 ROS開發技術的twist_mux功能包的原理和使用方法,靈活使用鎖配置
ROS開發技術的twist_mux功能包的原理和使用方法,靈活使用鎖配置
twist_mux的原理類似于RTOS中的任務調度,需要為每個輸入的話題設置優先級,不同話題也可以設置為同樣的優先級,但是并不推薦這樣做。除了優先級機制外,twist_mux還可以根據超時限制、外部鎖話題(lock topics)來限制輸入話題的選擇。
我們在做機器人ROS開發時,常常會遇到相同速度控制消息的選擇問題。比如說控制機器人移動的geometry_msgs::Twist消息,可以使用鍵盤節點發布,可以使用手柄節點發布,也可以在導航過程中由movebase發布,那么這些節點同時運行時,多個節點發布相同的速度控制話題,這個時候機器人就迷茫了,到底該聽誰的呢?只能收到哪個數據就聽誰的。
針對這樣的問題,ROS提供了一種mux多路切換器——twist_mux,可以幫助我們切換到希望接收的數據源上。
— 原理—
正如我們開篇描述的場景,當機器人接收到不同節點發布的速度控制消息時,該如何進行選擇呢?
回想一下RTOS中的任務調度原則,每個任務都有自己的優先級,當有多個任務進入等待狀態時,系統會選擇優先級最高的任務執行,很多系統還支持同等優先級的任務,此時系統會按照時間片輪詢的方式執行任務,也就是不偏不倚,平等對待相同優先級的任務。
twist_mux的原理類似于RTOS中的任務調度,需要為每個輸入的話題設置優先級,不同話題也可以設置為同樣的優先級,但是并不推薦這樣做。
除了優先級機制外,twist_mux還可以根據超時限制、外部鎖話題(lock topics)來限制輸入話題的選擇。
twist_mux功能包中的核心節點就是twist_mux,其輸入、輸出如下:
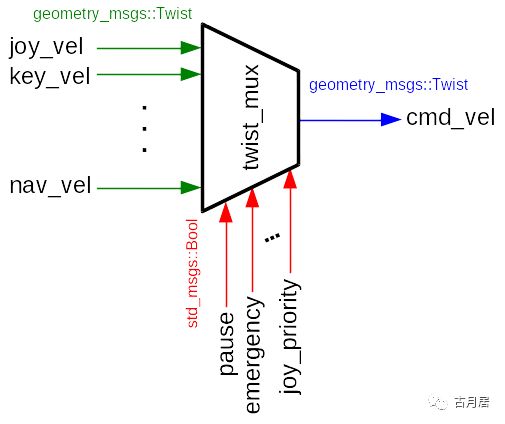
左側輸入的是多個geometry_msgs::Twist類型的話題,通過twist_mux的選擇后,輸出唯一的geometry_msgs::Twist話題。下方輸入的話題就是用戶動態配置選擇機制的鎖話題,話題的消息類型是Bool,正如鎖一樣,只有打開和關閉兩種狀態。
這里鎖的概念可以理解為:通過限制不同優先級的輸入源,達到控制輸出的效果。
— 配置—
twist_mux功能包的安裝一句話就可以搞定:
sudo apt-getinstallros-indigo-twist-mux
然后就可以運行多路切換器了:
roslaunchtwist_muxtwist_mux.launch
打印當前的話題列表可以看到:
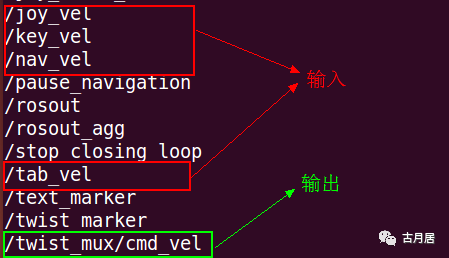
再來看一下twist_mux.launch文件里邊到底干了啥:
可以看到,在launch文件中配置了一些話題名參數,在啟動twist_mux節點的過程中還加載了兩個配置文件,twist_mux_topics.yaml對應的就是輸入話題的配置,twist_mux_locks.yaml對應的是鎖話題的配置。
1. twist_mux_topics.yaml
#Input topics handled/muxed.#For each topic:#- name : name identifier to select the topic#- topic : input topic of geometry_msgs::Twisttype#- timeout : timeoutinseconds to start discarding old messages, and use 0.0 speed instead#- priority: priorityinthe range [0, 255]; the higher the more priority over other topicstopics:-name : navigationtopic : nav_veltimeout : 0.5priority: 10-name : joysticktopic : joy_veltimeout : 0.5priority: 100-name : keyboardtopic : key_veltimeout : 0.5priority: 90-name : tablettopic : tab_veltimeout : 0.5priority: 100
該配置文件中包含了一個輸入話題的配置列表,每個輸入話題的配置項包含以下幾個:
name:一個用戶可讀的命名,不是話題名,只用于調試顯示;
topic:話題名,話題必須是geometry_msgs::Twist類型;
timeout:消息允許的超時限制,超過此時間仍然沒有數據后,會切換到其他輸入話題上,如果設置為0的話,相當于沒有限制,會無限等待;
priority:輸入話題的優先級,0~255之間,值越大優先級越高
2. twist_mux_locks.yaml
#Locks to stop the twist inputs.#For each lock:#- topic : input topic that provides the lock; it must be oftypestd_msgs::Bool?!!!#- timeout : == 0.0 -> not used# > 0.0 -> the lock is supposed to published at a certain frequencyinorder# to detect that the publisher is alive; the timeoutinseconds allows# to detect that, andifthe publisher dies we willenablethe lock#- priority: priorityinthe range [0, 255], so all the topics with priority lower than it# will be stopped/disabledlocks:-name : pausetopic : pause_navigationtimeout : 0.0#Same priority as joystick control, so it'll not block it.priority: 100-name : loop_closuretopic : stop_closing_looptimeout : 0.0priority: 200-name : joysticktopic : joy_prioritytimeout : 0.0priority: 100
關于鎖話題的配置也是一個列表,每一個子項都是一個鎖話題的配置,配置項包含以下幾個:
name:一個用戶可讀的命名,不是話題名,只用于調試顯示;
topic:鎖話題名,消息類型必須是std_msgs::Bool類型;
timeout:鎖話題需要按周期發布,所以超過時間限制后,會認為發布鎖的節點掉線了,鎖失效,類似于看門狗的功能;如果設置為0的話,則沒有超時限制,持續有效;
priority:限制輸入話題的優先級,0~255之間,在此值以下優先級的話題,會被上鎖,開鎖之前無法輸出,以達到動態控制輸出的效果。
— 實踐—
現在我們就來通過實踐驗證一下twist_mux的效果。
首先啟動twist_mux節點:
roslaunchtwist_muxtwist_mux.launch
然后監聽最終輸出的速度控制消息:
rostopicecho/twist_mux/cmd_vel
1. 多輸入源的選擇
目前還沒有任何輸入,所以還不會有輸出的消息。
接著我們就可以發布幾個輸入的消息了,先發布一個導航輸出的速度消息:
rostopic pub -r10/nav_vel geometry_msgs/Twist"linear:x:1.0y:0.0z:0.0angular:x:0.0y:0.0z:0.0"
成功發布之后,輸出監聽并沒有任何輸出,這是因為在鎖消息中,我們設置的最小優先級是100,而nav_vel的優先級在配置文件中設置的是10,自然被擋到了門外,沒辦法輸出。
再來發布joy_vel消息:
rostopic pub -r10/joy_vel geometry_msgs/Twist"linear:x:2.0y:0.0z:0.0angular:x:0.0y:0.0z:0.0"
很快就可以在輸出監聽的終端中看到如下圖所示的joy_vel的消息了:
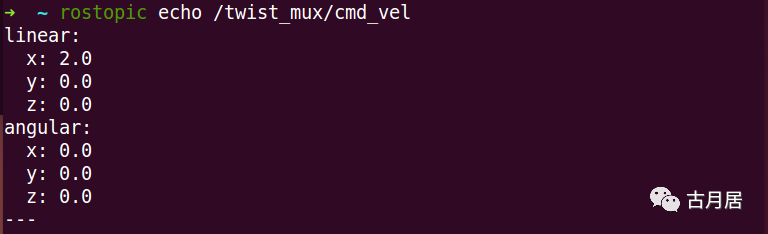
此時有nav_vel和joy_vel兩個輸入消息,經過twist_mux的選擇后,只輸出了joy_vel消息。
那么如果我們想要輸出nav_vel怎么辦呢?
在nav_vel和joy_vel兩個消息保持發布的狀態下,重新打開一個窗口,關閉優先級門檻的限制:
rostopicpub /joy_priority std_msgs/Bool"data: false"
此時如果joy_vel消息停止或者超時的話,twist_mux就會自動切換到nav_vel輸出,我們可以直接kiil掉joy_vel的話題發布,輸出監聽的終端就會顯示nav_vel消息的數據了:

2. 停止某優先級以下的輸入源
如果我們想要暫停輸出,怎么辦呢?鎖消息中也設置了暫停nav_vel的話題:
rostopicpub /pause_navigation std_msgs/Bool"data: true"
現在nav_vel話題就暫停了,想要恢復的話,只需要再發布一次pause_navigation消息即可:
rostopicpub /pause_navigation std_msgs/Bool"data: false"
需要注意的是,/pause_navigation話題設置的優先級和joy_priority是一樣的,所以這里的暫停無法暫停優先級100及以上的話題,所以并不會影響joy_vel消息的轉發。
我們還在鎖配置中設置了一個優先級為200的控制鎖,一旦我們生效這個鎖,優先級200以下的話題都會停止轉發:
rostopicpub /stop_closing_loop std_msgs/Bool"data: true"
現在所有話題都無法通過twist_mux輸出了。
OK,現在我們應該已經明白了twist_mux功能包的原理和使用方法,靈活使用鎖配置,可以讓我們輕松控制多個輸入源的切換。
-
RTOS
+關注
關注
22文章
817瀏覽量
119718 -
Mux
+關注
關注
0文章
38瀏覽量
23405 -
ROS
+關注
關注
1文章
278瀏覽量
17033
原文標題:ROS技術之—— twist_mux多路切換器
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
電腦鍵盤鎖功能及使用方法簡介
為ROS navigation功能包添加自定義的全局路徑規劃器(Global Path Planner)
zFTP軟件包的位置打開與使用方法介紹
基于RT-Thread操作系統env開發工具的使用方法
通過將小車接入MicroROS完成了一個遙控小車的開發
NVIDIA Isaac ROS GEM的功能特性
ROS Navigation Stack的整體設計思路和功能包
ROS部署PaddlePaddle的CV模型

ROS中如何設置消息信息
ROS的擴展有哪些方法
如何配置ROS驅動功能包

ROS2中自帶例程測試







 工商網監
工商網監
評論