 “車聯網”的前世今生
“車聯網”的前世今生

從汽車誕生的那一天起,對于城市交通,安全和便捷始終是最重要的課題。面對城市道路中日益增長的車輛,以及與日劇增的事故風險和通行壓力,城市管理者和交通領域的科研人員,利用交通信號設施來實現交通控制,并不斷地推陳出新。
19世紀60年代,英國倫敦議會大廈前的十字路口嗎,安裝了世界上第一盞交通信號燈(壁板式燃氣交通信號燈)。它由一位警察牽動皮帶進行燈色切換:紅燈停,綠燈行。雖然緩解了路口的交通壓力,但這第一盞交通信號燈在工作了23天后就爆炸自滅了。
1914 年,美國俄亥俄州克利夫蘭市(Cleveland, Ohio)開始部署電氣交通信號燈用于地面交通控制和協調,這被認為是最早的交通信號控制系統。
1918年,紐約市五號街的一座高塔上出現了三色(紅、黃、綠三種標志)的交通信號燈,這種經典的“配色”一直延續到現在。
1926年,英國的沃爾佛漢普頓首次使用自動化控制器來控制信號燈:按照一個固定的周期切換信號燈的顏色。
20世紀60年代,美國丹佛市通過模擬計算機對交通信號實現集中化的實時性控制,可以同時對道路網中各交叉路口的交通信號進行協調控制。而后,加拿大的多倫多在全市范圍內建成了第一個全市交通信號集中控制與協調系統。
至今,交通信號燈的樣子幾乎沒有什么改變,但交通控制的理論方法和運行系統卻一直在進步。
從人工操作或固定周期式的單點控制;到以協同相鄰道口的周期、保證道路沿線的綠燈具有連續性的干線控制;再到持續優化整個區域交通資源(主要是信號燈的配時)的面控制,如今的交通控制技術,雖然演進出很強的自動化、智能化的特性,但同時也已經達到了性能瓶頸。
采用單一的“紅綠信號燈”模式進行交通控制,已經無法更有效地管理交通資源(實時性不足):紅綠燈只在路口起效,其效用無法覆蓋整條道路;駕駛員可能因為天氣原因,以及在交通擁堵情況下看不清交通信號燈;司機容易陷入“黃燈時兩難境地”(Yellow interval dilemma),即在黃燈閃爍時難以抉擇是“進”還是“停”;雖然在交通網絡中引進了誘導系統(提示路況信息),司機也可以使用實時反饋路況的導航系統,但對道路利用的整體效果并不明顯……
城市道路要容納更多的車輛、滿足更多的出行需求,就需要突破原有的技術領域,朝著更深度的信息化和智能化方向發展。
“智能交通”的想法早在20世紀初就已經出現,它的誕生與城市化發展戚戚相關:城市管理者希望它能夠解決城市道路日益擁堵的狀態,以及所造成的經濟損失。在20世界90年代,智能交通系統(ITS,Intelligent Transportation System)的概念逐漸成型。
目前,ITS已經在許多發達國家獲得了廣泛應用,其研究推進工作呈現“三足鼎立(領先)”的局面:美國、歐洲、日本(美國智能運輸協會-ITS America、歐洲道路運輸通信技術實用化促進組織-ERTICO、日本道路交通車輛智能化推進協會-VERTIS)。
人們建設ITS的初衷是希望通過在交通控制系統中融入更多的信息技術,以解決交通的資源利用率和安全性的問題。不過如今,它還被寄予了其它功能:增加旅途的舒適性、輔助或自動駕駛、運輸效能提升(包括提高能源利用率、提供最短路徑)、增值服務等等。
智能交通是一門交叉學科,它涉及各種交通要素:道路、車輛、駕駛者和乘客、收費站和車站、信息技術、行人、法規等;包含各類交通管理系統和服務:交通信息服務、車輛管理、電子收費、緊急救援、誘導信息服務等。(注釋:《解讀物聯網》-機械工業出版社)
智能交通的應用主要包括車輛行駛安全、電子收費、公路及車輛管理、導航定位、商業車隊管理等等領域。
智能交通的構建,是信息技術領域和交通運輸領域的深度融合。通信網絡、計算機技術、傳感技術、軟件工業是實現ITS的關鍵。
世界道路協會的《智能交通系統手冊》對ITS定義:在交通運輸領域集成應用“自動數據感知與采集”、“網絡通信”、“信息處理”與“智能控制”,使得交通運輸業變得更加安全、高效、環保和舒適的各種信信息系統的統稱。
從ITS定義中能夠看到:智能交通系統發展的本質,就是“信息技術”與“交通技術”的組合進化。

