 圖靈測試的現實意義,圖靈測試本質上是替代測試
圖靈測試的現實意義,圖靈測試本質上是替代測試
一個人工智能深度學習的問題,科學家、統一物理學家、神經生物科學家從不同的角度想把深度學習盡可能說清楚,盡可能學術化。對于搞機器專業的人來說,從來都是算法、程序、數據。怎么樣通過大量的數據,略微的修改,呈現我們的產品,對我們來說是一個顛覆性的問題。
5月19日,在2018全球人工智能技術大會上,CAAI中國人工智能學會理事長、中國工程院院士李德毅發表了題為“路測的學問--無人駕駛的后圖靈測試”的演講,暢談了無人駕駛的發展前景。
以下為李德毅院士在本次大會中的演講實錄,經本人同意整理后發布。
李德毅:剛才聽了姚先生的報告很有感觸,一個人工智能深度學習的問題,科學家、統一物理學家、神經生物科學家從不同的角度想把深度學習盡可能說清楚,盡可能學術化。對于搞機器專業的人來說,從來都是算法、程序、數據。怎么樣通過大量的數據,略微的修改,呈現我們的產品,對我們來說是一個顛覆性的問題,所以我覺得很有啟發。
今天跟大家討論另外一個技術性的問題:圖靈測試。無人駕駛的車子,大的小的都在路上跑,可能你旁邊的車不經意就是無人駕駛,所以講一講路測的學問。也就是無人駕駛在后圖靈時代的測試是怎么樣的。
最近Google發明了機器人打電話,將來你接到的電話你可能搞不清楚是人打的還是機器人打的,這個事情有點麻煩,尤其他它的語音和你原來朋友的語音是一模一樣的,怎么辦?現在國內外火爆的無人駕駛測試活動,各地區都在建設封閉或半封閉的測試場。這樣一來,就要把后圖靈時代的圖靈測試推向前所未有的高潮期。沉浸了多年的圖靈測試不是科學家在做,是全民在做。我想,這可能是阿蘭?圖靈自己也沒有想到的。
一、圖靈測試的現實意義
最近有一家公司的共享汽車發生了事故,全民關心。涉及到什么問題?出租車行業的職業道德、職業底線、職業操守的問題。最近又聯系到無人駕駛車在全世界死人的問題,大家也很擔心。交通部門發出很多的規定,特別是有的地方法規要求,無人駕駛車必須先在封閉環境里安全行駛五千公里才可以上路測試,如果你家里有一個車,跑五千里不算數就耗費掉了,還是挺心疼的。
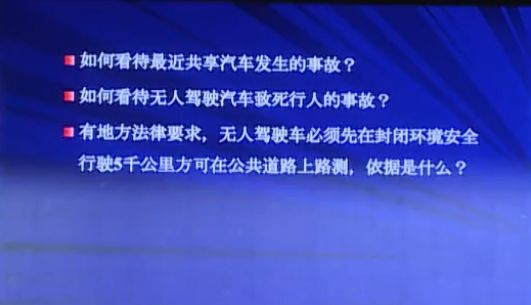
去年和今年Google發布了他們的自動駕駛路測報告,已經到了一千英里,到明年的時候,機器人一直在問人類,你們為什么還不給我們發駕照?如果發駕照發什么?中國的駕照有A類、B類、C類,開小車的是C照,開大車開的好的可以拿到A照,也不容易。無人駕駛車發什么照?將來是不是發AP照、BP照、CP照?
無人車上路要發駕照已經成為各國交管部門當務之急,已經成為社會的普遍關注。如果圖靈還在世,他會怎么做?
1950年,他寫了一篇論文登在雜志上,題目是“計算可以思維嗎?”我們說是計算的機理和智能,如果測試人看不到人和機器,在密閉的環境里,如果不能區分人和機器,大概就是智能的。2014年,一個聊天機器人尤金?古斯特曼投入了測試。
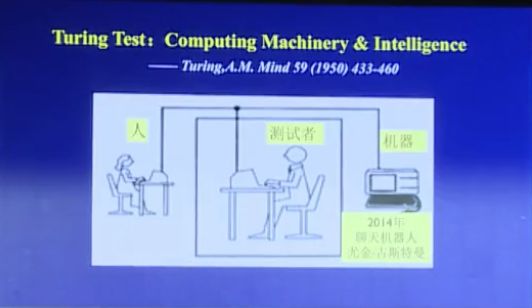
圖靈的這篇文章到底是“機器可以思維嗎?”還是“機器能夠替代人嗎?”這是兩個命題。什么叫思維?替代好像好辦一點。從圖靈描述的圖來看,好像是Tester,如果把人和機器分別換上特斯拉的Autopilot和一個真人Human Driver,調換一下,直升機在天上看,你可以看出區別嗎?看不出來就說無人駕駛通過了圖靈測試,可以嗎?所以人類進入了后圖靈測試時代。
當客服機器人和我們聊天時,他在聽你也在聽,他在說你也在說,甚至可以同時問問題、翻譯、語音。機器人醫生給我們進行遠程醫療時,當陪讀機器人為孩子做咨詢或輔導時,當機器同傳能夠使得我們和外國朋友直接交談時,當機器人寫作的詩集出版了,著作權人是?法官和法官機器人,誰判決準確率更高?所以機器人已經走入千家萬戶。
我們人類是拿駕照的,在座會開車的同志們都知道,當你剛拿到駕照時,你跑了五千公里嗎?五百都沒有,五十公里差不多。你當了1-2年的菜鳥,后來跑了幾萬公里時你才是老司機。為什么對機器人那么苛刻?
