 學習一下BLDC電機的控制方法,使其高效轉動吧
學習一下BLDC電機的控制方法,使其高效轉動吧
BLDC電機具備效率高、可小型化、壽命長、易控制等優點,受到了廣泛關注。這次就來學習一下BLDC電機的控制方法,使其高效轉動吧。
僅靠連接無法轉動
內轉子型BLDC電機是典型的BLDC電機的一種,其外觀與內部構造如下所示(圖1)。帶刷DC電機(以下稱為DC電機)的轉子上有線圈,外側放有永磁體。BLDC電機的轉子上有永磁體,外側是線圈。BLCD電機的轉子沒有線圈,是永磁體,因此沒有必要在轉子上通電。實現了不帶通電用的電刷的“無刷型”。
另一方面,與DC電機相比,控制也變得更難了。并不是只要將電機上的電纜接上電源就好了。本來就連電纜數目都不一樣。和“將正極(+)和負極(-)連上電源”的方式不同。
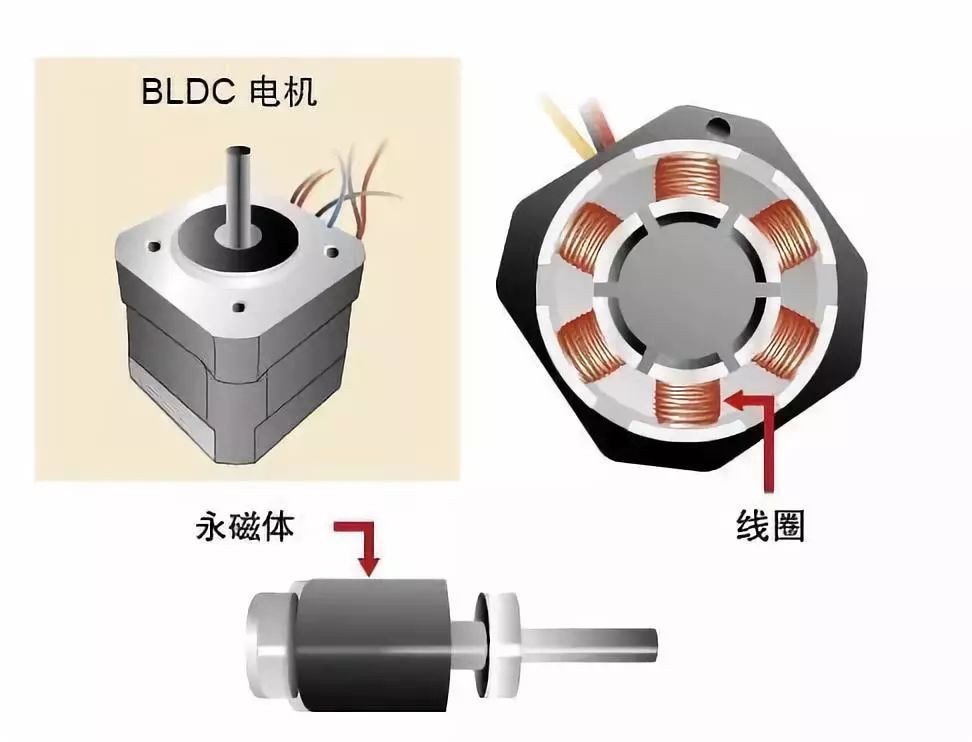
圖1:BLDC電機的外觀及內部構造
轉子是永磁體,因此無法通電。無需電刷及換向器,可謀求延長使用壽命
改變磁通量的方向
為了轉動BLDC電機,必須控制線圈的電流方向及時機。圖2-A是將BLDC電機的定子(線圈)和轉子(永磁體)模式化的結果。使用該圖片,思考一下轉子旋轉的情況吧。思考使用3個線圈的情況。雖然實際上也有使用6個或以上的線圈的情況,但在考慮原理的基礎上,每120度放一個線圈,使用3個線圈。電機將電氣(電壓、電流)轉換為機械性旋轉。圖2-A的BLDC電機又是如何轉動呢?先來看一看電機中發生了什么吧。
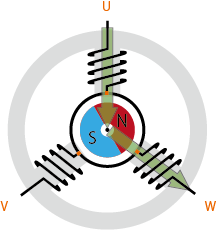
圖2-A:BLDC電機轉動原理BLDC電機中每隔120度放置一個線圈,總共放置三個線圈,控制通電相或線圈的電流
如圖2-A所示,BLDC電機使用3個線圈。這三個線圈用以在通電后生成磁通量,將其命名為U、V、W。將該線圈通電試試看吧。線圈U(以下簡稱為“線圈”)上的電流路徑記為U相,V的記錄為V相,W的記錄為W相。接下來看一看U相吧。向U相通電后,將產生如圖2-B所示的箭頭方向的磁通量。但實際上,U、V、W的電纜都是互相連接著的,因此無法僅向U相通電。在這里,從U相向W相通電,會如圖2-C所示在U、W產生磁通量。合成U和W的兩個磁通量,變為圖2-D所示的較大的磁通量。永磁體將進行旋轉,以使該合成磁通量與中央的永磁體(轉子)的N極方向相同。
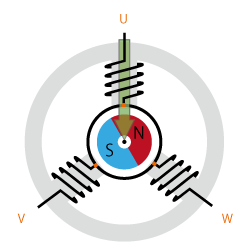
圖2-B:BLDC電機的轉動原理從U相向W向通電。首先,只關注線圈U部分,則發現會產生如箭頭般的磁通量
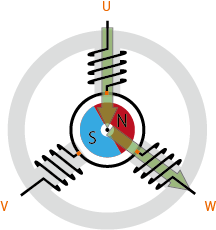
圖2-C:BLDC電機的轉動原理從U相向W相通電,則會產生方向不同的2個磁通量
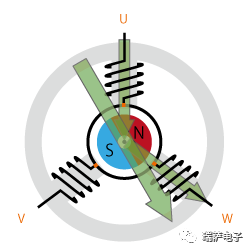
圖2-D:BLDC電機的轉動原理從U相向W相通電,可以認為產生了兩個磁通量合成的磁通量
若改變合成磁通量的方向,則永磁體也會隨之改變。配合永磁體的位置,切換U相、V相、W相中通電的相,以變更合成磁通量的方向。連續執行此操作,則合成磁通量將發生旋轉,從而產生磁場,轉子旋轉。
