") 淺析Apollo 2.5限定場(chǎng)景低成本技術(shù)方案
淺析Apollo 2.5限定場(chǎng)景低成本技術(shù)方案
百度Apollo自動(dòng)駕駛線下公開(kāi)課于6月23日在上海舉行,來(lái)自Apollo團(tuán)隊(duì)的資深架構(gòu)師-朱帆老師對(duì)Apollo 2.5自動(dòng)駕駛規(guī)劃控制系統(tǒng)進(jìn)行了詳細(xì)介紹。
丨技術(shù)難點(diǎn)
規(guī)劃模塊所面臨的技術(shù)難點(diǎn)有三點(diǎn)。
第一,車(chē)輛所處的環(huán)境復(fù)雜度高。因此傳感器檢測(cè)返回的數(shù)據(jù)復(fù)雜,障礙物個(gè)數(shù)種類(lèi)多;路況信息復(fù)雜,在高速上一秒鐘車(chē)輛能跑出30米,情況瞬息萬(wàn)變。
第二,系統(tǒng)對(duì)規(guī)劃模塊的要求高。規(guī)劃模塊需要覆蓋所有的ADAS場(chǎng)景,對(duì)模塊計(jì)算的實(shí)時(shí)性和穩(wěn)定性有著很高的要求。
第三,這是一個(gè)全新的未知領(lǐng)域,能夠從外界獲得的信息有限。雖然有過(guò)去長(zhǎng)期的積累,但是依然有多重難題需要解決。
丨整體思路
下面來(lái)看一下規(guī)劃模塊是如何實(shí)現(xiàn)的。
想象一個(gè)人在開(kāi)車(chē),要從A點(diǎn)開(kāi)到B點(diǎn);他有多種方式可以完成這一任務(wù),但是不同的方式,成本是不一樣的。
那么如何去找一個(gè)成本最低的規(guī)劃曲線呢?開(kāi)發(fā)者面臨的是一個(gè)三維空間中的優(yōu)化問(wèn)題,包括路面的二維平面,也包括時(shí)間維度。這是一個(gè)N立方難度的問(wèn)題,Apollo 2.5的解決方法是,把這個(gè)N立方級(jí)別的問(wèn)題,分拆成兩個(gè)N平方級(jí)別的問(wèn)題。也就是在x-y維度上求解,進(jìn)行路徑規(guī)劃;在路徑規(guī)劃的基礎(chǔ)上,以規(guī)劃出來(lái)的路徑為s軸,在s-t維度上進(jìn)行速度規(guī)劃。