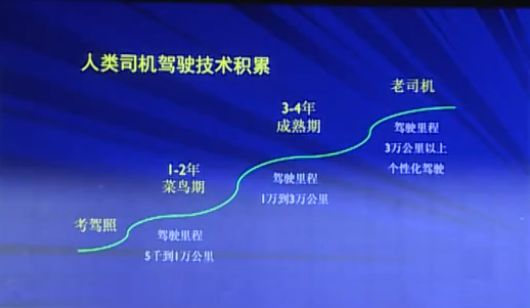
人類社會常年考駕照,測試標準和測試環境已經能夠清楚界定,加以駕駛行為大數據可以精準收集,評測結果較為客觀。國內的這些人拿駕照,考官都不在現場,都在房子里看你有沒有碰到桿子。已經積累了豐富的測試經驗。
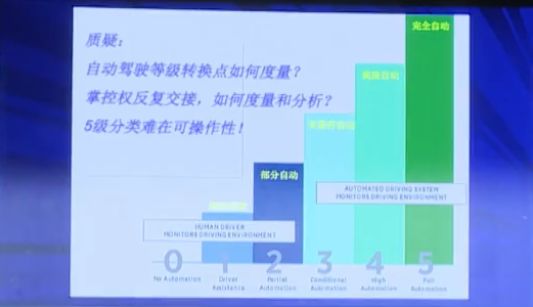
在這樣的情況下,3016標準給了我們一個檔案,把智能駕駛分六個等級,到L4的時候,就可以不要眼睛和注意力了,到L5時就不要駕駛員了。
自動駕駛的等級轉換點如何度量?有的企業說我是3.5,有的說是2.5,怎么度量?當汽車把接管權交給人時,反復說怎么樣度量。尤其是第五級,什么叫完全自動?很惡劣的天氣,人都不能開,還能完全自動嗎?
所以,將來人類怎么樣給無人駕駛發駕照?
第一步:在車里配一個安全駕駛員,讓無人車自己開,但安全駕駛員有駕照,隨時干預。這是目前的狀況。
第二步:不要駕照的安全員在車里,可以干預車,但這個安全員本身可以沒有駕照。
第三步:共享汽車時乘員不必有駕照,但仍然可以人工指揮,因為我們知道,機器人和人在一起時一定要聽人指揮。
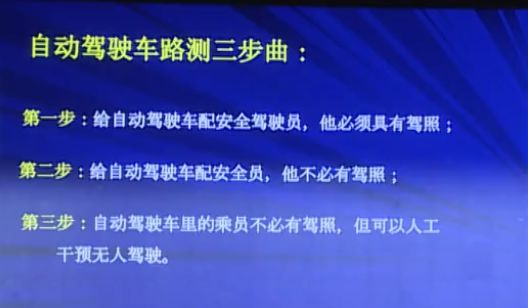
按照這個“三步曲”,看圖靈測試是多么重要,因為各行各業都需要人,這個機器人應該持照上崗,這個“照”誰來發?
