 樹莓派驅動舵機介紹_樹莓派驅動舵機代碼
樹莓派驅動舵機介紹_樹莓派驅動舵機代碼
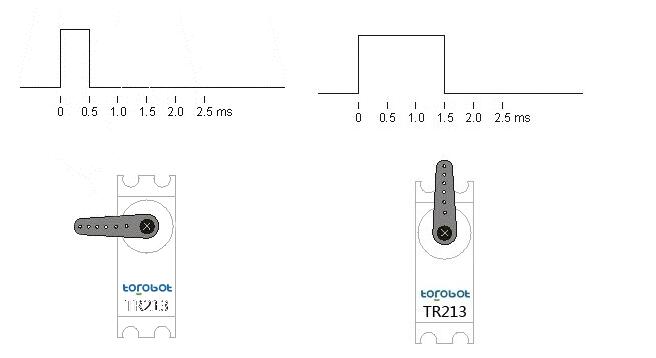
舵機的控制一般需要一個20ms的時基脈沖,該脈沖的高電平部分一般為0.5ms~2.5ms范圍內的角度控制脈沖部分。以180度角度舵機為例,那么對應的控制關系是這樣的:
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
請看下形象描述吧:
舵機的工作電壓和電流
每一款舵機都有自己的參數,如TR213舵機的工作電壓是4.8-7.2V,TR205舵機的工作電壓是4.8-6V,電壓不能超過這個范圍,否則會很容易燒壞舵機,在不清楚舵機工作電壓范圍的情況下,建議使用5V給舵機供電。
舵機的工作電流是根據舵機的實際情況而定的,如TR213舵機,在空載的時候電流幾乎為0,而在正常負載的情況下,電流在0.5A左右,視實際情況而定。六足機器人需要18個TR213金屬舵機,需要提高的電流大概在8A左右,如果電源功率不夠會影響舵機的性能,最常見的現象是,當一個舵機負載的時候,其他舵機會出現混亂,無規律的亂擺。
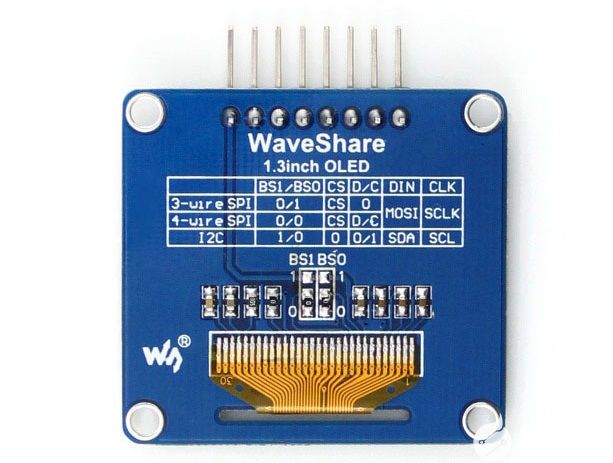
舵機的接線如下圖
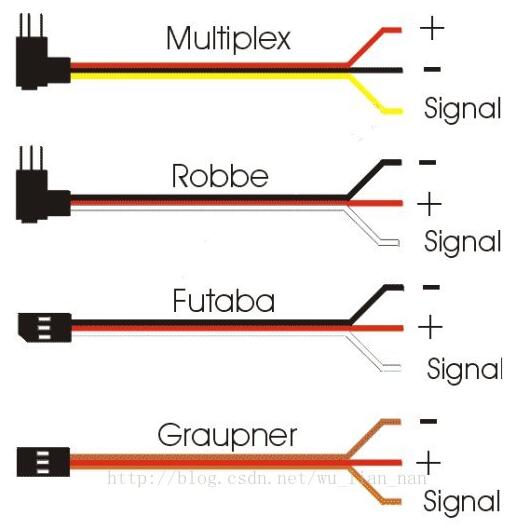
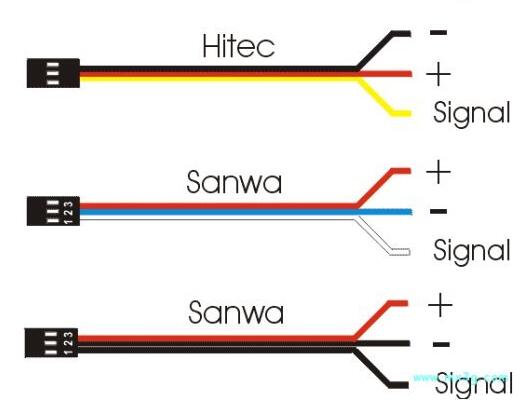
市場上90%的舵機中間那根線都是正級。
基礎知識介紹的差不多了,具體可以去百度看看舵機手冊。
下面我們來說說在樹莓派中,如何用wiringPi庫去驅動舵機隨心所欲的轉。為什么要用wiringPi庫呢,因為博主不怎么喜歡寫Python,博主喜歡寫c/c++代碼。廢話不多說,開始。
第一:首先,我已經知道了舵機的pwm周期為20ms,然后是這樣的
0.5ms--------------0度;