這種降低維度,以退為進(jìn)的方法,是對(duì)規(guī)劃模塊認(rèn)識(shí)上的一個(gè)飛躍。通過(guò)放棄最優(yōu)解的追求轉(zhuǎn)而追求較優(yōu)解,換來(lái)系統(tǒng)運(yùn)算速度、穩(wěn)定性的極大提高,同時(shí)滿(mǎn)足無(wú)人駕駛系統(tǒng)的整體需求。這一點(diǎn)可以類(lèi)比機(jī)器學(xué)習(xí)中SGD的思路,放棄對(duì)精確梯度方向的尋找,轉(zhuǎn)而尋找近似梯度的方向,從而換來(lái)學(xué)習(xí)速率上的提升。
丨整體架構(gòu)
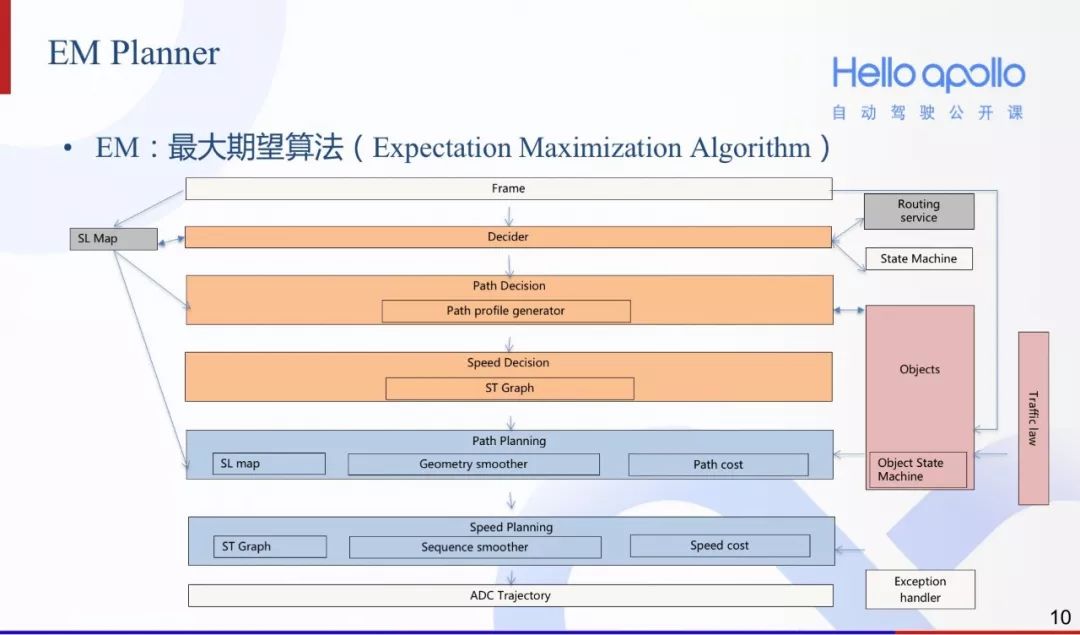
規(guī)劃模塊的架構(gòu)從整體上來(lái)說(shuō),可以分為兩個(gè)部分:一部分負(fù)責(zé)對(duì)數(shù)據(jù)的監(jiān)聽(tīng)、獲取和預(yù)處理;另一部分負(fù)責(zé)管理各個(gè)優(yōu)化模塊。數(shù)據(jù)進(jìn)入后,對(duì)其綜合處理為規(guī)劃模塊的內(nèi)部數(shù)據(jù)結(jié)構(gòu),由任務(wù)管理器調(diào)度合適的優(yōu)化器進(jìn)行各個(gè)優(yōu)化任務(wù)。綜合優(yōu)化的結(jié)果,經(jīng)過(guò)最終的驗(yàn)證后,輸出給控制模塊。
在設(shè)計(jì)上,實(shí)現(xiàn)了策略的可插拔,使得各個(gè)優(yōu)化器可以靈活配置不同策略,提升迭代效率。
相對(duì)于Apollo 2.0,規(guī)劃模塊在延續(xù)了其架構(gòu)上統(tǒng)一、靈活、快捷的優(yōu)點(diǎn)上,在保持已開(kāi)發(fā)算法持續(xù)更新優(yōu)化的同時(shí),又新增了局部坐標(biāo)系以及一種新的速度和路徑同時(shí)優(yōu)化的Lattice planner。
丨規(guī)劃器
Apollo的規(guī)劃模塊目前有三種類(lèi)型的規(guī)劃器:
Apollo 1.0中開(kāi)始開(kāi)放的RTK,也就是循跡Planner;Apollo 1.5中開(kāi)始開(kāi)放的EM Planner,也就是基于動(dòng)態(tài)規(guī)劃Dynamic Programming和二次規(guī)劃Quadratic Programming的路徑規(guī)劃器與速度規(guī)劃器;以及Apollo 2.5中開(kāi)始開(kāi)放的Lattice Planner,一種路徑和速度同時(shí)規(guī)劃的規(guī)劃器。
丨RTK Planner
RTK Planner是規(guī)劃預(yù)先設(shè)置的軌跡,為循即算法使用。
丨EM Planner
EM Planner可以通過(guò)動(dòng)態(tài)規(guī)劃進(jìn)行路徑和速度規(guī)劃。比如說(shuō),路徑規(guī)劃會(huì)在范圍內(nèi)進(jìn)行機(jī)動(dòng)撒點(diǎn),離散化解空間進(jìn)行求解。
要想合理的選擇采樣點(diǎn),首先應(yīng)該直觀的感受一下車(chē)輛和道路。以最常用的林肯MKZ 2016款車(chē)款為例,此車(chē)寬度2米1,那么假設(shè)道路寬度為3.5米,在當(dāng)前道路行駛的時(shí)候就留下了一共1.4米左右的機(jī)動(dòng)范圍。
比如說(shuō),采樣器在垂直于Lane的方向選擇5個(gè)點(diǎn),這種選法每?jī)蓚€(gè)點(diǎn)間隔0.35米,對(duì)于車(chē)輛調(diào)節(jié)來(lái)說(shuō)是合適的;而在沿著道路方向,點(diǎn)的選取不需要特別密集,過(guò)于密集的選擇白白浪費(fèi)了計(jì)算資源,并且在下一步使用光滑曲線連接點(diǎn)的時(shí)候,造成求解的不穩(wěn)定。所以,往往會(huì)根據(jù)當(dāng)前的車(chē)速和路況進(jìn)行選擇,比如每隔15-20米選一組點(diǎn),共選擇4-5組。這樣選點(diǎn),結(jié)合了車(chē)輛與道路的特點(diǎn),并且所有參數(shù)是可以配置的,具有高度的靈活性。
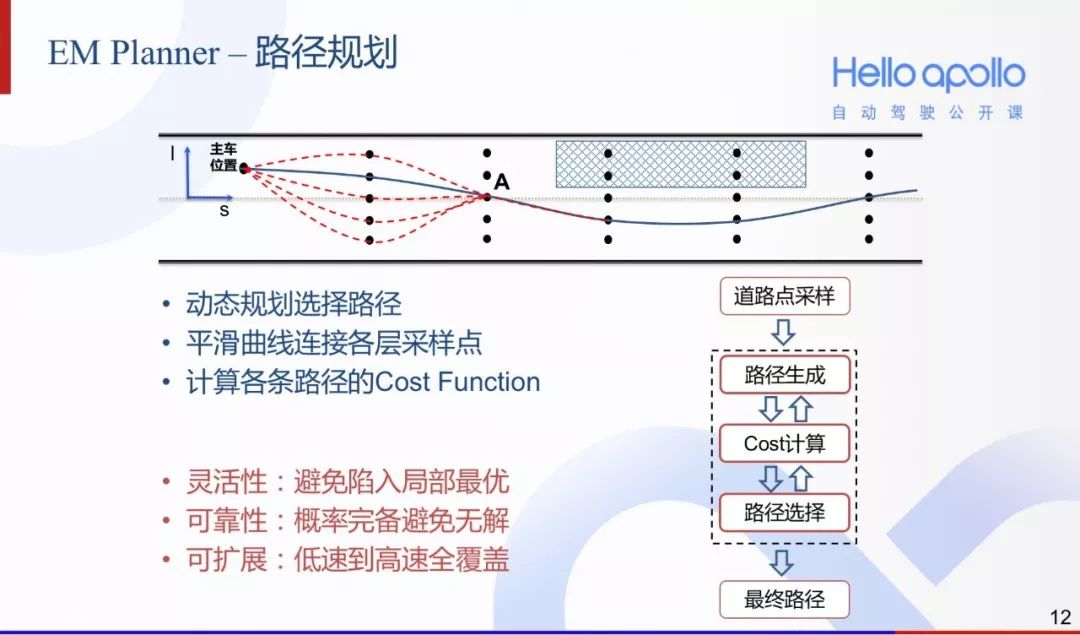
撒點(diǎn)后,通過(guò)Cost Function一層一層的進(jìn)行動(dòng)態(tài)規(guī)劃,從而對(duì)問(wèn)題進(jìn)行了有效的簡(jiǎn)化。然后再通過(guò)平滑的曲線連接各層采樣點(diǎn)得到最終的路徑。其優(yōu)勢(shì)是明顯的:
靈活性:采樣點(diǎn)從左到右覆蓋了整個(gè)可行區(qū)間,避免陷入局部最優(yōu)
可靠性:其利用Cost Function 避免無(wú)解
可拓展:低速到高速全覆蓋
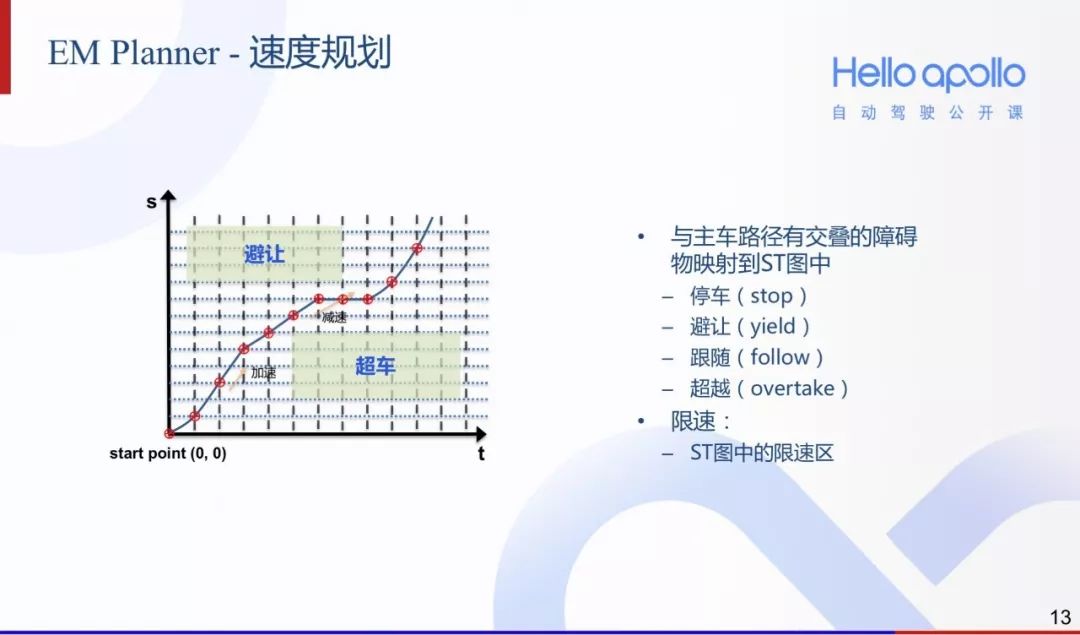
EM Planner中的速度規(guī)劃,也可以采用和路徑規(guī)劃相似的方法。對(duì)解空間進(jìn)行離散化以后,然后通過(guò)動(dòng)態(tài)規(guī)劃進(jìn)行求解。從圖中可以看到,在將與主車(chē)軌跡有重疊的障礙物映射到ST圖以后,速度規(guī)劃可以通過(guò)加速減速勻速等操作,從ST圖中搜索到一條可通行區(qū)間并生成速度規(guī)劃。從最后生成出來(lái)的圖里面,可以解讀出來(lái)相對(duì)于每一個(gè)障礙物的縱向決策。
比如說(shuō),需要避讓或者跟隨一個(gè)障礙物,車(chē)輛就從障礙物ST圖中下方通過(guò)如果需要超越一個(gè)障礙物,那么在ST中車(chē)輛就從其上方通過(guò)。
丨Lattice Planner
接下來(lái)看一下Apollo 2.5中開(kāi)放的新算法Lattice Planner。
Lattice Planner和EM Planner在設(shè)計(jì)上最大的區(qū)別在于,Lattice是橫向縱向綜合求解的,而EM是分開(kāi)求解的。Lattice Planner源于斯坦福大學(xué)參加DARPA無(wú)人駕駛大賽的規(guī)劃算法,Apollo 2.5吸收了其精華,并針對(duì)原有算法進(jìn)行了改進(jìn)和升級(jí)。
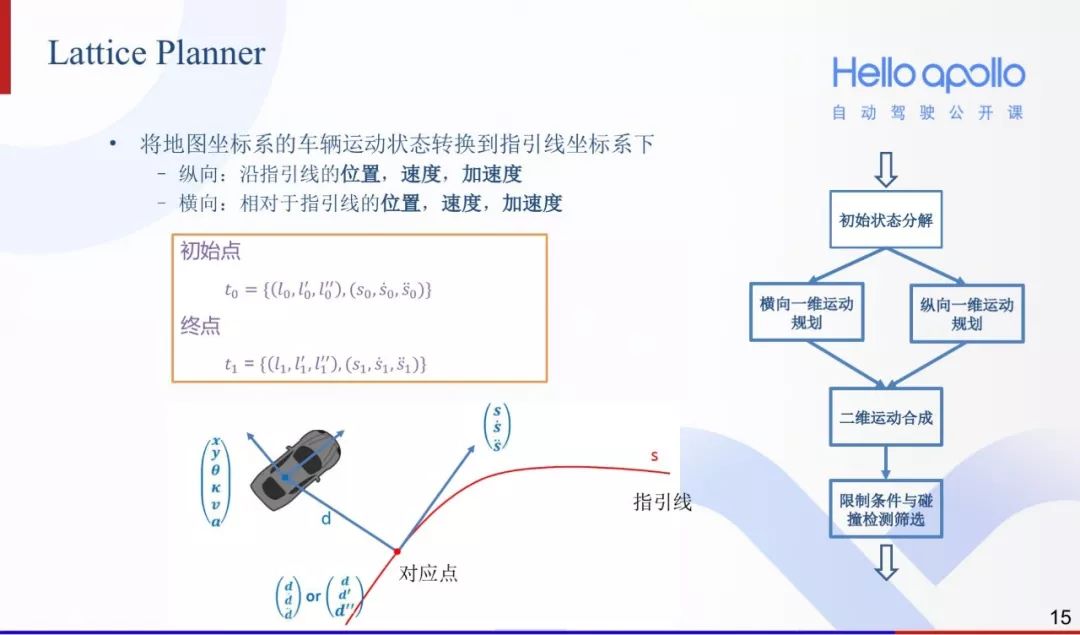
和EM planner一樣,Lattice Planner也將軌跡規(guī)劃問(wèn)題分解成橫向和縱向兩個(gè)1維空間的獨(dú)立的軌跡規(guī)劃問(wèn)題, 降低規(guī)劃難度。橫向仍然是SL問(wèn)題,也就是Station Lateral,縱向上也還是ST,也就是Station Time問(wèn)題。