3.1 70年代起步:
1970年,美國提出了電子道路導航系統(Electronic Route-Guidance System,ERGS),通過路邊設備提供車輛導航服務。
1973年,日本的汽車交通控制綜合系統(Comprehensive Automobile Traffic Control system,CACS)項目上線,這是日本第一個ITS項目。通過路邊設備引導車輛行駛,減少擁堵,避免安全事故,以及提供應急服務。
3.2 80年代三強局勢:
在1986年歐盟啟動了“最高效及安全歐洲交通項目(Program for European Traffic with Highest Efficiency and Unprecedented Safety,PROMETHEUS)”。
意在研究車-車通信(PRO-NET)、車-路通信(PRO-ROAD)、輔助駕駛(PRO-CAR)等先進的交通信息技術。此外,歐盟同期開始研究的還有“保障車輛安全的歐洲道路基礎設施計劃(DRIVE)”。
2000年歐盟發布的KAREN項目包含了ITS體系框架。2009年,開始委托多家機構制定統一的ITS標準。2011年,歐盟啟動了Drive C2X車聯網項目,意在打造一個安全、高效、環保的行車環境,該項目于2014年宣布試驗成功。
1992年,美國制訂了智能車輛道路系統(IVHS)的研究計劃,并在1995年由運輸部正式公布了“國家ITS項目規劃”。2009年,美國交通部發布了《智能交通系統戰略研究計劃:2010-2014》,明確了車聯網的構想。
2014年美國計劃強制推廣車際通訊(美國國家高速公路安全管理局:《法規制定預告通知》、《V2V技術應用已準備就緒》),并在2015年由美國交通運輸部啟動互聯汽車項目。
在前期研究成果的基礎上(車間通信系統-RACS、交通信息通信系統-TICS),1995年日本道路交通情報中心建成了道路交通情報通信系統(VICS,Vehicle Information and Communication System Center)。司機可以通過裝載VICS系統的車載導航器,享受無償交通信息服務。
2000年開始,ETC電子收費系統(electronic toll collection)在日本大力發展。
2002年,VICS中心開始向手機、掌上電腦、個人電腦等終端提供交通信息。
2003年,高級公路輔助導航系統(AHS,advanced cruise-assist highway systems)的項目正式開始實施,該系統通過路-車的通信協同(采用DSRC,專用短程通信),為駕駛人員提供安全行車服務。
車聯網/車載網是ITS的重要組成部分。
在智能交通中,相對于其它領域的研究(例如城市公共交通管理、交通誘導與服務等),對車聯網/車載網的研究起步最晚,有些領域還處于最初級的階段。
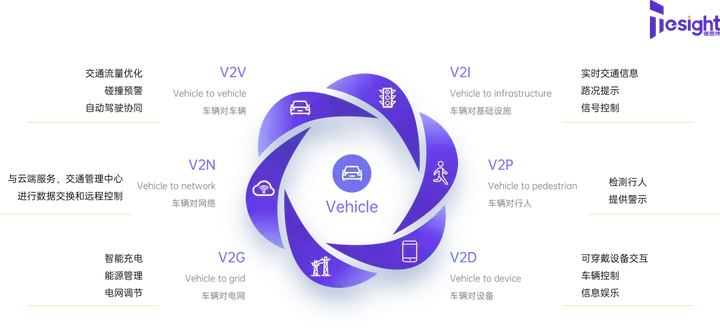
全球范圍內,最主要的車聯網通信技術標準有兩種:DSRC(IEEE)和LTE-V(3GPP),支持車輛連接到所有的相關事物,包括道路設施、其它車輛、人等。
4.1 DSRC
在智能交通的發展中,專用短程通信(DeDICated Short Range CommunICation,簡稱DSRC)技術是ITS的基礎之一。隨著智能交通的發展而不斷發展,相關技術在90年代開始取得了突破性進展。
1992年,ASTM美國材料試驗學會(American Society for Testing Materials)主要針對ETC業務的開發而最先提出DSRC技術的概念,該通信技術采用915 MHz頻段開展標準化工作。