二、圖靈測試本質上是替代測試
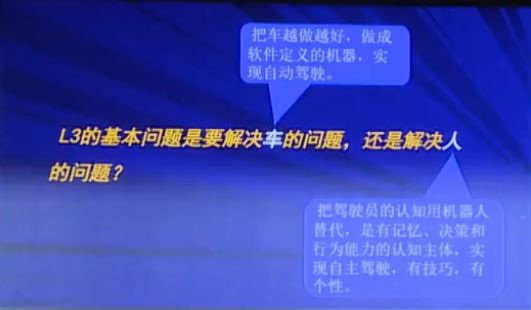
圖靈測試本質上不是智能測試,是替代測試,是機器人能不能替代人的工作。無人駕駛難在擬人,我們有馬車的時候,覺得馬車不夠快換了汽車。雖然汽車開的快,但有的時候不如馬,因為老馬識途,汽車沒有地圖怎么回去?當我們討論L2是輔助駕駛,L3是自動駕駛時,L3的基本問題到底是放在車上還是人上?如果放在車上,就要讓車企的同志們把車越做越好。我最近訪問了一個博士,他是做底層設計的,要在中國做線控的自動改造,我們把車子越做越好,像特斯拉一樣,做一個軟件定義的機器人,要自動駕駛,這是一條龍。我做無人駕駛時,也希望一個好的線控的高精度的自動駕駛的汽車,但我把重點放在解決人的問題上,把駕駛員的認知用機器人替代,是記憶、決策和行為能力的認知主體。長期以來,我們有一個詞不停說,那就是Agency。有的中文都不翻譯Agency,其實本意就叫代理。實際上我們現在做的就是做一個駕駛員的智能代理,實現智能駕駛,希望這個代理有駕駛的技巧,還有駕駛的個性。
汽車的行為由駕駛員決定,無人駕駛難在擬人,要研究駕駛員的行為學和心理學,物化駕駛員的感知、決策、記憶、控制和行為技巧,而不是一味地改進車輛動力學性能,實現自動駕駛!最近我們的團隊在天津港用卡車做了一個精準定位,以前我們做一個精準定位,無論是空的還是滿載,大概誤差在20厘米。港口的裝機場要求準確落在無人駕駛卡車上,提出5厘米的定位要求。其實集裝箱的大卡車很難到5厘米。所以做好無人駕駛,既要有好的車,更要有好的駕駛員的智能代理。
我們曾經在常熟自然科學基金委組織了多次比賽,提出“4S”評測標準,開車要Smooth、安全Smart、Safety、Speed。從這個角度上來說,我們已經做了大量的工作。
各省都在建測試場,什么時候我們身邊來一個無人駕駛車,開車的人不再驚訝,可以跟他很輕松、友好的進行交互。
三、圖靈測試本質上是交互智能測試
圖靈先生提出用對話的方式考慮一個機器的語言智能。把機器人的記憶智能和計算智能藏了起來,當前的聊天機器人把對話交互方式推向了高潮。
在開車過程當中,駕駛員與環境和周邊車輛有沒有交互?我認為是有的,必須不時的與環境和周邊車輛進行交互,駕駛員的經驗和臨場處置能力必須能夠體現。我們為此在交互認識之上做了很多的工作,首先研究了無人駕駛基于語言的交互。無人駕駛車面對復雜、不確定的周圍環境,可以通過智能音箱、手機和互聯網的方式,進行語音、語義等自然語言的理解,與車主、乘員、運行維護人員、遠程約車請求等進行不同人群之間的交互。

無人駕駛要能夠響應遠程車主的干預,因為車主是這個車子的主人,還要能夠響應約車的請求。運維人員可以遠程在線干預無人駕駛車,研發人員可以利用特定的接口,與無人駕駛進行交互,監控車輛實時狀態,完成調試工作。無人駕駛車還要能夠識別周邊人群的肢體語言,例如現場執勤的交警,你必須服從它。行人要坐你的車,可能看你比較遠,用手勢來表達,你也必須能理解。
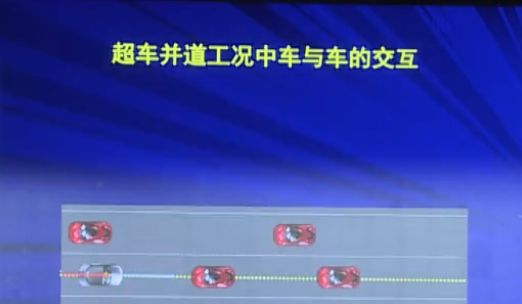
超車并道在無人駕駛中是一個難點,尤其當低速車道匯入高速車道比較難。我們做了一個例子,例如有四個紅車是有人駕駛,一個灰色的車輛是無人駕駛,怎么換道?一定不時跟你周邊幾個車輛用打燈、按喇叭或者踩油門、剎車的方式告訴周邊的人,如果他跟你協作,你超車并道了。
無人駕駛車輛的交互,我們已經在宇通公交客車和天津港的集卡上做了初步實現,在剛剛召開的天津2018世界智能大會上獲得交互組的領軍獎。現在都不講冠軍、亞軍或季軍,冠軍叫領軍獎,亞軍叫領先獎,季軍叫優秀獎。