Lattice Planner會(huì)根據(jù)起點(diǎn)和終點(diǎn)的狀態(tài),在位置空間和時(shí)間上同時(shí)進(jìn)行撒點(diǎn)。撒點(diǎn)的起始狀態(tài)和終止?fàn)顟B(tài)各有6個(gè)參數(shù),包括了3個(gè)橫向參數(shù),即橫向位置、橫向位置的導(dǎo)數(shù)也就是Heading、Heading的導(dǎo)數(shù);3個(gè)縱向參數(shù),即縱向位置、縱向位置的一階導(dǎo)數(shù)也就是速度、縱向位置的二階導(dǎo)數(shù)(也就是加速度)。
起點(diǎn)的參數(shù)是車(chē)輛當(dāng)時(shí)真實(shí)的狀態(tài),或者Stitch的狀態(tài)來(lái)進(jìn)行設(shè)計(jì),終止?fàn)顟B(tài)則是撒點(diǎn)枚舉的各個(gè)情況。在確定了終點(diǎn)和起點(diǎn)狀態(tài)以后,再通過(guò)五階或者四階的多項(xiàng)式連接起始狀態(tài)和終止?fàn)顟B(tài),從而得到規(guī)劃的橫向和縱向軌跡。
這個(gè)步驟是Lattice算法的精髓所在,它直接決定了算法的效率以及解空間。舉個(gè)例子來(lái)說(shuō),在撒點(diǎn)的時(shí)候可以的加入車(chē)輛物理動(dòng)力學(xué)性能的約束,同時(shí)根據(jù)障礙物進(jìn)行可行域的預(yù)篩選等,有效的裁剪無(wú)效空間,從而達(dá)到更優(yōu)的性能。
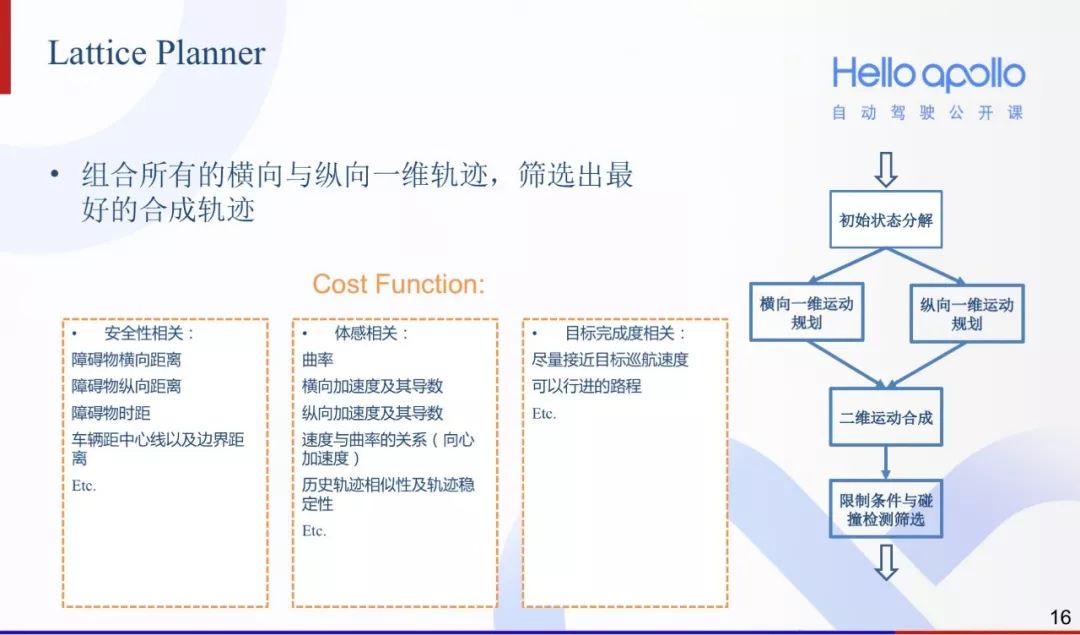
在生成所有橫向和縱向的一維軌跡以后,將其排列組合起來(lái),合成大量的二維軌跡,然后根據(jù)損失函數(shù)篩選出最好的合成軌跡。和EM Planner類(lèi)似,Lattice Planner的損失函數(shù)也可以分為,安全相關(guān)、體感相關(guān)以及目標(biāo)完成度相關(guān)三類(lèi)。
下面來(lái)看一下Lattice Planner在模擬器中的效果。
Lattice Planner在Apollo模擬器Azure中場(chǎng)景通過(guò)率達(dá)到了100%。
丨Planner 對(duì)比
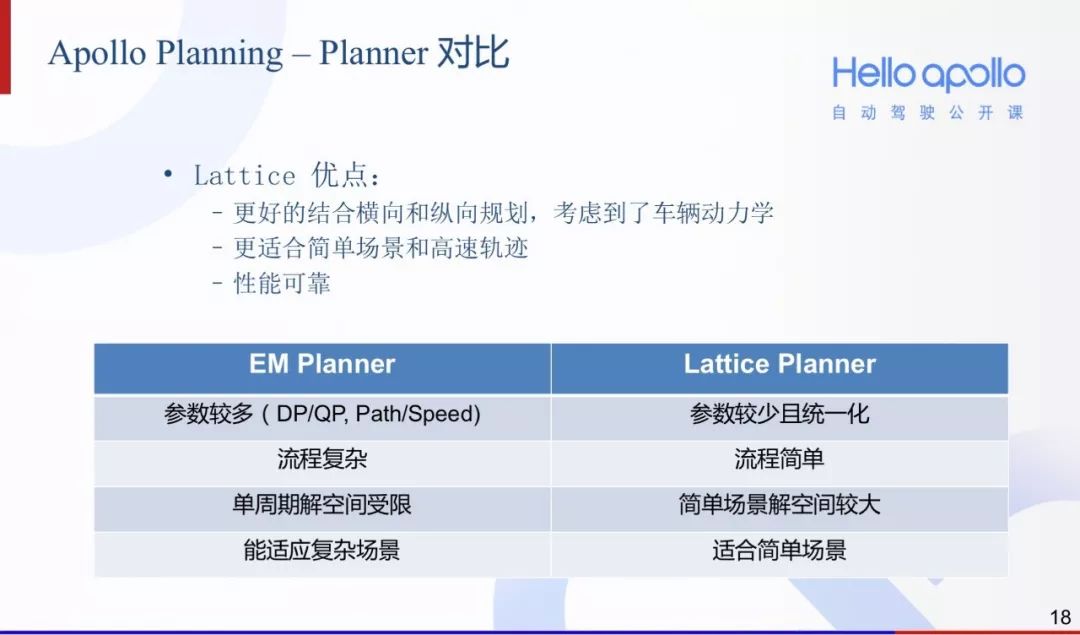