1999年10月,美國聯邦通信委員會在5.9GHz頻段中為V2V和V2I兩種類型的短距離連接(DSRC,Dedicated Short-Range Communication)劃分了專用頻道。
2001年,ASTM的相關標準委員會選定IEEE802.11a作為DSRC底層無線通信協議。
在2004年,IEEE修訂了IEEE802.11p協議規范,并成立工作組啟動了車輛無線接入(WAVE,Wireless Access in the Vehicles Environment)的標準制定工作,為進一步開展車路協同的技術研究,啟動VII/IntelliDrive項目。
同年的美國費城,ACM(國際計算機組織,Association Computing Machinery)第一屆VANET學術會議召開,“VANET”這個縮寫單詞第一次被正式使用。
2010年,WAVE工作組正式發布了IEEE 802.11p車聯網通信標準。該標準作為車載電子無線通信規范,應用于智能交通(ITS)系統,成為了DSRC標準下的底層協議(MAC層/PHY層,即OSI模型中的數據鏈路層和物理層)。
歐洲早在1994年就由CEN(歐洲標準委員會)開始了DSRC標準的起草。1995 年,歐洲 DSRC 標準草案完成,并于1997年獲得通過(ENV12253“5.8GHz-DSRC-物理層” 和ENV12795“DSRC-數據鏈路層”)。
2001年6家歐洲汽車廠商(寶馬、大眾、戴姆勒-克萊斯勒等)聯合供應商、研究機構成立了“車輛間通信聯盟(C2C-CC,Car 2 Car Communication Consortium)”,聯盟旨在利用無線LAN技術開發車間通信功能,并制定歐洲的車輛與基礎設備之間的通信標準。
為解決車間通信問題,2004年寶馬和大眾加入了FleetNet項目(2000年)的后續工程:NOW(Network on Wheels),主要針對車間通信和保證數據安全性進行研究。
在2008年,歐洲電信標準協會ETSI在5.9GHz頻段為車載網劃分了專用頻道。
在歐盟的第六框架計劃中諸多智能交通項目(同時也是“eSafety項目”)都在推動車聯網/車載網相關技術的發展:COOPERS(智能交通安全協助系統-Austria tech公司)、CVIS(車路協同系統-歐洲智能交通協會)、SAFESPOT(SAFESPOT項目-菲亞特研究中心)等。
1994年日本聯合多家企業進行了ETC收費系統的野外試驗,并對DSRC頻率進行了選頻。1997 年,日本 TC204 委員會制定了日本的 DSRC 標準。2001年ETC系統正式開始服務。
1999年日本(23家企業)啟動了Smart Way(智能道路系統),主要是在交通場景中提供各種信息交換的基礎設施,各類設施的通信方式主要都采用了DSRC。(注釋:日本的VICS、ETC、AHS目前都屬于Smart Way項目)2007年,日本初步完成了Smart Way項目部分路段的試驗計劃。
日本的DSRC由ISO/TC204制定,并支持最終的IEEE 802.11p版本(美國)。
4.2 LTE-V
在2006年,多家通信和汽車領域企業(愛立信、沃達豐、MAN Trucks、大眾)攜手推進智能汽車協作通信項目(Cocar, CoperativeCars),志在研究利用蜂窩通信技術(采用3G網絡)實現行車預警信息的相互傳遞(車輛之間間、車與道路管理系統之間)。
隨后,寶馬和福特公司加入了CoCarX項目,在LTE網絡覆蓋下,車間的協作通信取得了較好的性能測試結果。
2012年,歐盟資助LTEBE-IT項目,開展LTE演進協議在ITS中的應用研究。
