 汽車產業現況及自動駕駛的挑戰
汽車產業現況及自動駕駛的挑戰
汽車業正來到一個轉折點,即將從先進駕駛輔助進入到真正的自動駕駛車階段。要提升自動能力,直到不久前的做法仍然都是透過分散但聯機的電子控制單元(ECU)來新增額外的功能,但這在未來似乎不是可行的解決方案,因此,采用截然不同的思維方式確實是必要的。
我們將在本文中探討自動駕駛領域的挑戰,包括可靠度方面的關鍵要素,接著也將討論有關開放式平臺系統策略的概念,以及此概念如何實現符合SAE第3至5級汽車標準的聯機、服務、安全與防護。
汽車產業現況
全世界現在都在努力朝完全自動駕駛的方向前進,盡管在時間進程上仍有不少爭論,但普遍共識已經達成,實現目標只是遲早的問題。美國汽車工程師協會(SAE)早已提出未來藍圖,為道路車輛自動化訂出六個等級,每個階段都為汽車自動操作駕駛賦予更多任務。
有人把這個進程比擬成爬圣母峰(Mount Everest),因為它需要完成多次技術演進,才能走完SAE定義的六個階段。其中幾個必須考慮的要素包括:感測技術與人工智能(AI)將如何演進,才能取代手握駕駛盤的駕駛人,以及如何在汽車聯機率日益提高的狀況下提供足夠的安全性。除此之外,客戶期望與安全考慮是每個階段都需要克服的重大難關。
部份汽車制造商采取“汽車為先,運算其次”(vehicle first, computing second)策略,但其他剛投入這個市場的廠商,包括各大計算機公司,則有不同的看法。自動駕駛(AD)主要的挑戰來自軟件,因此廠商現在正在推行一種策略,也就是先開發運算系統,接著再依系統打造車輛,徹底顛覆傳統思維。
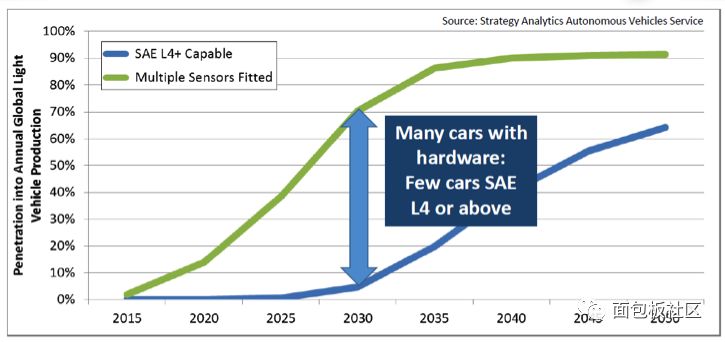
盡管多數汽車均搭載硬件,但只有少數具備SAE L4或以上的功能(來源:Strategy Analytics)
自動駕駛的挑戰
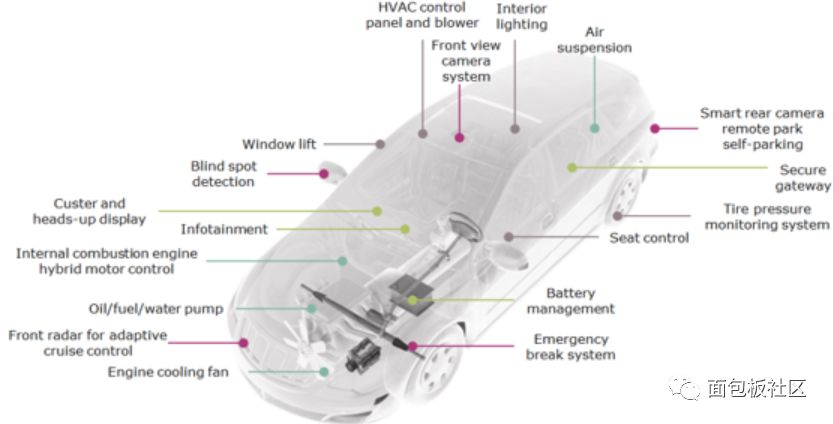
今日的現代化汽車已是由大量子系統或ECU組成的復雜系統,分別由數百或數千個電子與電機組件構成。根據估計,每一輛高階車輛內平均有超過100個微控制器(MCU)/微處理器,用來作為這些ECU的“中樞”。在這些系統中運作的軟件數量甚至比最新的尖端F-35戰斗機還要多。
事實上,為了達到第3級(Level 3)自動駕駛車的自動化等級,所需的運算效能也必須比目前的汽車高出許多。除此之外,市場的期待是,自動駕駛車必須先具備高可靠度,讓消費者感到安心自在,之后才能完全將駕駛工作托付給計算機。換句話說,自動駕駛車需要具備容錯操作能力,要能辨識錯誤并加以解決,讓旅程得以繼續,就算功能會受到限制也一樣。