1.0ms------------45度;
1.5ms------------90度;
2.0ms-----------135度;
2.5ms-----------180度;
也就是說給它1.5ms的高電平,19.5ms的低電平轉向0度位置。這里需要注意,是0度位置,不是舵機轉0度,當然如果舵機怎么正好處于0度位置,當然也不轉。這里可能就有人要問了,那啥位置算是0度位置呢?根據我對舵機的理解(180度的舵機),就是你向一個方向用手轉動舵機,到一個你無法轉動的地方,這個位置不是0度位置,就是180度位置。然后你用下面的代碼運行一下就知道了。
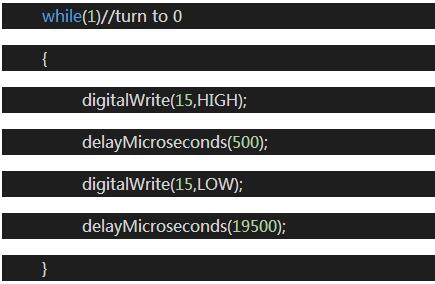
我這里就這樣來模仿pwm的。這個代碼一運行,舵機就自動到了0度位置。
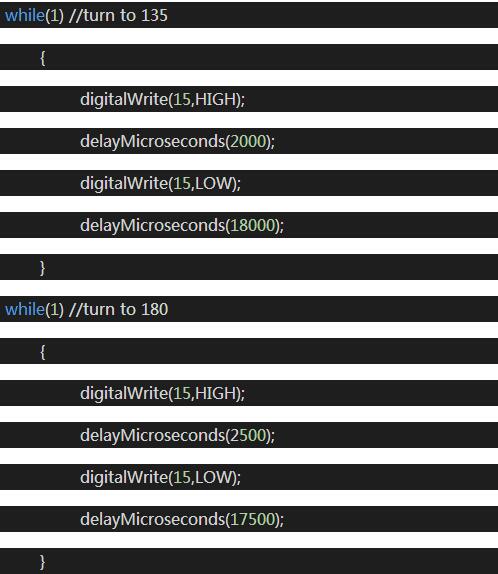
同理,想轉到45度位置,90度位置,135度位置,180度位置的代碼如下:
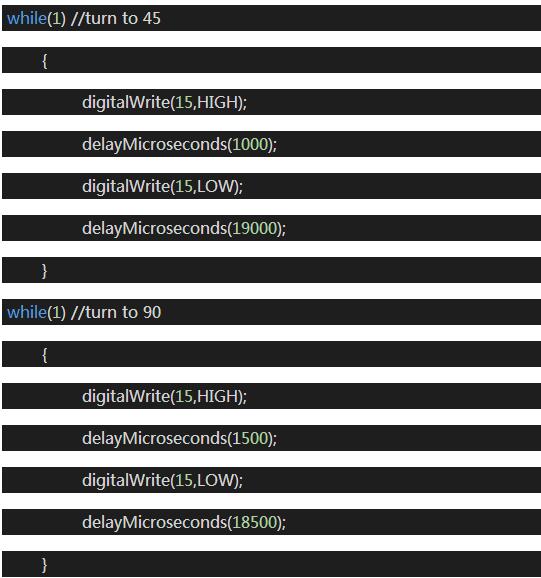
這里可能有人要說為啥不用delay()函數呢,因為delay函數精確到毫秒,當我傳1.5給它的時候,和傳1給它的時候,你會發現舵機都是轉向45度位置,因為delay(int x),當1.5傳過去的時候精度丟失了。(我一開始就犯了這個錯誤,尷尬啊)
到這里我想你應該已經知道怎么旋轉45度,90度,等等了吧。然后你可能發現舵機旋轉的太快,可能不受自己的控制了。這里我就要給你提供一種思路,怎么去解決這個問題。
當然,本人能力有限,寫的難免有錯誤,希望指正。
下面我給一個很不錯的鏈接,想深入研究的可以去看看(他用的是單片機)
http://www.njliaohua.com/lhd_5xtsq7jr1e0088t3wpu3_1.html
