") 分析車載雷達(dá)通信系統(tǒng)用于自動(dòng)駕駛和智慧交通的應(yīng)用前景和發(fā)展趨勢
分析車載雷達(dá)通信系統(tǒng)用于自動(dòng)駕駛和智慧交通的應(yīng)用前景和發(fā)展趨勢
雷達(dá)通信一體化是同時(shí)具有目標(biāo)探測和信息交互的系統(tǒng),是近年來雷達(dá)和通信技術(shù)研究的一個(gè)重要方向,車載雷達(dá)通信系統(tǒng)是其重要的應(yīng)用之一。本文梳理了外關(guān)于雷達(dá)通信系統(tǒng)研究的文章,介紹了雷達(dá)通信一體化系統(tǒng)的評(píng)價(jià)指標(biāo)、系統(tǒng)構(gòu)成和波形設(shè)計(jì)方案,總結(jié)了系統(tǒng)的雷達(dá)指標(biāo)和通信指標(biāo)的仿真性能研究成果,并分析了車載雷達(dá)通信系統(tǒng)用于自動(dòng)駕駛和智慧交通的應(yīng)用前景和發(fā)展趨勢。
雷達(dá)通信的概念約在 21 世紀(jì)初被提出來 [1-5],雷達(dá)通信一體化概念的提出則是為了適應(yīng)未來高科技戰(zhàn)爭。雷達(dá)系統(tǒng)和通信系統(tǒng)作為電子戰(zhàn)平臺(tái)的基本組成部分,在軍事方面的作用至關(guān)重要。長期以來,這些系統(tǒng)都是各自縱向發(fā)展,但隨著技術(shù)的進(jìn)步,各系統(tǒng)間的差距逐漸減少,于是系統(tǒng)間的橫向一體化發(fā)展問題開始受到關(guān)注,即從橫向上對(duì)現(xiàn)有系統(tǒng)進(jìn)行融合,使其具備通用性和多功能性。如果能實(shí)現(xiàn)雷達(dá)通信一體化,不僅能夠減少電子戰(zhàn)平臺(tái)的體積和電磁干擾,更可以提升戰(zhàn)場指揮效率。
雖然雷達(dá)系統(tǒng)和通信系統(tǒng)由于用途的不同在工作方式、功能實(shí)現(xiàn)和信號(hào)特征等方面都存在顯著差異,但從系統(tǒng)原理來看,雷達(dá)技術(shù)和通信技術(shù)都與電磁波在空間的發(fā)射和接收有關(guān)。從系統(tǒng)結(jié)構(gòu)來看,兩者的硬件系統(tǒng)都包括天線、發(fā)射機(jī)、接收機(jī)和信號(hào)處理器等模塊;從技術(shù)的發(fā)展趨勢來看,雷達(dá)由傳統(tǒng)硬件器件實(shí)現(xiàn)的功能正在由數(shù)字信號(hào)處理來取代完成。同時(shí),通信系統(tǒng)的載頻也轉(zhuǎn)移到微波領(lǐng)域,與傳統(tǒng)雷達(dá)使用的頻率處于同一數(shù)量級(jí)。因此,雷達(dá)系統(tǒng)和通信系統(tǒng)從硬件結(jié)構(gòu)實(shí)現(xiàn)到軟件算法處理都正在趨同。
雷達(dá)系統(tǒng)和通信系統(tǒng)的一體化首先是以共用相同的硬件平臺(tái)為基礎(chǔ)。最簡單的是時(shí)分共享的方式,利用選通開關(guān),雷達(dá)系統(tǒng)和通信系統(tǒng)分時(shí)復(fù)用天線、發(fā)射機(jī)和接收機(jī)等硬件平臺(tái),但是這種方式下兩個(gè)系統(tǒng)都不可能連續(xù)長時(shí)間地占用資源,否則就會(huì)影響另一個(gè)系統(tǒng)的性能;而本系統(tǒng)也由于工作時(shí)間有限而使得系統(tǒng)性能受限。
另一種硬件平臺(tái)共享的方式主要用于相控陣?yán)走_(dá),將二維陣列分成多個(gè)子陣,每個(gè)子陣獨(dú)立工作,用于實(shí)現(xiàn)雷達(dá)或通信功能,但是由于子陣的功率受限,雷達(dá)和通信系統(tǒng)的性能都會(huì)受到影響。因此,這種硬件共享、獨(dú)立實(shí)現(xiàn)雷達(dá)和通信功能的一體化技術(shù)由于資源受限不僅對(duì)系統(tǒng)性能有影響,而且限制了系統(tǒng)效率的提升。因此,近年來雷達(dá)通信一體化的研究開始關(guān)注信號(hào)方面的融合,即在同一硬件平臺(tái)上利用同一信號(hào)實(shí)現(xiàn)雷達(dá)和通信功能。
