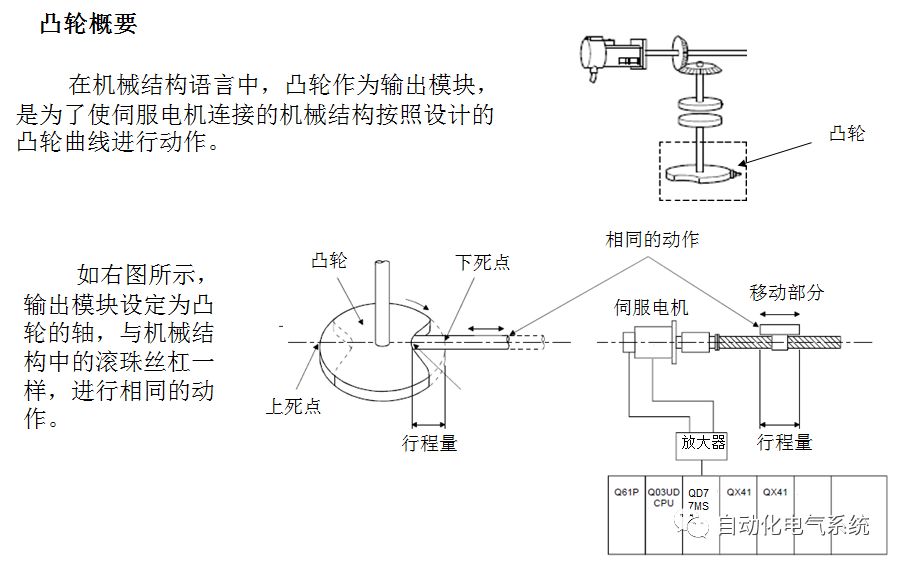
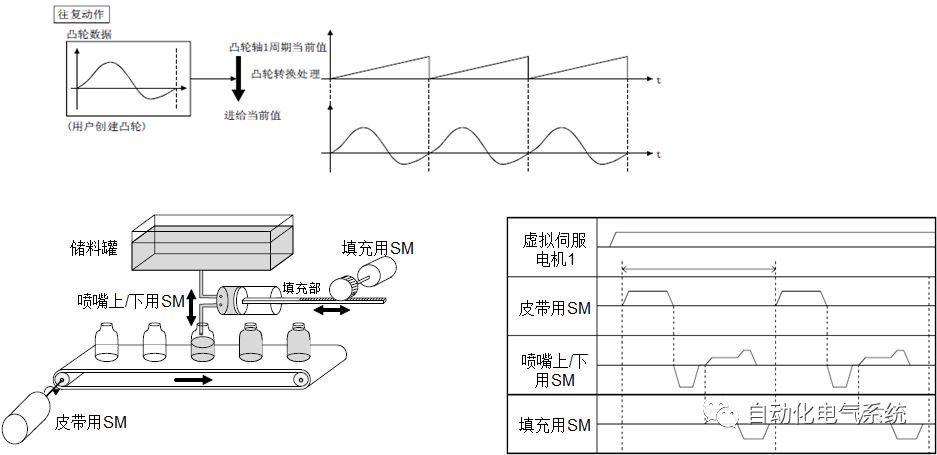
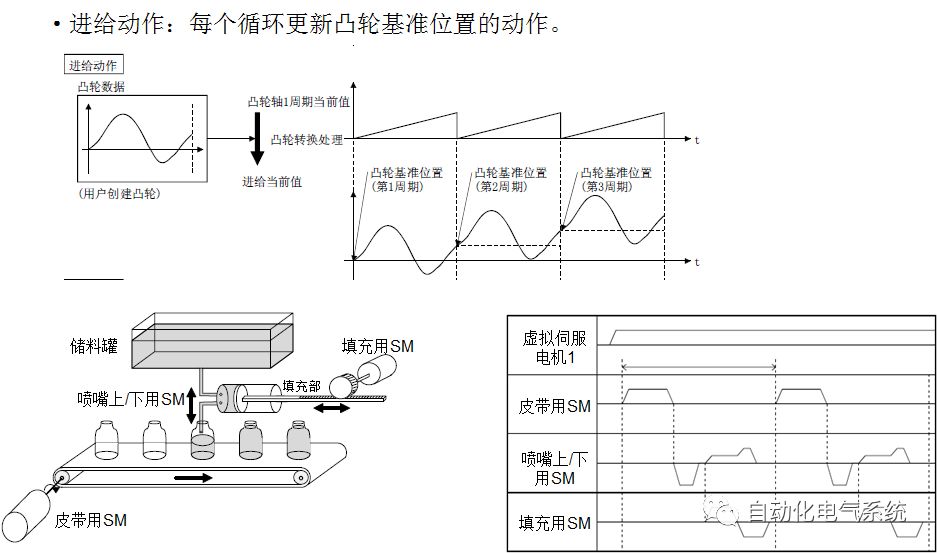
凸輪動(dòng)作
同步控制的輸出軸作凸輪動(dòng)作。有往復(fù)動(dòng)作、進(jìn)給動(dòng)作、直線動(dòng)作這三種模式。
·往復(fù)動(dòng)作:在一定的凸輪行程范圍內(nèi)往復(fù)的動(dòng)作
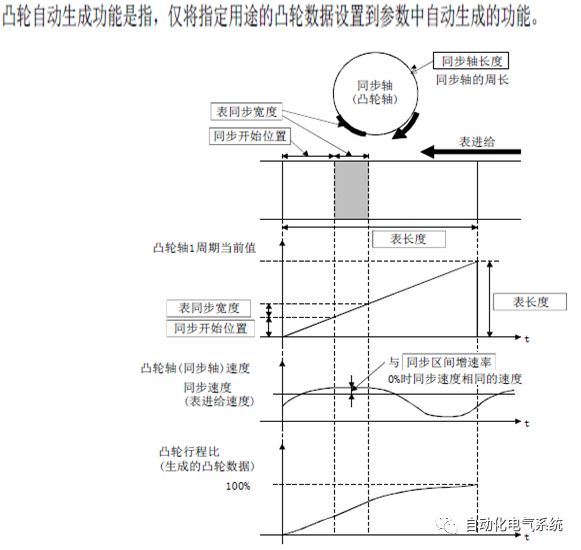
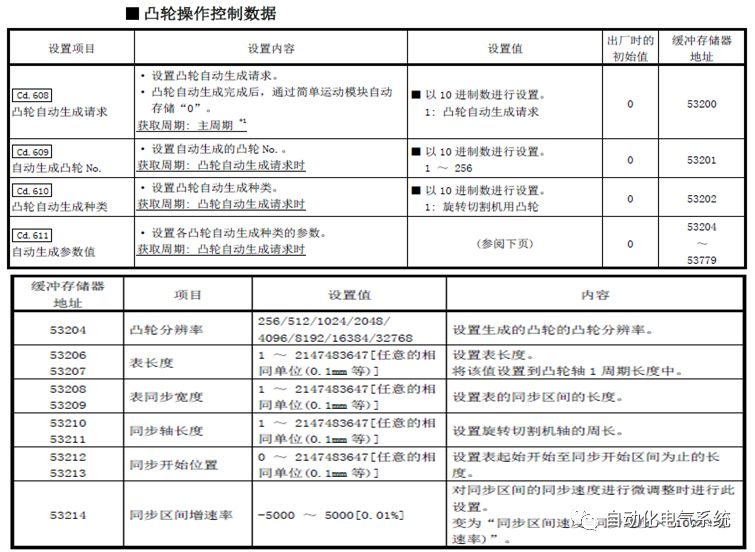