四、圖靈測試本質上是不確定性智能測試
圖靈測試有沒有漏洞?幾十年來,大家為圖靈測試開了多少次會?我發現一個漏洞,因為圖靈測試要求測試人是主體,如果被測試的一方支支吾吾、保持沉默或者主動插話介入,就可能搶過了話語權,顛覆了測試者的主導定位。就像青年人去面試,本來老板考他,他很厲害,考了老板。就很難區分對方到底是人還是機器人,再一次暴露出圖靈測試的瑕疵。
圖靈測試對話過程中充滿了不確定性,例如聊天本來是淺層次、短時長的對話,也是最通用的對話,有的就是為了消磨時間、客氣、禮貌,充滿了不確定性,總是在講一些所謂的廢話,其實廢話不廢,它帶來了親和感,在社交生活中不可或缺,不會聊天的對話機器人,人們會覺得它太乏味。所以不要完全從負面看。
不確定性智能測試表現在:對話的語境和語用、情感的交互、交互環境的不確定性。我們必須研究不確定性智能的客觀性、普遍性和積極意義,尋找不確定性中的基本確定。
駕駛員曾經開過這樣的車,想換道,結果后面的車子不讓你,你開了一半又回來了。這種情況還是經常有的。總共有五種情況,首先常見的就是生成超車并道,成功了。也有超車過程中,中途放棄換道,回到原車道。也有強性換道,不換也得換,等等。
無人泊車過程中有很多的不確定性,尤其是非常規的泊車,我們叫邊緣泊車。大家都說無人駕駛難在最后一公里,因為它把人放下之后,往哪里去?很多的選擇,加油站、停車場?我個人認為,應該把最后一公里當做最先一公里來解決,否則老百姓不接受。
人工智能的使命就是加速汽車向可交互的輪式機器人的轉變。
目前全國各地火爆的智能駕駛專用實驗場和評估環境,很可能發展成為人與輪式機器人比賽駕駛智能的實驗場,發展成為賽車手和賽車機器人角逐冠軍的比賽場,發展成為后圖靈時代的圖靈測試場。
我們一般看車就是看底盤大架、發動機,底盤就是看它的手和腳,實際上是駕駛人力量的延伸。發動機就相當于心臟。而我們加了傳感器、指紋,等于加了一個智能代理。因此有可能使得汽車成為我們駕駛員自己,這應該是人工智能時代最有意義的科學課題,再一次彰顯了圖靈測試的意義。
機器人全人帶來了一個新的行業,就是后圖靈時代的圖靈測試應該考慮人機共生、共融、共發展的測試方法學和測試標準的時候了。
-
無人駕駛
+關注
關注
98文章
4059瀏覽量
120509 -
深度學習
+關注
關注
73文章
5503瀏覽量
121162 -
圖靈測試
+關注
關注
1文章
9瀏覽量
7345
原文標題:李德毅院士:路測的學問--無人駕駛的后圖靈測試
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
什么是回歸測試_回歸測試的測試策略
WIFI信令測試詳解,附天線測試

小鵬汽車圖靈芯片及L4自動駕駛新進展
小鵬汽車2024 AI科技日:圖靈AI芯片進展公布,預計AI汽車市場將迎來巨變
圖靈測試的內容是什么_圖靈測試的作用
圖靈測試什么意思_圖靈測試是干嘛的
小鵬自研圖靈芯片震撼登場:流片成功性能超越行業旗艦
PEM羅式線圈在高壓絕緣放電測試瞬態變化上的應用
國芯科技與圖靈量子簽署戰略合作協議
國芯科技與圖靈量子達成戰略合作,共研量子技術新篇章
接口測試是測試什么內容
接口測試屬于功能測試嗎為什么
仿真測試與實車測試的區別
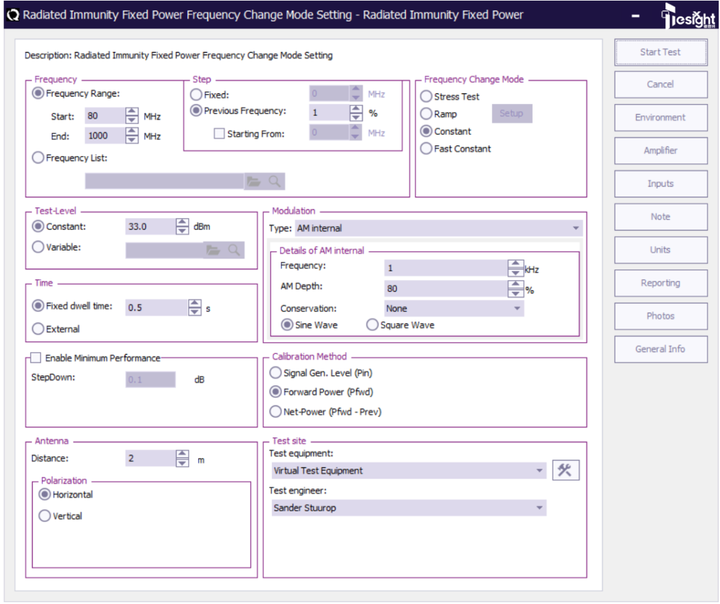
如何使用EMC測試軟件執行輻射抗擾度測試?(二)測試、校準方法及調制
如何使用EMC測試軟件執行輻射抗擾度測試?(一)測試方法





 工商網監
工商網監
評論