2015年,3GPP國際組織分別設立了專題“LTE對V2X服務支持的研究”和“基于LTE網絡技術的V2X可行性服務研究”,正式啟動LTE V2X技術標準化的研究。行業內,將“LTE-V2X”(LTE: Long Term Evolution,即4G通信技術;V2X:Vehicle to Everything)簡寫為“LTE-V”,它是基于無線蜂窩通信的車聯技術,在業內也稱為“C-V2X(Cellular- Vehicle to Everything)”。國內多家通信企業(華為、大唐、中興)參與了LTE-V的研發。
2016年9月3GPP完成了“基于LTE PC5接口的V2V”標準制定,其標準規范引入了LTE-D2D的SideLink鏈路技術,實現了高速度、高密度行車場景下的車與車直接通信。這種允許車間直連的通信方式,和以往的蜂窩通信技術有較大差異,也稱為“分布式(LTE-V-Direct)”工作方式。
(與“分布式(LTE-V-Direct)”相對的傳統蜂窩通信工作方式是“集中式(LTE-V-Cell)”,以基站為信息轉發節點進行通信)
2017年3月,3GPP 在“基于LTE的V2X業務”項目中,完成了車聯網中各類型通信(車與車的蜂窩網通信、車與道路設施通信、車與人通信等)的標準化制定。
在3GPP的5G通信標準中,LTE-V將逐步演進為NR-V2X。
4.3 車聯網和智能交通
從DSRC和LTE-V的發展歷史來看,DSRC起步較早,并且已經在許多ITS的研究項目中嶄露頭角,實現了一部分相對成熟的車聯網應用。(例如日本的Smart Way中的各類子項目、歐洲的COOPERS、CVIS、SAFESPOT、PreVENT等項目、美國的ETC應用、VII/IntelliDrive等項目)。
在LTE-V標準之前,車輛使用3/4G的蜂窩無線技術連接到網絡,其稱之為Telematics(Telecommunications和Informatica的合成詞,意為“遠距離通信技術和信息技術結合的網絡”)。
Telematics是車聯網的一種常見形式,但由于只實現了車與云端的聯接,所以也被理解為“狹義車聯網”。LTE-V的出現,是試圖打破原本蜂窩接入網絡只能作為DSRC技術補充的境地,將短距、直連、非IP化的通信技術(PC5接口)和蜂窩通信技術進行融合,從而在車聯網領域形成一套完整的通信技術體系。
從各國對車聯網的研究模式來看,由于ITS應用場景復雜、需求多樣、終端種類繁多,所以車聯網的研究需要和ITS應用的開發同步推進,以滿足行車過程中對各類技術細節的要求。
為了實現更高層次的安全、高效、環保的生產(行車)目標,車輛(以及交通配套設備和系統)需要具備更多更強的感知能力、通信能力、計算能力(智能),通過增加交通系統整體的信息化能力以實現整個交通領域的升級。
也就是說,車聯網技術是和傳感、計算(例如自動駕駛)、軟件開發,等信息化技術同步發展的,未來的“智能交通”是交通(道路)網絡和信息網絡的深度交融。
-
智能交通
+關注
關注
12文章
805瀏覽量
43506 -
車聯網
+關注
關注
76文章
2594瀏覽量
91693
原文標題:一文看懂“車聯網”的前世今生
文章出處:【微信號:hr_opt,微信公眾號:網優雇傭軍】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
安泰功率放大器應用:納米材料的前世今生
車聯網HIL仿真測試解決方案

5G?車聯網賦能消防車調度,推動高效智能消防救援

芯盾時代如何應對車聯網信息安全挑戰
深入了解Java泛型——從前世今生到PECS原則

車聯網系統靜電浪涌防護策略
車載網關:車聯網的新引擎
深度解析消費者最關心的車聯網核心問題

物聯網的前世今生:什么是物聯網?實現物聯網的無線標準解讀

嵌入式系統的前世今生

IPv6成為車聯網技術中的重要基石








 工商網監
工商網監
評論