 關于基于雙核DSP的被動聲探測系統的設計
關于基于雙核DSP的被動聲探測系統的設計
0 引言
被動聲探測技術使用傳感器陣列接收各種目標輻射的噪聲信號,運用陣列信號處理和信號識別等技術,確定目標的方位、航跡和類型。被動聲探測技術具有全被動、隱蔽性強、全天候和低功耗、低成本的優點,特別適合夜間、霧霾天等能見度不良、通視性差或電磁環境復雜條件下對運動目標的感知,是戰場信息偵查及城市安全防護領域不可或缺的信息獲取手段。
聲音信號容易受到周圍環境噪聲的干擾,引起虛警或探測性能下降。為了提高被動聲探測的準確性,需要引入噪聲抑制、目標分類識別等算法,這對信號處理器的硬件性能提出了較高的要求。傳統的被動聲探測系統往往需要使用多片DSP并行處理的硬件架構來滿足需求[1-2],因而帶來了產品體積功耗的增加以及生產工藝復雜度的提升。近年來,陣列信號處理和聲探測領域都有很大的發展,出現了一些新的技術和算法[3-4],受限于嵌入式處理平臺的性能,這些技術并未實現工程化批量應用。
隨著集成電路技術的不斷發展,嵌入式應用中的多核DSP芯片應運而生,給高性能數字信號處理系統設計帶來了新的解決方案。TMS320C6657[5]是德州儀器(TI)公司推出的一款以KeyStone多內核架構為基礎的雙C66x內核數字信號處理器,非常適合高性能低功耗可編程應用。本文基于近幾年聲探測領域的新技術,提出了一種以TMS320C6657為信號處理單元,使用24位高分辨率ADC采樣的被動聲探測系統,實現數據的采集、目標定向和分類識別等功能,具有高實時性、良好的功能擴展性等特點,性能指標較原有系統有了較大的提高。
1 系統總體設計
系統由聲傳感器陣列和聲探測主機兩部分組成。
聲傳感器陣列是由若干個傳聲器按照一定規則組成的陣列,接收探測目標輻射的噪聲信號。
聲探測主機由模擬電路、數字電路和控制電路組成。模擬電路對聲傳感器陣列接收的微弱信號進行放大、調理、均衡,并將預處理后的信號送至數字電路進行處理;數字電路實現對目標聲信號的模數轉換以及定向、識別算法;控制電路用于實現系統的人機操作和外部接口功能。
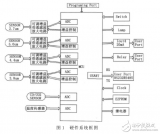
系統組成如圖1所示。
2 硬件設計
2.1 模擬電路
根據目標信號特征和陣列信號處理對信號拾取的要求,聲傳感器陣列各傳感器及其對應的模擬通道之間的幅頻和相頻特性應具有較高的一致性。
設計中選用高品質低噪聲運算放大器作為模擬電路的核心器件,設計了固定增益的放大電路和四階巴特沃斯濾波器電路。在工藝上,選用優質電路板材,并通過對關鍵位置的阻容元件進行嚴格的環境應力篩選和一致性挑選,以控制電路的一致性和穩定性。
傳統的聲探測系統采用16位以下ADC進行模數轉換,而受分辨率的影響,為了達到較高的轉換精度,需要根據信號的幅度對模擬電路的放大增益進行自動調整。由于模擬電路是電噪聲敏感性單元,為了避免數字噪聲的影響,增益控制信號需要進行隔離設計。此外,在增益改變的瞬間,會產生非正常的數據突變,對系統的探測性能產生不確定的影響。
為了避免這些問題,本設計根據目標聲信號的特征和系統對探測距離的要求,選定了一個固定的增益倍數,而分辨率問題則由高分辨率模數轉換來解決。模擬電路功能組成如圖2所示。
2.2 數字電路
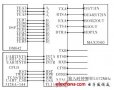
數字電路首先對多個通道的模擬信號進行模數轉換,然后將得到的數字信號送入雙核DSP進行實時處理,完成對目標的定向和識別,并把處理的結果發送給控制電路。數字電路原理框圖如圖3所示。
本系統的模數轉換電路使用TI公司的8路同步采樣24位分辨率的ΔΣ模數轉換芯片ADS1278,保證了在不改變前端放大電路增益條件下的轉換分辨率,避免了增益檔跳變所帶來的影響。為達到最佳性能,每路輸入信號經過差分驅動轉換成差分信號供給ADS1278的輸入端。差分驅動器選用TI的低功耗全差分4路放大器THS4524。
本系統將兩片ADS1278用菊花鏈的方式級聯,實現了16路模擬通道的同步采樣。ADS1278工作在SPI模式下,使用FPGA對其進行控制。
FPGA主要有3個功能:一是用于DSP的復位、上電順序控制以及啟動加載模式的選擇;二是完成數據采集,包括ADC芯片工作時鐘產生、SPI總線控制等;三是將數據通過Upp接口發送給DSP進行處理。FPGA選用XILINX公司的Spartan6系列芯片XC6SLX9FTG256。
實現定向、識別算法的核心器件是雙核處理器芯片TMS320C6657。外掛SPI接口的NOR Flash用于存儲固件,一片128 MB的DDR3用作擴展內存。DSP的兩個內核運行在1 GHz的主頻下,core0用于引導加載固件、內核及外設的初始化配置、數據采集以及定向算法,core1用于分類識別算法。
最終的處理結果由UART接口發送給控制電路。
2.3 控制電路