圖3所示的是通電相與合成磁通量的關系。在該例中,按順序從1-6變更通電模式,則合成磁通量將順時針旋轉。通過變更合成磁通量的方向,控制速度,可控制轉子的旋轉速度。將切換這6種通電模式,控制電機的控制方法稱為“120度通電控制”。
圖3:轉子的永久磁石會像被合成磁通量牽引一樣旋轉,電機的軸也會因此旋轉
使用正弦波控制,進行流暢的轉動
接下來,盡管在120度通電控制下合成磁通量的方向會發生旋轉,但其方向不過只有6種。比如將圖3的“通電模式1”改為“通電模式2”,則合成磁通量的方向將變化60度。然后轉子將像被吸引一樣發生旋轉。接下來,從“通電模式2”改為“通電模式3”,則合成磁通量的方向將再次變化60度。轉子將再次被該變化所吸引。這一現象將反復出現。這一動作將變得生硬。有時這動作還會發出噪音。
能消除120度通電控制的缺點,實現流暢的轉動的正是“正弦波控制”。在120度通電控制中,合成磁通量被固定在了6個方向。進行控制,使其進行連續的變化。在圖2-C的例子中,U和W生成的磁通量大小相同。但是,若能較好地控制U相、V相、W相,則可讓線圈各自生成大小各異的磁通量,精密地控制合成磁通量的方向。調整U相、V相、W相各相的電流大小,與此同時生成了合成磁通量。通過控制這一磁通量連續生成,可使電機流暢地轉動。
圖4:正弦波控制正弦波控制可控制3相上的電流,生成合成磁通量,實現流暢的轉動。可生成120度通電控制無法生成的方向上生成合成磁通量
使用逆變器控制電機
那么U、V、W各相上的電流又如何呢?為便于理解,回想120度通電控制的情況看看吧。請再次查看圖3。在通電模式1時,電流從U流至W;在通電模式2時,電流從U流至V。可以看出,每當有電流流動的線圈的組合發生改變時,合成磁通量箭頭的方向也會發生變化。
接下來,請看通電模式4。在該模式下,電流從W流至U,與通電模式1的方向相反。在DC電機中,像這樣的電流方向的轉換是由換向器和刷子的組合來進行了。但是,BLDC電機不使用這樣的接觸型的方法。使用逆變器電路,更改電流的方向。在控制BLDC電機時,一般使用的是逆變器電路。
另外逆變器電路可改變各相中的外加電壓,調整電流值。電壓的調整中,常用的是PWM(Pulse Width Modulation=脈沖寬度調制)。PWM是一種通過調整脈沖ON/OFF的時間長度改變電壓的方法,重要的是ON時間和OFF時間的比率(占空比)變化。若ON的比率較高,可以得到和提高電壓相同的效果。若ON的比率下降,則可以得到和電壓降低相同的效果(圖5)。
為了實現PWM,現在還有配備了專用硬件的微電腦。進行正弦波控制時需控制3相的電壓,因此比起只有2相通電的120度通電控制來說,軟件要稍稍復雜一些。逆變器是對驅動BLDC電機必要的電路。交流電機中也使用了逆變器,但可以認為家電產品中所說的“逆變器式”幾乎使用的是BLDC電機。
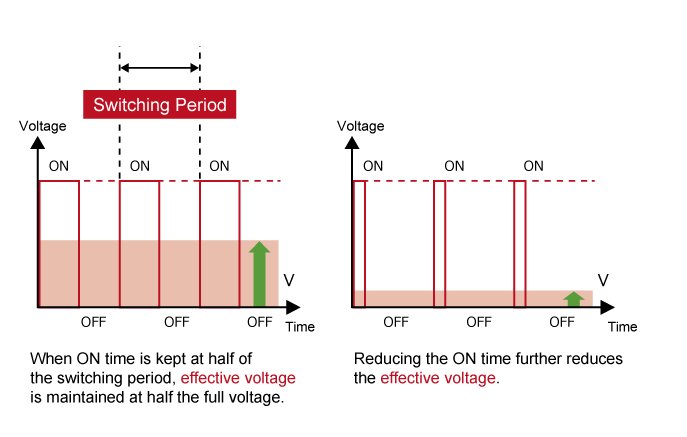
圖5:PWM輸出與輸出電壓的關系變更某時間內的ON時間,以變更電壓的有效值。ON時間越長,有效值越接近施加100%電壓時(ON時)的電壓
使用位置傳感器的BLDC電機
以上是BLDC電機的控制的概況。BLDC電機通過改變線圈生成的合成磁通量的方向,使轉子的永磁體隨之變化。