Lattice Planner的優(yōu)點(diǎn)是很明顯的,同時(shí)產(chǎn)生軌跡的幾何形狀與速度分配,直接考慮到車(chē)輛的動(dòng)力學(xué)狀態(tài),尤其是橫向動(dòng)力學(xué)狀態(tài),產(chǎn)生更適合高速運(yùn)動(dòng)的軌跡,簡(jiǎn)單可靠,參數(shù)少于10個(gè)。它利用了撒點(diǎn)算法避免了軌跡陷入局部最優(yōu),性能也非常的優(yōu)秀,生成超過(guò)1000軌跡,軌跡的生成加上選擇,用時(shí)少于100ms,確保了能做到10赫茲的Planning規(guī)劃。
丨Planner 軌跡后處理
在軌跡生成以后,往往還可以通過(guò)一些后處理,對(duì)軌跡進(jìn)行平滑和驗(yàn)證。可以通過(guò)幾何的算法或者更加高粒度的采樣,對(duì)于生成軌跡每個(gè)點(diǎn),進(jìn)行額外的碰撞檢查。也可以同時(shí)驗(yàn)證規(guī)劃的軌跡是否符合車(chē)輛的物理學(xué)動(dòng)力特性,比如看其是否有超過(guò)車(chē)輛加減速度上下界限,以及轉(zhuǎn)彎半徑界限的時(shí)候。
丨回退保障機(jī)制
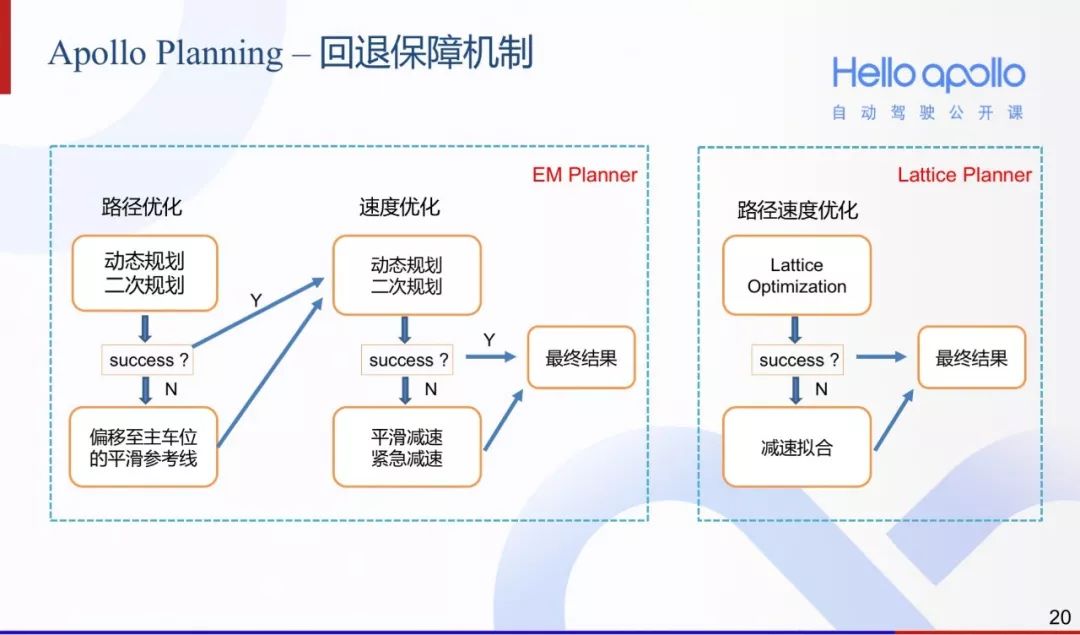
秉著安全第一的原則,Apollo 2.5同時(shí)提供冗余機(jī)制以保證整個(gè)系統(tǒng)的穩(wěn)定性。車(chē)輛在路上行駛的過(guò)程中,遇到的情況千差萬(wàn)別,如果真的遇到了無(wú)論是人工駕駛還是機(jī)器駕駛都無(wú)法解決的特殊惡劣情況,如何保證Planning不會(huì)崩潰,并且輸出一條相對(duì)最安全的軌跡,以保證生命和財(cái)產(chǎn)的安全,就顯得尤其的重要了。
因此,無(wú)論是使用DP還是QP的EM planner,還是同時(shí)進(jìn)行速度和路徑優(yōu)化的Lattice Planner,Apollo 2.5針對(duì)路徑規(guī)劃和速度規(guī)劃都加入了后備規(guī)劃。在正常的邏輯并不能在給定假設(shè)情況下計(jì)算出一條合理的路徑的時(shí)候,針對(duì)當(dāng)時(shí)的情況,對(duì)車(chē)輛進(jìn)行合理的減速最后停車(chē),以確保安全。