可靠度五大方面必須一次滿足
為了實現容錯操作的系統,汽車制造商必須從汽車的整體架構著手,確保將備援機制等安全措施部署在以下三個功能區塊:感測、運算、致動。還有,這些區塊之間以及與其他汽車、基礎設施或云端等車外世界之間的所有互動(亦即聯機)必須及時且可靠。聯機是自動駕駛的關鍵,能實現重要的加值服務,包括遠程診斷、軟件更新、交通信息、過路費控管及付款等多種服務。但是,這些功能也導致汽車暴露于更大的攻擊面,因此,車內必須執行更多的安全功能。
連網車輛暴露出更大的攻擊面,容易遭受外部世界攻擊
為了解決這個安全難題,我們需要采用多層式策略。在應用層執行SSL、TLS等安全通訊,加上應用訪問控制,并確保流動數據的可信度,這對無線軟件(OTA)更新或服務等功能來說尤其重要。其次,軟件平臺的安全性需要包含分隔化、入侵預防和ECU驗證。最后在硬件層方面,CPU安全性、針對整合硬件安全模塊(HSM)的支持以及ECU自身的防火墻,這些都有助于為汽車建立高效率的安全平臺。
開放式平臺策略
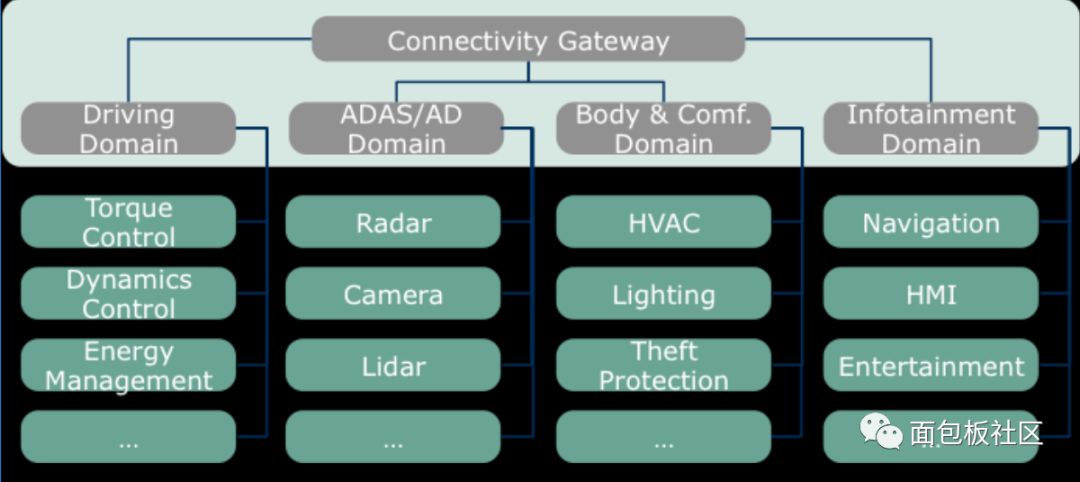
產業目前正快速朝向網域型的分布式計算架構前進,此架構以汽車最重要的功能為主,包括駕駛、先進駕駛輔助系統(ADAS)/自動駕駛(AD)、車身與舒適度以及信息娛樂。此架構將為快速演化且日益復雜的未來自動駕駛車帶來更加簡化的策略。
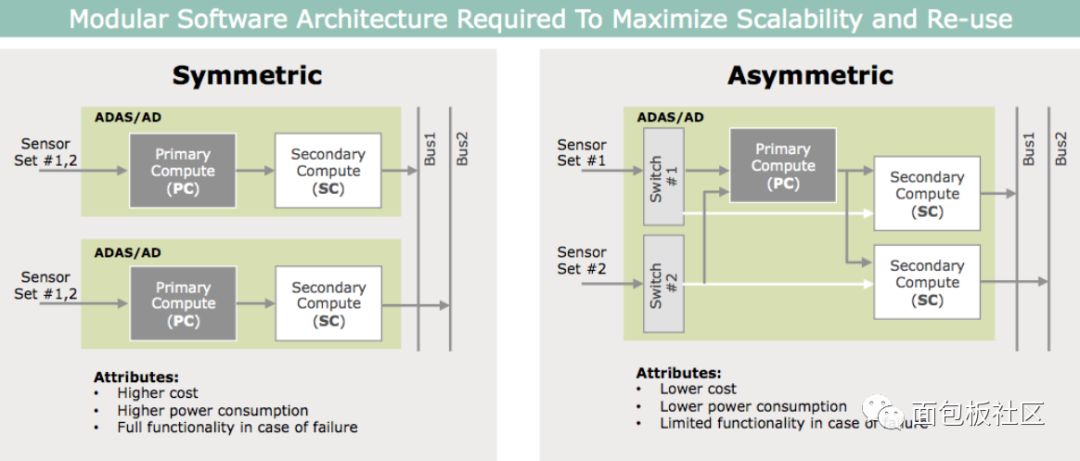
不對稱的策略能節省功耗與成本,但功能性也較低