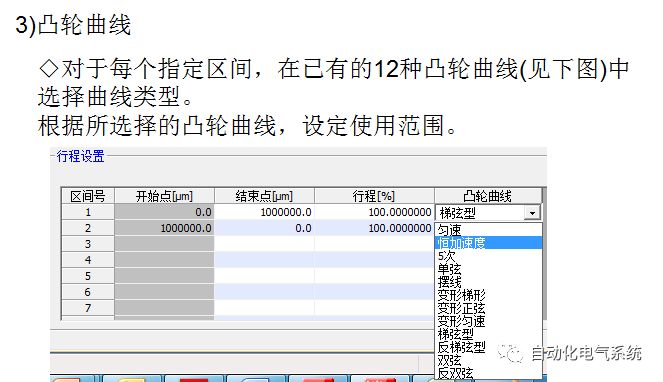
7.4凸輪自動(dòng)生成功能
7.5自建凸輪數(shù)據(jù)
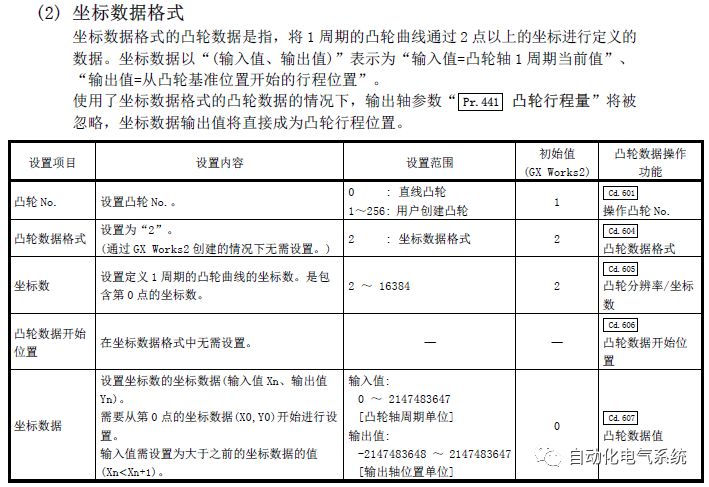
·凸輪數(shù)據(jù)分成行程比數(shù)據(jù)格式與坐標(biāo)數(shù)據(jù)格式2種。

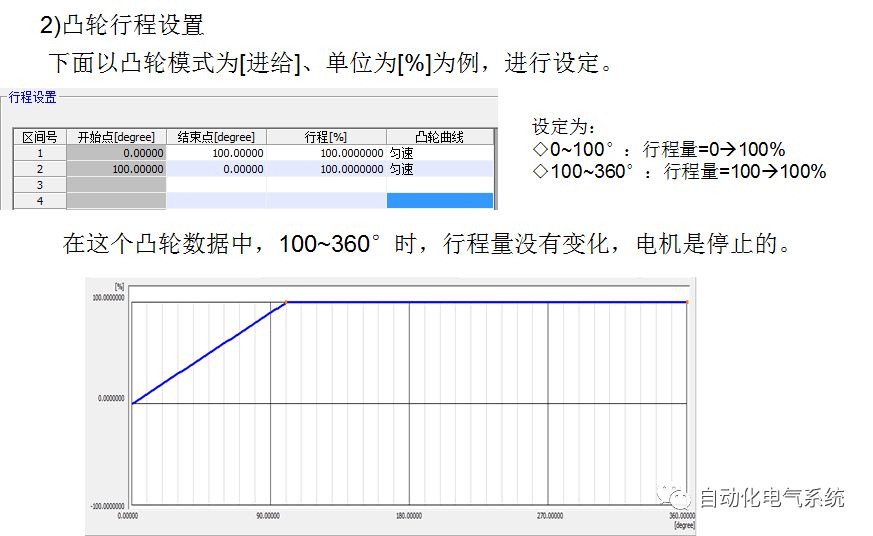

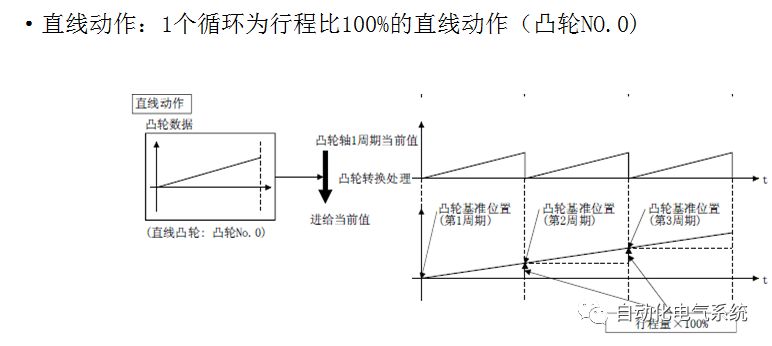
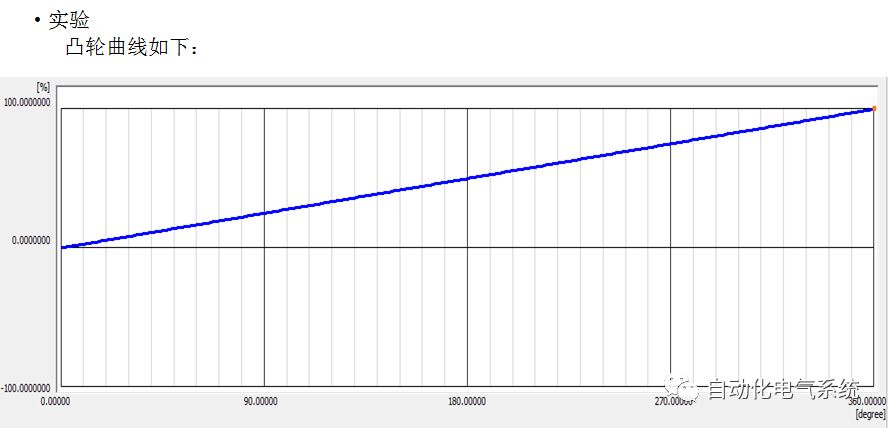
7.6直線動(dòng)作凸輪數(shù)據(jù)
小
-
定位控制