我是這樣認為的。0.5ms轉向0度,1ms轉向45度,那個這其中是不是經歷了0.5ms,而且轉了45度,所以我就用0.5=500us,500us/45度。然后得出約為11.11us/度。
接下來我的代碼是這樣寫的。
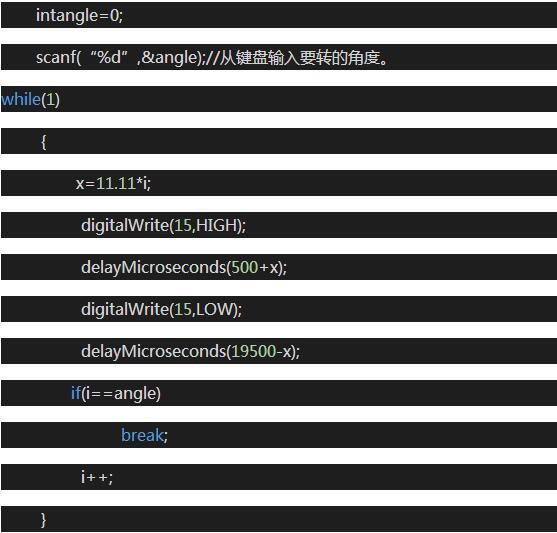
這樣一來速度確實是降了下來,但是每次舵機都要先轉向0度位置,然后才能轉向我們輸入的個角度位置。
樹莓派3b+控制舵機、伺服電機的驅動代碼
#include《stdio.h》
#include《wiringPi.h》
void init();
int main()
{
init();
int angle=0;
scanf(“%d”,&angle);
int i=0;
float x=0;
int k=180;//180次循環的時間夠了
while(k--)
{
x=11.11*i;
digitalWrite(15,HIGH);
delayMicroseconds(500+x);
digitalWrite(15,LOW);
delayMicroseconds(19500-x);
if(i==angle)
break;
i++;
}
return0;
}
void init()
{
wiringPiSetup();
pinMode(15,OUTPUT);
}
-
舵機
+關注
關注
17文章
270瀏覽量
41038 -
樹莓派
+關注
關注
116文章
1707瀏覽量
105648
發布評論請先 登錄
相關推薦
樹莓派教程 詳解樹莓派驅動OLED模塊

請教利用樹莓派制作六足機器人的問題
樹莓派之MPU6050控制舵機轉向

微雪電子樹莓派舵機驅動板 Servo Driver HAT (B)介紹

微雪電子樹莓派舵機驅動板|Servo Driver HAT介紹
樹莓派+單片機+驅動電機

樹莓派遙控視頻小車(附代碼)
樹莓派驅動步進電機
樹莓派驅動步進電機
樹莓派控制步進電機





 工商網監
工商網監
評論