 步進電機的控制驅動原理_步進電機的3種勵磁模式詳解
步進電機的控制驅動原理_步進電機的3種勵磁模式詳解
步進電機的基本操作模式稱為“勵磁模式”,能夠使步進電機工作在全步模式、半步模式和微步模式,其中微步模式能夠有效的降低步進電機相電流的噪聲,能夠改善步進電機固有的噪聲震動問題。下面將介紹3種勵磁模式。
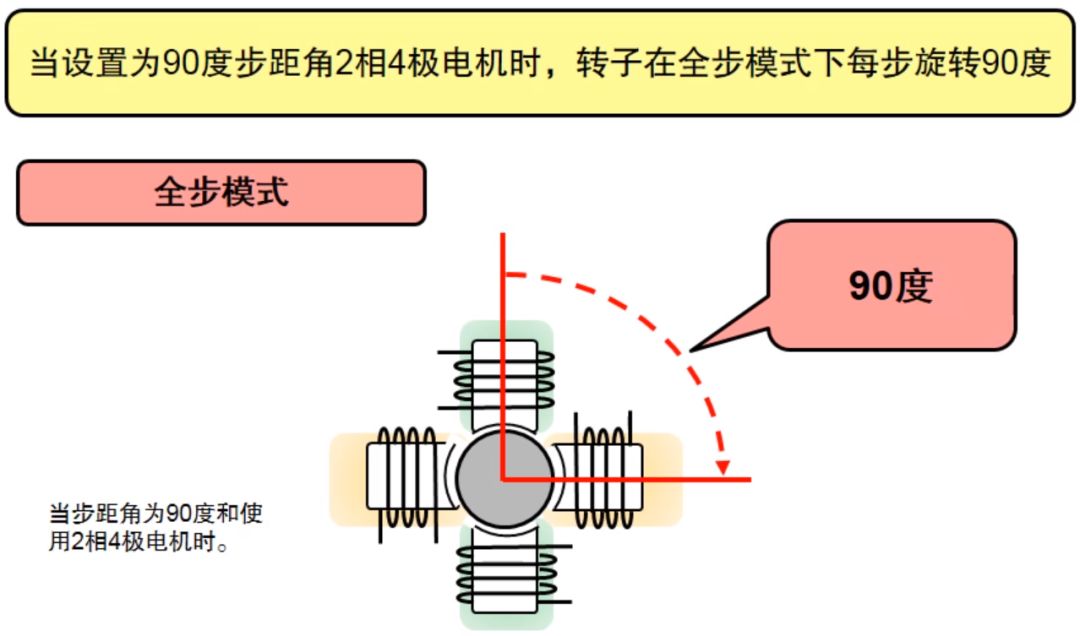
全步模式
所謂全步模式,就是依據電機固有結構設計固定的步距角工作,一個電脈沖,步進電機前進一個步距角。這個步距角使電機設計結構所決定的,也可以理解為電機以最大的步距角旋轉。