+關(guān)注
關(guān)注
0文章
26瀏覽量
10335 -
伺服放大器
+關(guān)注
關(guān)注
3文章
43瀏覽量
13970 -
定位模塊
+關(guān)注
關(guān)注
0文章
106瀏覽量
16411
原文標(biāo)題:三菱PLC-QD77定位模塊簡易運(yùn)動(dòng)單元應(yīng)用
文章出處:【微信號(hào):GKYXT1508,微信公眾號(hào):工控云學(xué)堂】歡迎添加關(guān)注!文章轉(zhuǎn)載請注明出處。
發(fā)布評(píng)論請先 登錄
相關(guān)推薦
福州回收Q系列三菱PLC,回收三菱QD77MS4,三菱可編程控制器回收公司
回收拆機(jī)三菱plc FX3U可編程控制器,三菱通訊模塊長期回收
三菱plc應(yīng)用指令
三菱PLC編程實(shí)例項(xiàng)目例程-包裝機(jī)三菱PLC程序
三菱PLC編程實(shí)例項(xiàng)目例程:三菱qd75定位模塊程序
三菱plc型號(hào)大全
三菱plc讀取時(shí)鐘程序_三菱plc怎么讀取程序

三菱PLC遠(yuǎn)程下載程序
三菱Q系列QD77MS2 PLC控制程序免費(fèi)下載
三菱plc與西門子plc編程有什么不同?
三菱PLC編程實(shí)例之例程編寫的QD75D1控制三菱伺服馬達(dá)
三菱PLC控制伺服馬達(dá)步驟介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論