實際上,在以上的說明中,還有一點沒有提到。即BLDC電機中的傳感器的存在。BLDC電機的控制是配合著轉子(永磁體)的位置(角度)進行的。因此,獲取轉子位置的傳感器是必需的。若沒有傳感器得知永磁體的方向時,轉子可能會轉至意料之外的方向。有傳感器提供信息的話,就不會出現這樣的情況了。
表1中顯示的是BLDC電機主要的位置檢測用傳感器的種類。根據控制方式的不同,需要的傳感器也是不同的。在120度通電控制中,為判斷要對哪個相通電,配備了可每60度輸入一次信號的霍爾效應傳感器。另一方面,對于精密控制合成磁通量的“矢量控制”(在下一項中說明)來說,轉角傳感器或光電編碼器等高精度傳感器較為有效。
通過使用這些傳感器可以檢測出位置,但也會帶來一些缺點。傳感器防塵能力較弱,而且維護也是不可或缺的。可使用的溫度范圍也會縮小。使用傳感器或為此增加配線都會造成成本的上升,而且高精度傳感器本身就價格高昂。于是,“無傳感器”這一方式登場了。它不使用位置檢測用傳感器,以此控制成本,且不需要傳感器相關的維護。但此次為了說明原理,因此假定已從位置傳感器獲得了信息來吧。
表1:位置檢測專用傳感器的種類及特征
傳感器
種類
主要用途
特征
霍爾效應傳感器
120度通電
控制
每60度獲取一次信號。價格較低。不耐熱。
光電編碼器
正弦波控制、矢量控制
有增量型(可得知原位置開始的移動距離)和絕對型(可得知當前位置的角度)兩種。分辨率高,但防塵埃能力較弱。
轉角傳感器
正弦波控制、矢量控制
分辨率高。即使在牢固的惡劣環境下也可使用。
通過矢量控制時刻保持高效率
正弦波控制為3相通電,流暢地改變合成磁通量的方向,因此轉子將流暢地旋轉。120度通電控制切換了U相、V相、W相中的2相,以此來使電機轉動,而正弦波控制則需要精確地控制3相的電流。而且控制的值是時刻變化的交流值,因此,控制變得更為困難。
在這里登場的便是矢量控制了。矢量控制可通過坐標變換,把3相的交流值作為2相的直流值進行計算,因此可簡化控制。但是,矢量控制計算需要高分辨率下的轉子的位置信息。位置檢測有兩種方法,即使用光電編碼器或轉角傳感器等位置傳感器的方法,以及根據各相的電流值進行推算的無傳感器方法。通過該坐標變換可直接控制扭矩(旋轉力)的相關電流值,從而實現沒有多余電流的高效控制。
但是,矢量控制中需要進行使用三角函數的坐標變換,或復雜的計算處理。因此,大多情況下都會使用計算能力較強的微電腦作為控制用微電腦,比如配備了FPU(浮點運算器)的微電腦等。
推薦課程:
張飛軟硬開源,基于STM32BLDC直流無刷電機驅動器視頻套件
http://t.elecfans.com/topic/42.html?elecfans_trackid=fsy_post
-
電機
+關注
關注
142文章
9021瀏覽量
145494 -
BLDC
+關注
關注
206文章
802瀏覽量
96915 -
永磁體
+關注
關注
0文章
124瀏覽量
5493
原文標題:工程師學校丨BLDC電機的控制
文章出處:【微信號:renesas_china,微信公眾號:renesas_china】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
BLDC的無感控制方法
BLDC的無感控制方法
復雜BLDC控制帶來更高效電機應用






 工商網監
工商網監
評論