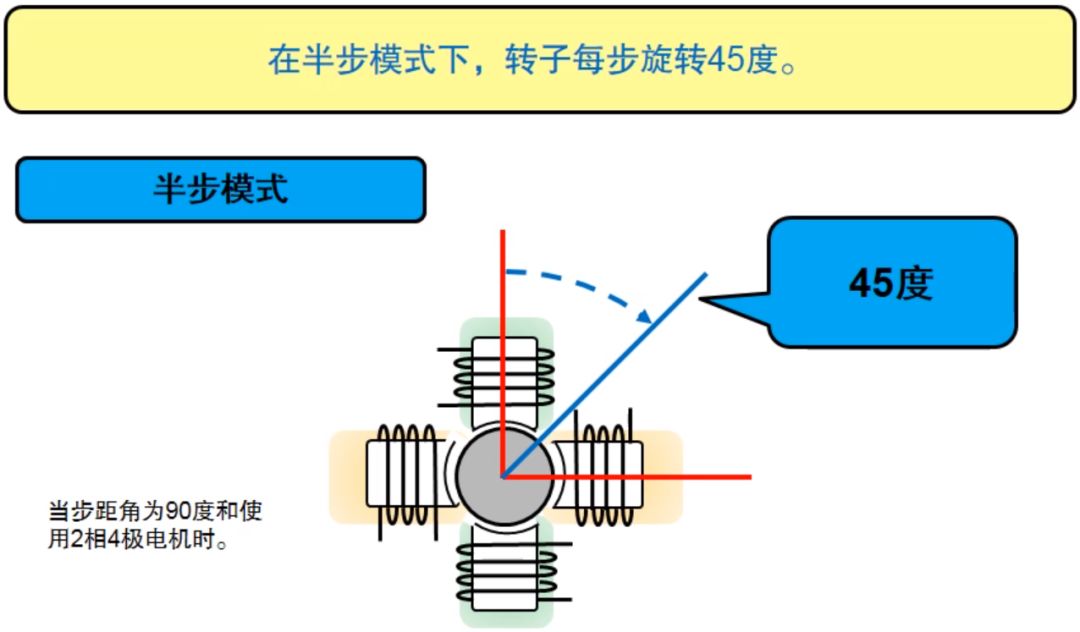
半步模式
半步模式是以電機固有的結構決定的步距角的一半角度進行步進旋轉。如下圖所示,步進電機的總極數是4級,對應的步距角是90度,那么半步模式下,步進電機每個脈沖旋轉45度。
微步模式
微步模式類似于半步模式,步距角更小,就是1/4步、1/8步、1/16步,可以到很高的細分。對應的步進角度就是在整步步距角乘以微步系數。
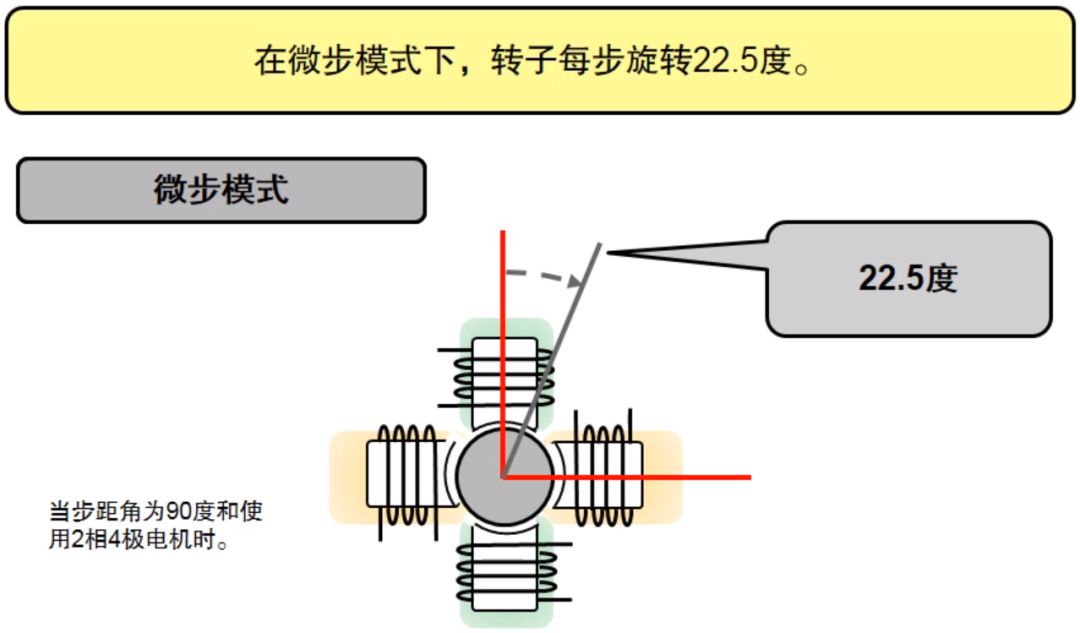
