") 英偉達發(fā)表AI新研究:機器人即完美復制人類演示
英偉達發(fā)表AI新研究:機器人即完美復制人類演示
導讀: 英偉達在澳大利亞布里斯班舉行的機器人與自動化國際會議(ICRA)上發(fā)表了一項新的研究工作,其中包括訓練機器人從人類執(zhí)行任務中學習。
英偉達在澳大利亞布里斯班舉行的機器人與自動化國際會議(ICRA)上發(fā)表了一項新的研究工作,其中包括訓練機器人從人類執(zhí)行任務中學習。
截止到目前,機器人都是被訓練在一個與程序員隔離的環(huán)境中,執(zhí)行固定次數的指令。在演示中,英偉達使用了一些不同顏色的固體方塊,并按照固定模式堆疊它們,從而訓練機器人復制執(zhí)行這一任務。
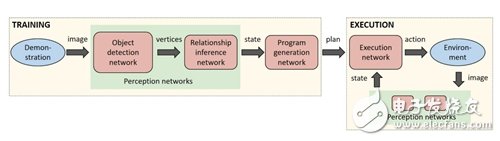
在演示中,被訓練的神經網絡序列成功地推斷出了方塊之間的關系,并開發(fā)了一個模擬所執(zhí)行任務的自動化程序。
英偉達發(fā)布的視頻顯示,該系統(tǒng)使用英偉達Titan X GPU模擬了人類進行的單一演示。由于程序引用了事件的當前狀態(tài),因此,它成功地糾正了在實時執(zhí)行任務時犯下的錯誤。
“攝像機獲取場景的實況視頻,并通過一對神經網絡實時推斷場景中物體的位置和關系。由此產生的感知被送到另一個網絡,產生一個計劃來解釋如何重建這些感知,”英偉達的博客中寫道。
該研究旨在降低重新編程機器人執(zhí)行一組任務所涉及的成本。該研究的首席科學家Stan Birchfield說:“我們感興趣的是,讓非專家用戶通過簡單地告訴機器人做什么,來教會機器人執(zhí)行新任務。”
通過這項研究,英偉達加入了包括谷歌和SRI在內的公司聯(lián)盟,這些公司正在AI領域取得巨大的進展,并開發(fā)出智能且具有“常識”的AI系統(tǒng)。
聲明:本文內容及配圖由入駐作者撰寫或者入駐合作網站授權轉載。文章觀點僅代表作者本人,不代表電子發(fā)燒友網立場。文章及其配圖僅供工程師學習之用,如有內容侵權或者其他違規(guī)問題,請聯(lián)系本站處理。
舉報投訴
-
機器人
+關注
關注
211文章
28490瀏覽量
207448 -
AI
+關注
關注
87文章
31077瀏覽量
269411 -
英偉達
+關注
關注
22文章
3788瀏覽量
91284
發(fā)布評論請先 登錄
相關推薦
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示
鴻蒙機器人與鴻蒙開發(fā)板聯(lián)動演示,機器人的角色為迎賓機器人,開發(fā)板負責人賓客出現監(jiān)聽
發(fā)表于 12-02 14:55
英偉達計劃推出驅動人形機器人新技術
英偉達(Nvidia)近日宣布,其用于驅動人形機器人的新技術將于2025年上半年正式上市。這一舉措旨在搶占快速增長的機器人市場,并確立英偉
【書籍評測活動NO.51】具身智能機器人系統(tǒng) | 了解AI的下一個浪潮!
早就聽大佬們說,具身智能是人工智能的下一波浪潮,也是AI未來的趨勢!
最近,具身智能的概念更是炙手可熱,備受矚目!
不論是這幾天稚暉君開源人形機器人全套圖紙+代碼,引發(fā)圈內熱議。
還是各類具身智能
發(fā)表于 11-11 10:20
英偉達預測機器人領域或迎“GPT-3時刻”
英偉達,作為全球圖形處理器與人工智能領域的佼佼者,正引領著科技界對機器人未來的無限遐想。近日,英偉達高級科學家Jim Fan在科技媒體The
英偉達打造人形機器人訓練平臺,引領AI新紀元
英偉達近日宣布了一項重大舉措,為全球機器人制造業(yè)與AI領域注入強勁動力。公司推出了專為人形機器人設計的訓練平臺,旨在為行業(yè)領先的制造商、
阿爾特攜手英偉達,將Omniverse融入機器人研發(fā)
近日,阿爾特公司在其機構調研活動中透露,公司正攜手英偉達技術團隊,將Omniverse平臺深度融入機器人研發(fā)領域,旨在打通英偉達全面的
英偉達黃仁勛:堅守法規(guī)服務中國,展望人形機器人未來
在科技飛速發(fā)展的今天,英偉達作為圖形處理器(GPU)領域的佼佼者,其一舉一動都牽動著全球科技界的目光。近日,英偉達CEO黃仁勛在接受專訪時,就美國對中國大陸的芯片出口禁令、人形
英偉達CEO黃仁勛展望AI與機器人新時代
在COMPUTEX 2024大會上,英偉達CEO黃仁勛發(fā)表了激動人心的演講,他看好機器人即將跨入擁有更強感知能力和系統(tǒng)的全新時代。黃仁勛強調了自家人工智能(
英偉達首席執(zhí)行官黃仁勛:AI模型推動英偉達AI芯片需求
近來,以ChatGPT為代表的AI聊天機器人已經導致英偉達AI芯片供應緊張。然而,隨著能夠創(chuàng)造視頻并進行近似
英偉達發(fā)布人形機器人基礎模型
英偉達在一年一度的GTC開發(fā)者大會上,由創(chuàng)始人黃仁勛親自揭曉了令人矚目的Project GR00T人形機器人項目,其中引人注目的是一款全新的人形機器
英偉達GTC大會丨宇樹通用人形機器人H1與全球共同擁抱AI
2024年3月19日,英偉達CEO黃仁勛在美國加州圣何塞SAP中心發(fā)表主題演講《見證AI的變革時刻》,正式拉開了2024年英偉
人形機器人火熱 OpenAI入局人形機器人 英偉達等巨頭入局機器人行業(yè)
人形機器人火熱 OpenAI入局人形機器人 英偉達等巨頭入局機器人行業(yè) 人形機器人在
人形機器人爆發(fā)前夜?英偉達和OpenAI等巨頭紛紛押注
新近消息顯示,一家開發(fā)類人機器人的初創(chuàng)公司新近融資云集包括英偉達和OpenAI在內的硅谷大廠和風投基金,顯示類人機器人正在成為科技巨頭押注人工智能(
英偉達推出全新AI聊天機器人
近日,英偉達(Nvidia)宣布推出其全新的AI聊天機器人——“Chat With RTX”。這款聊天機器人被視為
英偉達向聊天機器人初創(chuàng)公司Kore.ai注資1.5億美元
據報道,英偉達向聊天機器人制造商Kore.ai注資1.5億美元。這一投資是英偉達在人工智能領域的





 工商網監(jiān)
工商網監(jiān)
評論