丨高效的測(cè)試與迭代
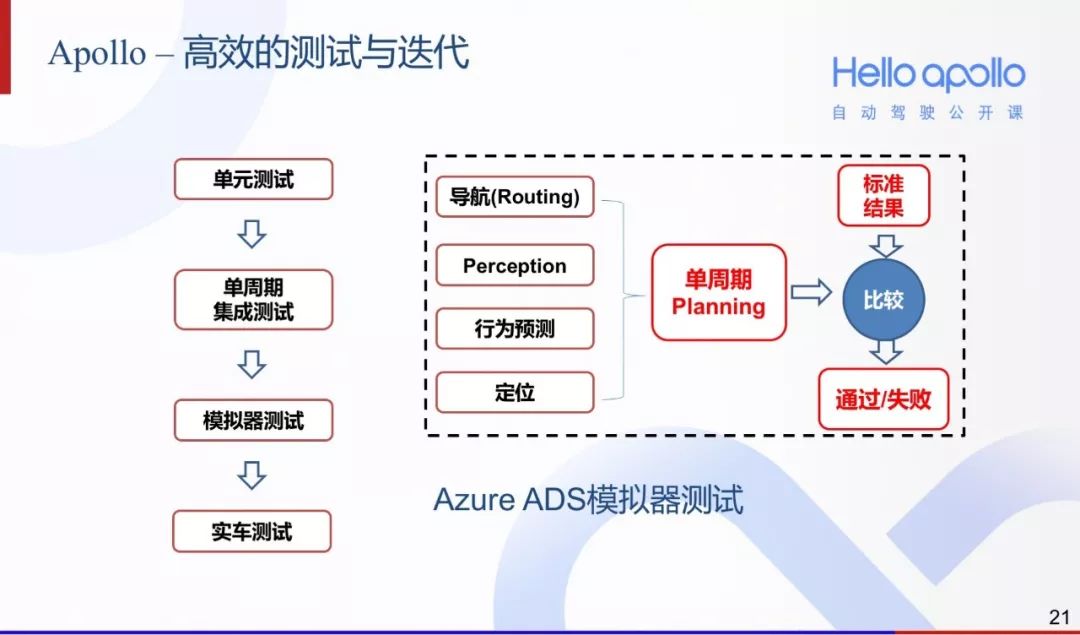
如何幫助大家進(jìn)行能夠高效的迭代也是Apollo所關(guān)心的一個(gè)重要問(wèn)題。因此,Apollo的Planning有一套推薦的測(cè)試迭代流程。即單元測(cè)試,單周期的集成測(cè)試,模擬器測(cè)試,最后再實(shí)車(chē)測(cè)試的流程。讓開(kāi)發(fā)者可以在開(kāi)發(fā)迭代的過(guò)程中,隨時(shí)進(jìn)行回歸,保證開(kāi)發(fā)的質(zhì)量以及效率。
丨坐標(biāo)系
Apollo 2.5又為大家打開(kāi)了另外一扇窗--相對(duì)坐標(biāo)系。此前的絕對(duì)坐標(biāo)系是以世界為背景的一種全局定位,世界上每一個(gè)點(diǎn),都會(huì)有一個(gè)相應(yīng)的唯一的坐標(biāo)。它的好處很明顯,因?yàn)槭侨治ㄒ唬哉f(shuō)表達(dá)一個(gè)物體的真實(shí)位置的時(shí)候非常的容易,做多時(shí)刻位置對(duì)齊的時(shí)候也會(huì)比較的容易。
車(chē)身相對(duì)坐標(biāo)系也是一種常見(jiàn)的坐標(biāo)系,它是以車(chē)輛自身位置坐標(biāo)原點(diǎn),以車(chē)輛的朝向?yàn)閤,車(chē)輛左方為y的坐標(biāo)系。其優(yōu)點(diǎn)也是非常明顯的,可以去除開(kāi)發(fā)者們對(duì)于地圖定位的強(qiáng)依賴(lài),反饋的數(shù)值也更加的直觀方便開(kāi)發(fā)者的理解。
丨相對(duì)坐標(biāo)系
助力于相對(duì)坐標(biāo)系這個(gè)新feature,在Apollo 2.5中同時(shí)推出了L3的高速方案。也就是基于車(chē)道線的感知方案和不基于地圖和定位的規(guī)劃方案。可以理解成為是類(lèi)似于Tesla Autopilot或者M(jìn)obileye的方案,利用相對(duì)坐標(biāo)系下的車(chē)道線代替全局坐標(biāo)系的地圖與定位,進(jìn)行L3級(jí)別的自動(dòng)駕駛功能。