步進電機的步距角越小,需要的加工精度會越高,對應的微步時的步進角度的誤差會越大。
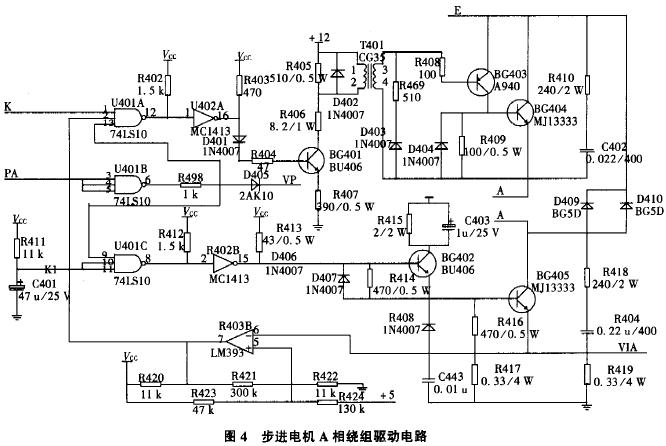
步進電機不能直接接到工頻交流或直流電源上工作,而必須使用專用的步進電機驅動器,它有脈沖發生控制單元、功率驅動單元、保護單元等組成。如下圖所示。
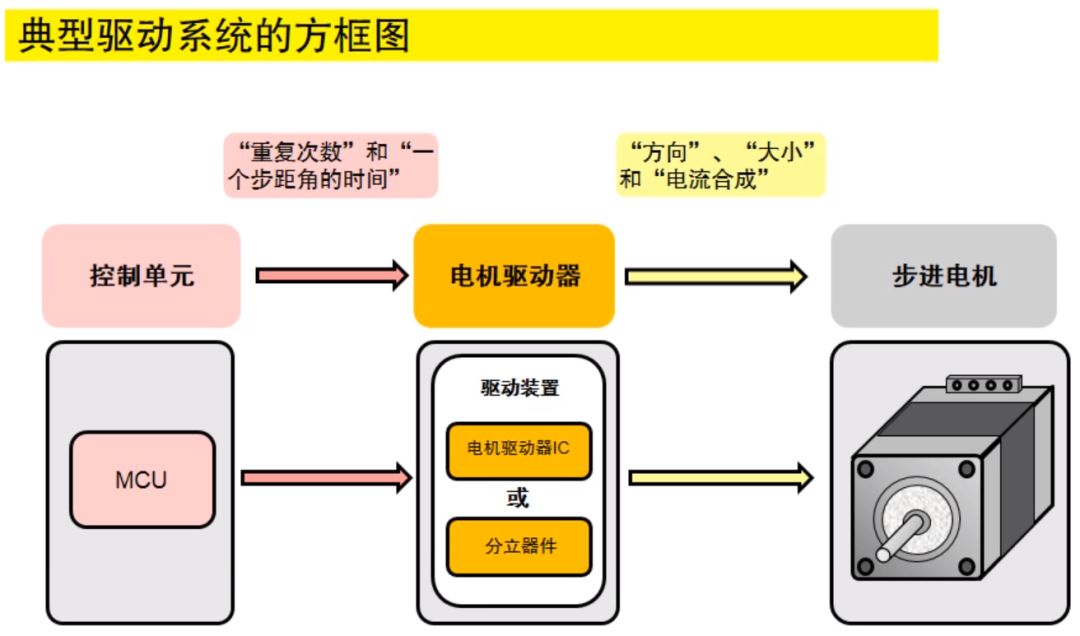
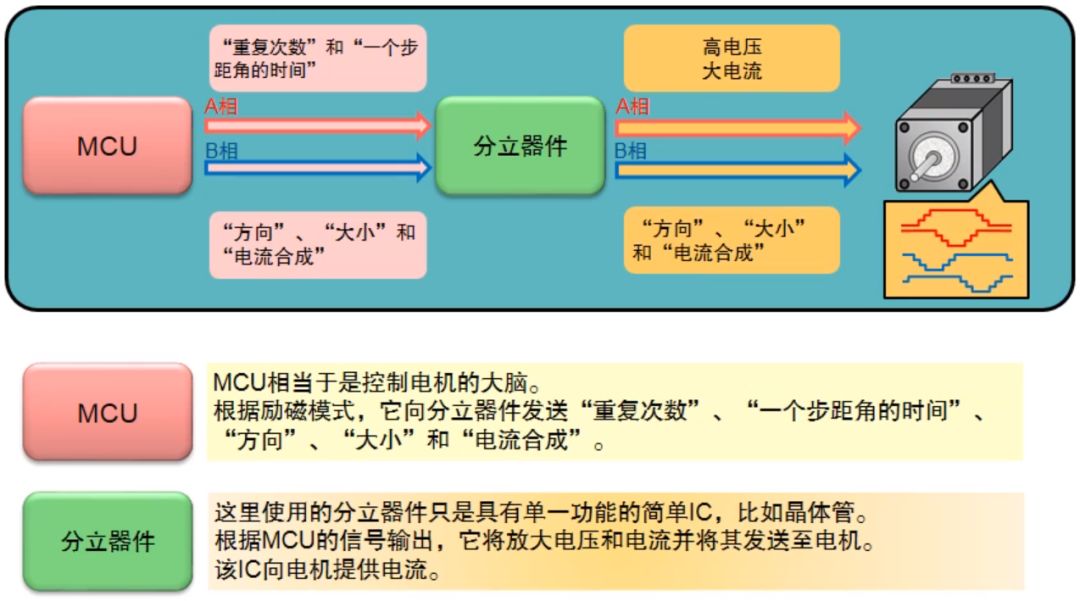
