 中星微人工智能算法之目標檢測算法分析
中星微人工智能算法之目標檢測算法分析
日前,中星微把實際安防項目經驗應用到PASCAL VOC數據集,并成功在一步法(one-stage)算法中取得了第一名的好成績。中星微人工智能芯片技術公司董事長兼總經理張韻東表示:“中星微首次將安防監控應用經驗與國際算法競賽數據集相結合,使得嵌入式前端設備也能達到與云端智能相媲美的效果,取得了可喜可賀的成績,但這只是一個的開始,相信未來會帶來更多更精彩的內容。”
目標檢測是機器視覺中一個最重要和最早研究領域之一,也是一切機器視覺任務基礎,因此在目標檢測算法方面,國際巨頭公司和科研機構紛紛進入這個領域,是兵家必爭之地,競爭非常激烈,也是目前在實際場景應用最成功的領域,包括安防監控、自動駕駛等多個領域。
日前,中星微把實際安防項目經驗應用到PASCAL VOC數據集,并成功在一步法(one-stage)算法中取得了第一名的好成績,獲得87.2% mAP精度,超越了大部分兩步法(two-stage)的算法,也證明了一步法(one-stage)可以做到精度和速度雙贏。
什么是目標檢測?
目標檢測就是判斷給一副圖像上是否存在感興趣的物體,如果存在,就給出所有感興趣物體的類別和位置(What and Where)。PASCAL VOC是由利茲大學、蘇黎世聯邦理工學院、愛丁堡大學、微軟、牛津大學等組織的一個視覺識別競賽,包含了物體分類、目標檢測、圖像分割等任務,對計算機視覺的發展具有深遠而巨大的影響。其中,目標檢測任務囊括了車、人、貓、狗等20類常見目標,訓練樣本較少、場景變化多端,非常具有挑戰性。
圖二

圖三
兩步法檢測法和一步法檢測法
目前主流的目標檢測算法主要是基于深度學習模型,其可以分成兩大類:
1)兩步法(two-stage)檢測算法,其將檢測問題劃分為兩個階段,首先產生候選區域(region proposals),然后對候選區域分類(一般還需要對位置精修),這類算法的典型代表是基于region proposal的R-CNN系算法,如R-CNN,Fast R-CNN,Faster R-CNN等;
2)一步法(one-stage)檢測算法,其不需要region proposal階段,直接產生物體的類別概率和位置坐標值,比較典型的算法如YOLO和SSD。目標檢測模型的主要性能指標是檢測準確度和速度,對于準確度,目標檢測要考慮物體的定位準確性,而不單單是分類準確度。
一般情況下,兩步法(two-stage)算法在準確度上有優勢,而一步法(one-stage)算法在速度上有優勢。但在工業界應用中,一定要考慮速度和精度的平衡,特別是前端智能應用中,受到計算資源的限制,一般都會選擇一步法(one-stage)的算法,基礎網絡盡量選擇輕量級的網絡,比如MobileNet等。
中星微2016年6月成功研發了神經網絡處理器NPU(Neural-network Processing Unit),此NPU集成到星光智能一號VC0758芯片中,成為中國首款嵌入式神經網絡處理器SOC芯片,針對前端智能的應用,中星微一直致力于研發可部署到端上的輕量級深度學習算法。
經過幾年的研發積累,把實際安防項目經驗應用到PASCAL VOC數據集,并成功在一步法(one-stage)算法中取得了第一名的好成績。中星微VIM_SSD網絡,基于SSD深度學習目標檢測算法的架構,融合多種機制和策略,并對網絡進行了大量的優化。基礎網絡采用VGG16,并未使用ResNet-101, ResNet-152等更復雜的網絡,保證精度的情況下速度更快;同時整個網絡為全卷積網絡,可以自如調節檢測目標的分辨率和使用場景,更容易在實際系統中部署。
下表是目前PASCAL VOC競賽前十名,可以看出,下面算法中大部分應用了更復雜的基礎網絡ResNet-101和ResNet-152,并使用了兩步法。

圖四
制約前端智能發展的限制條件
中星微人工智能芯片技術公司研發副總艾國表示:“最近幾年,隨著深度學習方法的復興和快速發展,算法方面取得了巨大的進展和突破,但前端智能的發展較為落后,其主要原因受限于前端的計算資源,因此搭載輕量級深度神經網絡是前端智能發展必由之路,中星微一直致力于研發能夠和NPU緊密結合的輕量級深度神經網絡,和可快速編譯、移植和部署的嵌入式智能應用方案。”
機制和策略
VIM_SSD采用了如下主要的機制和策略:1)使用FPN,融合多層特征。2)使用inception結構,提供多種感受野。3)使用SE結構,增強有用特征,抑制無用特征。4)加入基于框的語義監督,增強提取到特征的語義信息。
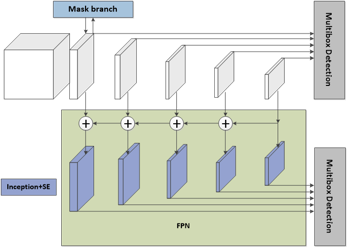
圖五
FPN是指將深層特征經過放大,融合到低層特征中,以增強低層特征的語義信息。我們在這個基礎上,將融合后的特征做了一些處理,以使其適應檢測任務。我們觀察到網絡的anchor box并不全是1:1的,還可以有1:2,1:3,2:1,3:1,但是已有網絡的卷積核都是MxM。我們引入inception+SE結構,一方面在其中加入1x3,3x1的卷積核,使其能夠更好地提取非正方形的特征,另一方面引入SE模塊,讓網絡為每種長寬比的目標自動選擇相應的特征。
語義分割方面,在很多文章中已經有證明,它對目標檢測是有促進作用的。但是由于數據標注難度大,在實際項目部署過程中比較困難,所以我們采用基于框的語義信息,對網絡語義特征提取進行監督。
VIM_SSD作者之一楊敏表示:“我們從2016年開始研究輕量級深度神經網絡,并在多個實際項目中使用和部署,這次主要是想把項目積累的經驗和方法在公開數據集上做一次嘗試,也是對過去工作一次階段性總結。”
中星微人工智能芯片技術公司董事長兼總經理張韻東表示:“中星微首次將安防監控應用經驗與國際算法競賽數據集相結合,使得嵌入式前端設備也能達到與云端智能相媲美的效果,取得了可喜可賀的成績,但這只是一個的開始,相信未來會帶來更多更精彩的內容。”
-
算法
+關注
關注
23文章
4612瀏覽量
92894 -
中星微
+關注
關注
0文章
28瀏覽量
11238 -
人工智能
+關注
關注
1791文章
47279瀏覽量
238497 -
目標檢測
+關注
關注
0文章
209瀏覽量
15611
原文標題:中星微奪冠國際人工智能算法競賽,目標檢測一步法精度速度雙贏
文章出處:【微信號:AI_era,微信公眾號:新智元】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦






 工商網監
工商網監
評論