控制電路用于人機交互,包括當前工作狀態指示、OLED顯示屏和小鍵盤的菜單操作,顯示包括自檢結果、目標方位、目標類型在內的各種狀態信息,監控電源電壓、電量以及聲音報警。同時,控制電路將探測結果通過標準的RS232接口輸出,方便系統擴展多站融合、遠程監控等功能。控制電路的核心器件為微控制器芯片MSP430F5438A,該芯片存儲資源和外設資源豐富,僅需少量的外圍器件就可完成控制電路的功能。
控制電路的原理框圖如圖4所示。
3 探測軟件設計
聲探測軟件的核心功能是實現對目標的聲學定向和識別,相應的數據輸入、參數設置、通信和自檢等軟件接口用以確保系統運行時的正常工作。
探測軟件的全部功能可以分為定向模塊、識別模塊、自檢模塊和信息交互接口模塊。軟件構成如圖5所示。本文重點介紹定向和識別兩個模塊。
3.1 定向模塊
諸如空中飛行器、地面車輛等目標,由于在結構上具有周期轉動機制(發動機、螺旋槳等),其輻射噪聲信號的功率譜主要是由離散譜疊加在連續譜上,呈現較強的線譜特征,且線譜之間具有明顯的諧波關系。
定向軟件模塊針對目標聲信號的特征,采用相應空時信號處理方法實現對目標的定向功能。輸入為16個通道的陣列信號,處理后獲得目標個數信息、各個目標的方位、能量標記信息。
針對環境中有強噪聲干擾的情況,軟件在開機初始時間進行短時環境噪聲學習,判斷是否需要運用自適應噪聲抵消技術提升信噪比。之后綜合運用小波線譜檢測和傅里葉線譜檢測,加強目標線譜集信號的檢測能力,提高發現概率。線譜集檢測流程如圖6所示。
在定向環節,采用波束域濾波技術,通過對其他方向噪聲的抑制,增強對目標方向的接收信噪比。定向算法流程如圖7所示。
3.2 識別模塊
目標識別軟件是采用數學和智能方法對目標信號的特征進行提取和選擇,對模式特征進行分類決策后得到目標類型。通過對多種螺旋槳飛機、固定翼飛機和地面車輛等目標的輻射噪聲進行分析可知,其功率譜特征能夠區分各類目標。
在遠距離目標探測時,聲信號經過長距離傳播衰減較大,聲傳感器陣列接收到的信號信噪比較低,必須進行信號增強。信號增強方法可以與定向模塊中的線譜集檢測方法復用。
目標識別分類流程包含了信號采集、信號預處理、特征提取及選擇、識別分類、融合識別5大部分,每個部分包含了若干細節流程。各通道的目標聲信號都包含有環境噪聲、風噪聲等其他噪聲,這些噪聲有的屬于白噪聲,有的屬于色噪聲,噪聲的存在降低了有效聲信號的信噪比,在時域對各通道信號進行濾波可提高信噪比,提取能充分體現目標類型的特征,基于不同領域的特征設計子神經網絡、模板匹配分類器,各目標分類器都輸出目標識別類型置信度,利用融合識別技術對各目標類型置信度進行融合識別,最終輸出目標類型。整體識別分類流程圖如圖8所示。
3.3 雙核并行處理設計
本系統主要完成定向和識別算法。根據計算量,將兩個算法分到兩個核中。Core0主要完成定向算法,Core1主要完成識別算法。因為目標識別需要用到定向算法的結果,兩個Core采用串行計算的方式,Core1在第3秒輸出第1秒的定向和識別結果。并行處理的軟件時序圖如圖9所示。
并行處理設計中,數據的共享和核間通信尤為重要。TMS320C6657片內集成了1 024 KB的共享內存,用于存儲Core0采集的每秒聲陣列數據以及定向算法的結果。核間通信的內容有:Core0通知Core1數據準備完畢;Core0通知Core1已出定向結果;Core1通知Core0數據已經使用完畢。Core1只有在Core0通知后才能訪問共享內存,把數據搬移到自己的L2內存中,而Core0在收到Core1讀取完數據后,就可以隨時更新共享內存中的相應內容。
核間通信(IPC)的功能可以使用中斷的方式,也可以使用查詢的方式。TMS320C6657具有IPC發生寄存器和IPC應答寄存器,可以產生IPC中斷和應答。中斷的方式不需要Core的干預,可以最大限度地節省處理時間。查詢方式在軟件實現上較為簡單,但會浪費一些指令周期。本設計中,通過實測發現每個核運行各自的算法,1秒內的計算還留有較大的時間裕量,因此IPC選用查詢的方式。在程序中定義全局標志位變量,當每個Core完成操作后對標志位置位,另一個Core在需要操作共享內存時就對標志位進行查詢,確保操作的正確性。
4 系統驗證
本設計已經應用到了實際的聲探測領域,實現了對多種目標的定向識別。經過大量的實際測量證明,系統各項指標較傳統聲探測系統有了明顯提高。
雙核DSP的并行數據處理解決了多通道大數據量的實時處理和多種不同目標分類識別、定向算法的處理帶寬問題,使得很多創新型算法得以在嵌入式系統產品中實現。
-
dsp
+關注
關注
553文章
7998瀏覽量
348945 -
探測系統
+關注
關注
0文章
58瀏覽量
11277
發布評論請先 登錄
相關推薦
天基紅外探測系統的雜散光分析與計算
BSD盲點探測系統
基于DSP無人值守地面探測系統的硬件設計
基于DSP的毫米波主被動復合探測器目標識別系統設計【回映分享】
DSP+CPLD空間瞬態光輻射信號實時探測系統
基于DSP_BIOS大空間網絡型火災探測系統設計
基于多DSP并行處理的聲探測系統設計解析

基于單片機和DSP的被動聲目標探測平臺設計方案資料下載

地下車庫CO探測系統的設置與安裝
無人機探測系統可使用GC1101射頻前端集成芯片





 工商網監
工商網監
評論