就像John Kennedy說(shuō)的:“We choose to go to the moon in this decade and do the other things,not because they are easy,but because they are hard.”
這是Apollo的口號(hào),也是一直以來(lái)的信念。
-
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13867瀏覽量
166603 -
Apollo
+關(guān)注
關(guān)注
5文章
342瀏覽量
18474
原文標(biāo)題:百度資深架構(gòu)師:Apollo 2.5自動(dòng)駕駛規(guī)劃控制
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車(chē)科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
低成本單片機(jī)方案——觸摸流水燈開(kāi)關(guān)控制

華為成功驗(yàn)證5G高精度低成本定位技術(shù)
低成本解決方案,RK3506的應(yīng)用場(chǎng)景分析!

百度Apollo開(kāi)放平臺(tái)10.0正式發(fā)布
香蕉派開(kāi)源社區(qū)與矽昌通信共推BPI-Wifi5 低成本路由器開(kāi)源方案
使用TPS54308設(shè)計(jì)簡(jiǎn)單且低成本的Flybuck解決方案

具有TPS61085的低成本1W隔離電源解決方案
基于TPS61094的長(zhǎng)壽命、低成本智能電表解決方案
使用TPS62933F設(shè)計(jì)簡(jiǎn)單且低成本的防蠅解決方案
應(yīng)用COT與Flybuck技術(shù)的低成本小功率輔助電源解決方案
CC2340系統(tǒng)降低成本的方案剖析
RISC-V在中國(guó)的發(fā)展機(jī)遇有哪些場(chǎng)景?
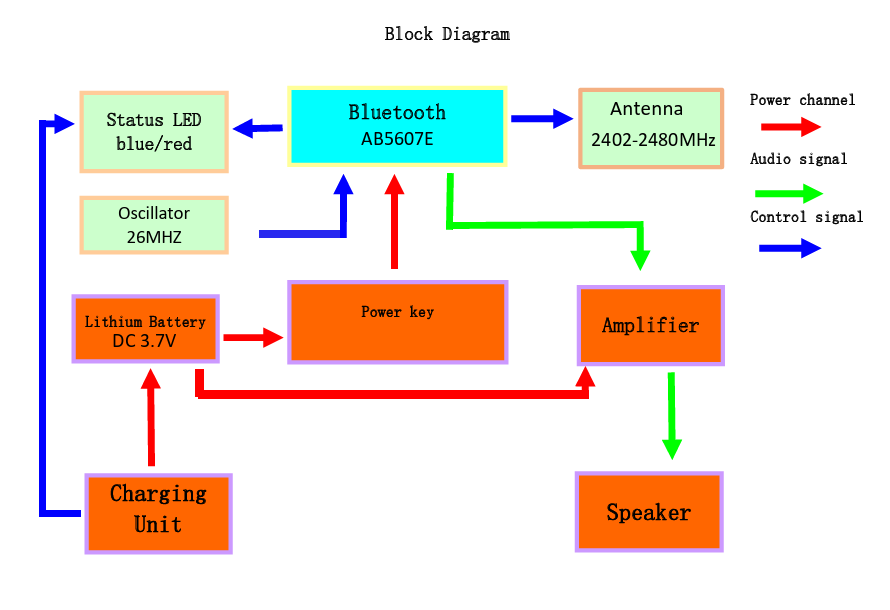
中科藍(lán)訊AB5607E藍(lán)牙5.4 低成本帶插卡帶U盤(pán)音箱方案





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論