驅動單元與步進電機直接耦合,也可以理解成步進電機微機控制器的功率接口。下面將使用MCU和分離元器件的系統舉例說明。MCU相當于是控制電機的大腦,它向分立器件發送電機的步距角時間、轉動方向和重復次數等,而分立器件根據MCU發出的信號,將放大電壓和電流并將其發送至電機,從而驅動電機轉動。
如上圖所示,該系統使用了MCU和電機控制驅動器IC。從輸入控制信號來區分,步進電機控制器IC可以分為相入力型和時鐘入力型。相入力型是指電機的每個勵磁相的電流方向由輸入信號控制,而時鐘入力型是指電機的驅動由脈沖信號來控制。
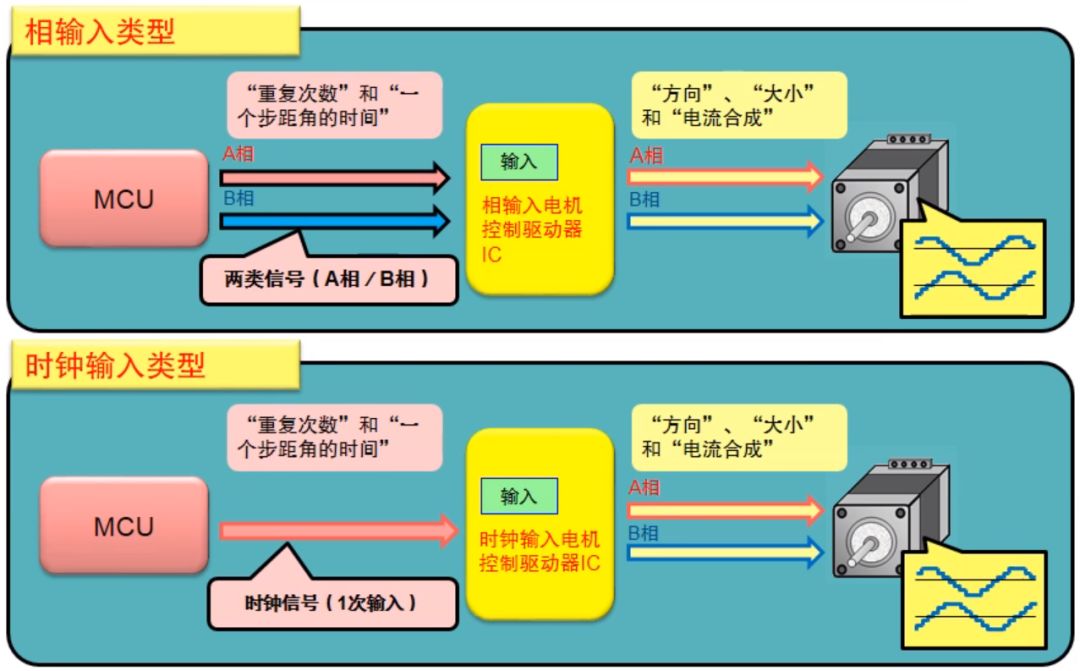