典型的自動駕駛控制架構
網域型分布式計算是未來的關鍵
SAE第4級(Level 4)以上的自動化需要從汽車的感測、運算和致動等功能區塊大幅強化處理能力,子系統的數量和復雜度將呈指數級增加,目標是達到這些自動車需要的功能性與可靠度等級。相較于以目前E/E架構為基礎的“分布式控制”(Distributed Control),這些需求更偏向“分布式計算”(Distributed Computing)的概念。在現有的E/E架構內加入其他的傳感器模塊,從硬件的觀點來看或許簡單,但對軟件整合來說則是一大挑戰,特別是缺少抽象層時,會導致平臺更不容易實作。
在過去這一兩年里,許多汽車制造商和系統供應商不斷擴大功能,就是為了克服這些挑戰。有些廠商與技術或服務供應商成為合作伙伴;有些則并購整間公司,將必要的技術和專業知識引進到內部,特別是軟件方面的知識。這清楚代表著業界正視對于新技術和方法的需求,也因而帶來了擴大合作的機會。從目前這個轉折點來看,采用開放式平臺/開放式系統策略有助于加快整個流程,加速實現創新,促進開發可互通、模塊化且可擴充的自動駕駛系統。
顯然,未來的模塊化且可擴充軟件始終會建立于異質網絡架構之上,此架構包括了所有的低階驅動程序、操作系統、中間件和應用架構等。為了實現擴充能力,在汽車基礎架構中,這個領域未來將會高度標準化,而建立在此堆棧上的應用將成為各家汽車制造商突顯自家優勢的兵家必爭之地。
標準化與API帶來的其中一項有趣的結果,就是讓新的商機和商業模式開始萌芽。隨著汽車連網程度提高,新創公司和現有公司都有機會為駕駛提供標準化的新型服務和加值服務,確保跨產業之間能兼容與互通。
結語
雖然距離自動駕駛車完全實現還有一段路要走,但目標顯然在不遠的將來就會實現。要管理這些復雜系統的整合,同時達到汽車業史上最高的可靠度,是目前最需要解決的挑戰,但更重要的是,在真正的自動駕駛實現以前,業界需要先開發出標準化且可擴充的架構,并了解前方多數的挑戰都可運用創新的軟件開發加以克服。
-
汽車制造
+關注
關注
0文章
241瀏覽量
16073 -
自動駕駛
+關注
關注
784文章
13877瀏覽量
166660
原文標題:自動駕駛車的最大挑戰在于軟件革命
文章出處:【微信號:gh_bee81f890fc1,微信公眾號:面包板社區】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
從《自動駕駛地圖數據規范》聊高精地圖在自動駕駛中的重要性

一文聊聊自動駕駛測試技術的挑戰與創新

Perforce SAST專家詳解:自動駕駛汽車的安全與技術挑戰,Klocwork、Helix QAC等靜態代碼分析成必備合規性工具







 工商網監
工商網監
評論