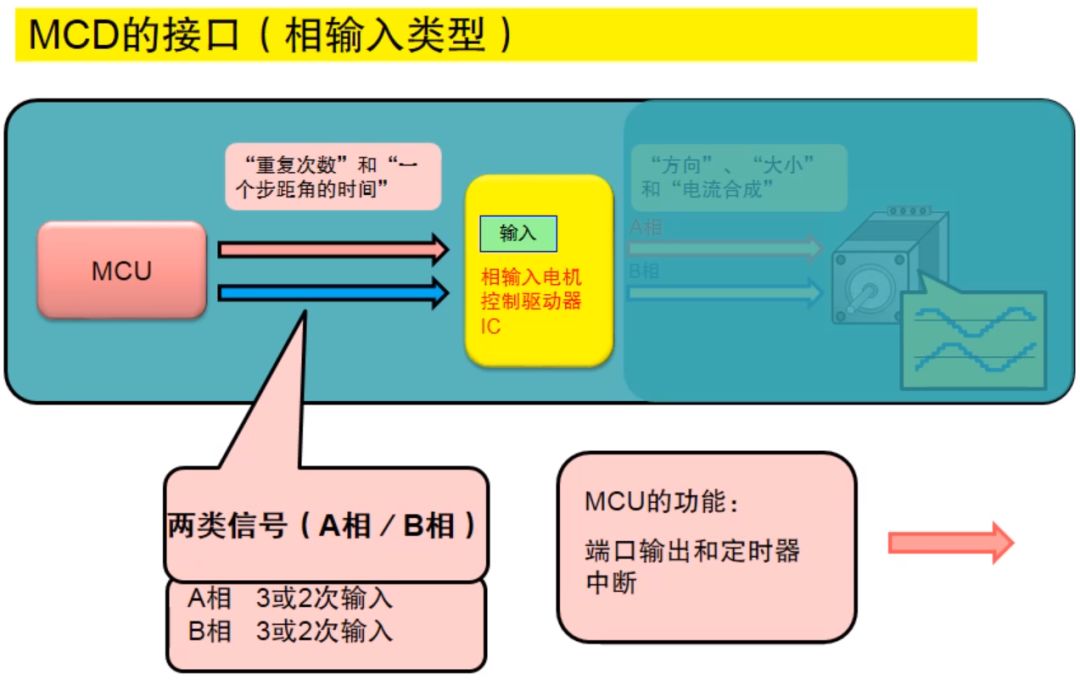
相入力型
相入力型電機驅動器需要A和B兩相的控制信號,只需要時鐘信號,需要控制信號的MCU做更多的運輸工作。
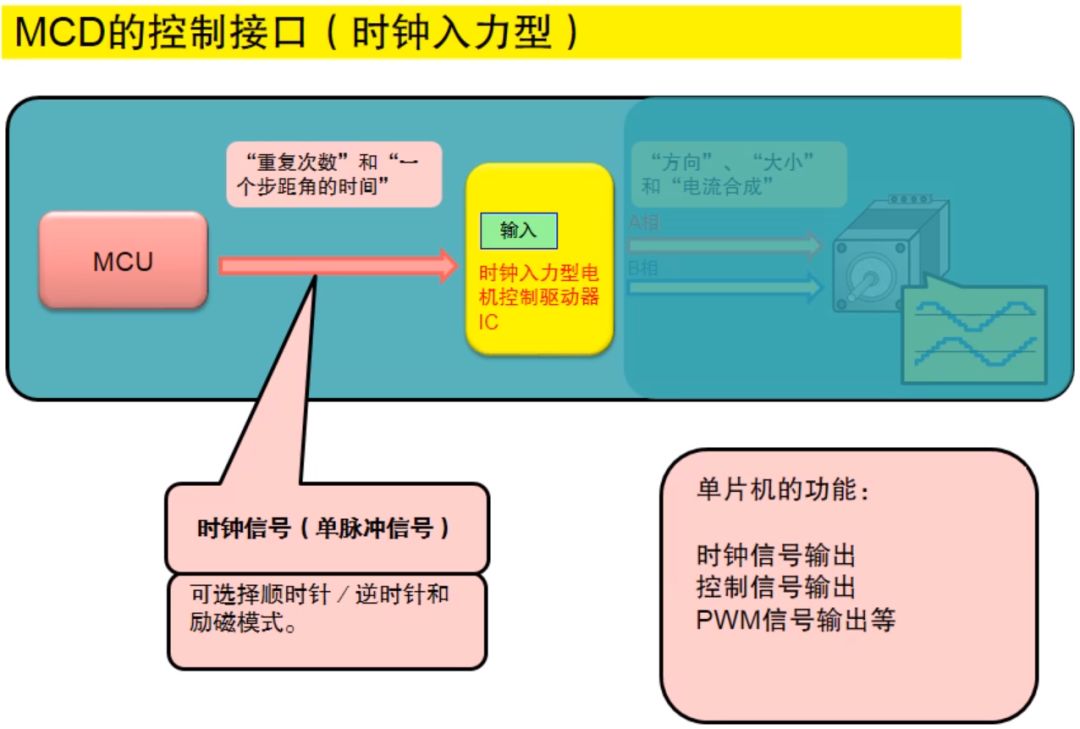
時鐘入力型
時鐘入力型電機驅動器的控制接口,需要時鐘信號(單脈沖信號)輸入,其控制信號相對簡單,MCU的資源占用較少。
電機驅動安全技術
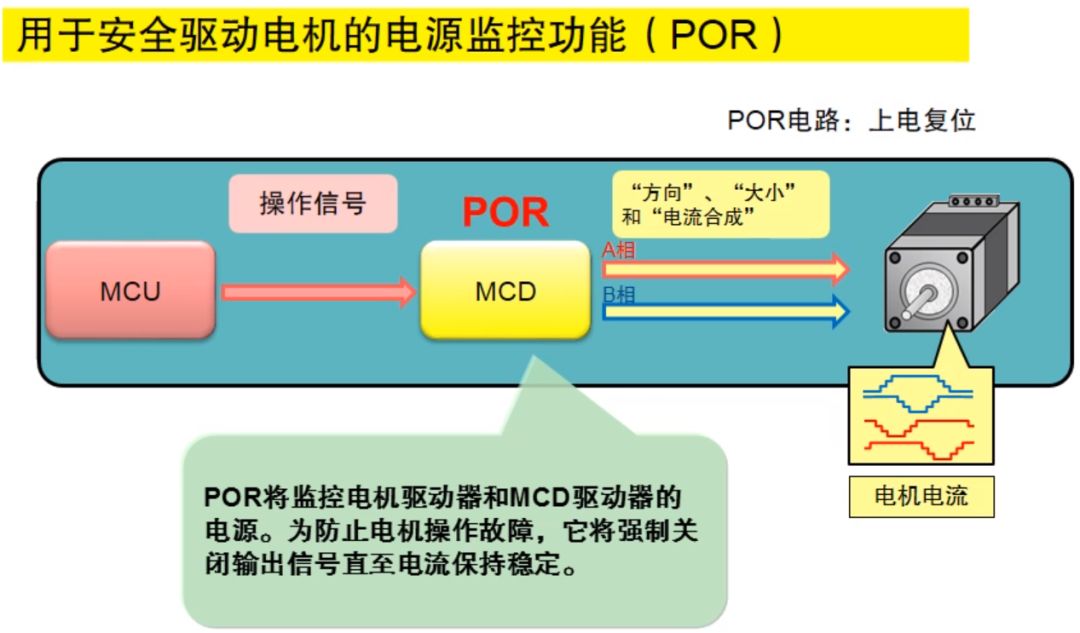
上電復位功能(POR)
上電復位功能將監控電機驅動器,以及電機驅動控制器的電源。為防止電機操作故障,它將強制關閉輸出信號直至供電電壓保持穩定。如下圖所示。
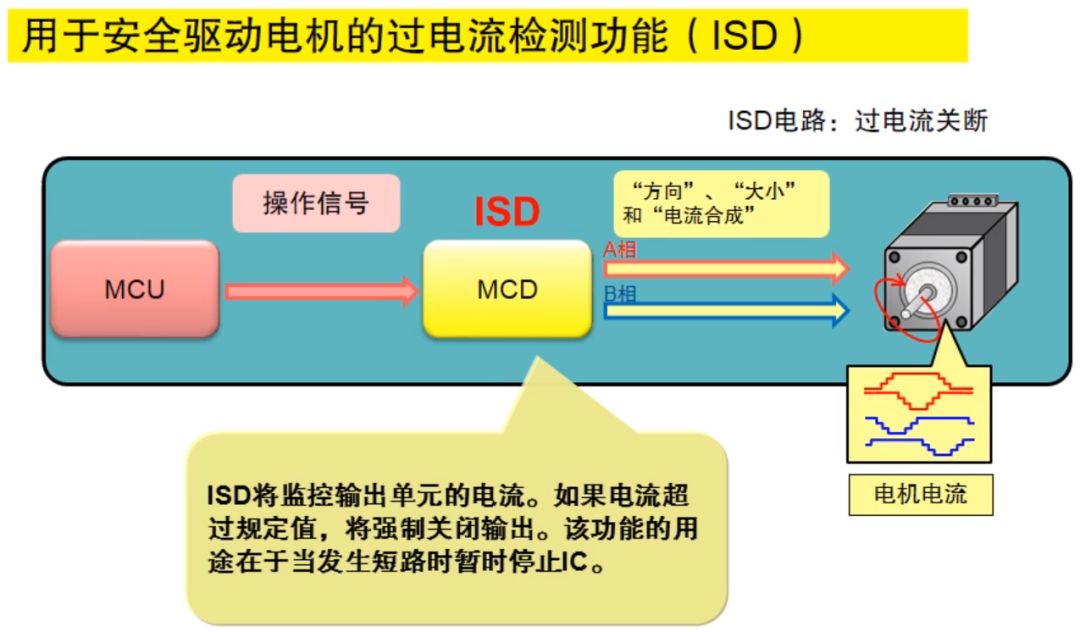
過電流關斷功能將監控輸出單元的電流,如果電流超過規定值,將強制關閉輸出,該功能的用途在于當發生短路時暫時停止IC輸出。如下圖所示。
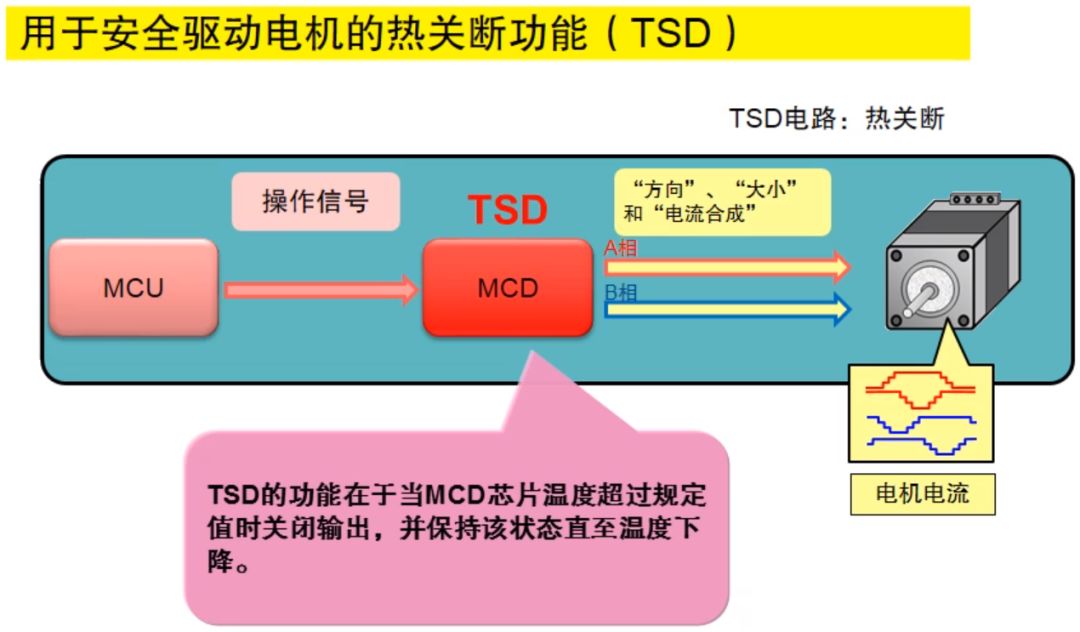
熱關斷功能(TSD)
熱關斷功能在于,當電機控制驅動器芯片溫度超過規定值時關閉輸出,并保持該狀態直至溫度下降。
-
步進電機
+關注
關注
150文章
3110瀏覽量
147484 -
勵磁
+關注
關注
1文章
108瀏覽量
16785
原文標題:步進電機驅動器簡介(下)——步進電機的控制驅動和安全技術
文章出處:【微信號:toshiba_semicon,微信公眾號:東芝半導體】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
步進電機驅動實驗(89C51 + KEIL + Proteus)






 工商網監
工商網監
評論