車載雷達(dá)通信系統(tǒng)利用車輛已經(jīng)裝載的毫米波雷達(dá)以及雷達(dá)通信一體化技術(shù),不僅可以實(shí)現(xiàn)車載雷達(dá)探測和車間通信功能,而且不會(huì)額外增加汽車的硬件模塊,也不會(huì)因?yàn)橥ㄐ殴δ艿囊攵沟闷嚨碾姶怒h(huán)境更加復(fù)雜,既降低成本又可以提高頻譜利用率。因此,車載雷達(dá)通信系統(tǒng)將會(huì)成為雷達(dá)通信一體化技術(shù)從軍事應(yīng)用轉(zhuǎn)向民用領(lǐng)域的重要突破之一。
1. 車載雷達(dá)通信系統(tǒng)的研究意義
車載雷達(dá)通信系統(tǒng)正面對(duì)巨大的市場機(jī)遇。一方面,各國政府對(duì)交通安全的重視升級(jí),自動(dòng)緊急剎車、前向碰撞告警、車道偏離告警等汽車安全技術(shù)不斷被納入相關(guān)的法律法規(guī)。另一方面,自動(dòng)駕駛成為全球研究的熱點(diǎn),更在「中國制造 2025」中上升為國家戰(zhàn)略之一。
目前業(yè)界采用的高級(jí)駕駛輔助系統(tǒng)僅依靠搭載的攝像頭、紅外、激光雷達(dá)等各種車載傳感器來為單車智能駕駛提供輔助。而與高級(jí)駕駛輔助系統(tǒng)相比,車載雷達(dá)通信系統(tǒng)是在車載毫米波雷達(dá)系統(tǒng)上一體化實(shí)現(xiàn)現(xiàn)代通信技術(shù),在實(shí)現(xiàn)雷達(dá)探測功能的同時(shí)建立車聯(lián)網(wǎng)的通信連接,使汽車同時(shí)具備復(fù)雜環(huán)境感知、信息共享、智能化決策等功能,為智能駕駛提供最有效的保障。
車載雷達(dá)通信系統(tǒng)不僅具有毫米波雷達(dá)的探測優(yōu)勢,即在車輛對(duì)周圍環(huán)境感知的功能上具有全天候、全天時(shí)、高精度、高分辨率的特點(diǎn),而且可以通過車載雷達(dá)通信系統(tǒng)建立的車聯(lián)網(wǎng)實(shí)現(xiàn)車輛自身及其周圍環(huán)境信息的傳遞與共享,車輛可以獲得超視距范圍的環(huán)境認(rèn)知,從而使車輛具有了「視覺+聽覺」的能力。因此,車載雷達(dá)通信系統(tǒng)是支持智能駕駛和智慧交通最基礎(chǔ)、最有效的手段。
并且,隨著 5G 通信時(shí)代的來臨,通信的頻段已不限制于 6 GHz 以下,而是擴(kuò)展到十幾吉赫茲到幾十吉赫茲的微波波段。而車載雷達(dá)通信系統(tǒng)可使用全球統(tǒng)一的頻譜,即 24 GHz、77 GHz、79 GHz 頻段。這些頻段與 5G 高頻通信頻段和微波通信頻段接近。因此,基于雷達(dá)技術(shù)和通信技術(shù)的同源性,通過研究車載雷達(dá)通信系統(tǒng),不僅使得車-車間通過車載雷達(dá)建立車車通信聯(lián)網(wǎng)成為可能,而且可對(duì) 5G 高頻通信技術(shù)的研究提供技術(shù)積累。
2. 車載雷達(dá)通信系統(tǒng)的研究現(xiàn)狀
2.1 雷達(dá)通信一體化的評(píng)價(jià)指標(biāo)
雷達(dá)通信一體化的評(píng)價(jià)指標(biāo)包括雷達(dá)指標(biāo)和通信指標(biāo)。通常雷達(dá)指標(biāo)主要涉及雷達(dá)對(duì)目標(biāo)的距離、速度、角度等各方面的測量要求,主要包括測量范圍、測量精度、分辨率等指標(biāo)。通信指標(biāo)主要為信噪比、數(shù)據(jù)速率等,且通信功能的引入不能降低雷達(dá)的探測性能。
以下主要介紹雷達(dá)指標(biāo)。
2.1.1 距離
(1)雷達(dá)作用距離
雷達(dá)的作用距離可由雷達(dá)方程來得出,雷達(dá)方程將雷達(dá)的作用距離和雷達(dá)發(fā)射、接收、天線和環(huán)境等各因素聯(lián)系起來,可以反映雷達(dá)各參數(shù)對(duì)雷達(dá)作用距離的影響程度。基本雷達(dá)方程為:

其中,R_max是雷達(dá)的最大作用距離,P_t是雷達(dá)發(fā)射功率,G_t和G_r分別是發(fā)射天線和接收天線的增益,σ是雷達(dá)截面積,S_sim是雷達(dá)接收機(jī)最小可檢測信號(hào)功率。
(2)測距范圍
測距范圍包括最小可測距離和最大單值測距范圍。
最小可測距離是指雷達(dá)能測量的最近目標(biāo)距離。對(duì)于脈沖雷達(dá)來說,收發(fā)天線是共用的,在發(fā)射脈沖寬度 τ 的時(shí)間內(nèi),接收機(jī)無法接收目標(biāo)回波,在發(fā)射脈沖結(jié)束后將天線收發(fā)開關(guān)轉(zhuǎn)換到接收狀態(tài)也需要一定的時(shí)間 t_0,接收機(jī)也不能接收目標(biāo)回波。因此,雷達(dá)的最小可測距離為:

雷達(dá)的最大單值測距范圍由脈沖重復(fù)周期T_m決定。為保證單值測距,通常應(yīng)選取T_m ≥ 2R_max/c,其中R_max是被測目標(biāo)的最大作用距離。當(dāng)雷達(dá)重復(fù)頻率不能滿足單值測距的要求時(shí),將產(chǎn)生距離模糊。
(3)距離分辨率
距離分辨率通常是指同一方向上兩個(gè)大小相同的點(diǎn)目標(biāo)之間的最小可區(qū)分距離。對(duì)于簡單的脈沖雷達(dá)信號(hào),脈沖越窄,距離分辨力越好。對(duì)于復(fù)雜的脈沖壓縮信號(hào),決定距離分辨率的是雷達(dá)信號(hào)的有效帶寬B,有效帶寬越寬,距離分辨率越好。距離分辨率可表示為:
(4)測距精度
測距精度是指雷達(dá)對(duì)被測目標(biāo)距離測量的準(zhǔn)確度,一般用均方根誤差來表示。理論上,單個(gè)強(qiáng)散射點(diǎn)距離的最小均方根誤差可以表示為:

其中,E/N_0為信噪比。可以看出:雷達(dá)的測距精度與信號(hào)帶寬和信噪比成反比。
2.1.2 速度
根據(jù)多普勒頻率,其中 v_r 為徑向速度,測速精度可以表示為:
速度分辨率為:
其中,τ 是信號(hào)持續(xù)時(shí)間,正比于信號(hào)時(shí)寬。可以看出:測速精度和速度分辨率都與信號(hào)時(shí)寬成反比,且信號(hào)波長越短,測速精度和速度分辨率越高。
2.1.3 角度
角度的測量與天線孔徑有關(guān),若天線的半功率波束寬度為:

則方位角或俯仰角的測量精度可以表示為:

2.2 雷達(dá)通信一體化系統(tǒng)的波形設(shè)計(jì)
雷達(dá)通信一體化系統(tǒng)最大的挑戰(zhàn)就是找到合適的信號(hào)能同時(shí)完成信息的傳遞和雷達(dá)探測功能。雷達(dá)和通信的參數(shù)都跟信道特性有關(guān),最主要的信道特性是多普勒頻率和最大多徑時(shí)延,并且由于回波經(jīng)歷了二倍的傳播路徑,因此這些特性對(duì)雷達(dá)的影響更大。除了信道的物理特性外,還有一些只針對(duì)雷達(dá)性能的限制,主要跟雷達(dá)的模糊函數(shù)有關(guān)。
傳統(tǒng)雷達(dá)波形設(shè)計(jì)的目的是得到具有最優(yōu)自相關(guān)特性的波形來保證雷達(dá)探測性能。雷達(dá)波形的選擇要考慮 3 個(gè)性能因素:目標(biāo)距離、多普勒和方位角。對(duì)于車載雷達(dá)來說,在交通密集的區(qū)域,波形應(yīng)能有效地對(duì)抗干擾和噪聲。而通信的主要性能指標(biāo)包括:覆蓋范圍、時(shí)延、數(shù)據(jù)速率、系統(tǒng)容量等。通信波形的選擇是要保證能對(duì)抗各種信道衰落以及多用戶干擾從而正確的解調(diào)解碼出通信信息。
考慮到現(xiàn)有雷達(dá)的實(shí)現(xiàn)技術(shù)和現(xiàn)有的通信技術(shù),車載雷達(dá)通信一體化信號(hào)的主要研究方向有:基于線性調(diào)頻的雷達(dá)通信 [4]、基于擴(kuò)頻的雷達(dá)通信 [6-9]、基于 OFDM 的雷達(dá)通信 [10-11]。當(dāng)然,這些技術(shù)還可進(jìn)一步與多天線 [7]、波束賦形等技術(shù)結(jié)合起來。
2.3 基于線性調(diào)頻的雷達(dá)通信
基于線性調(diào)頻的雷達(dá)通信主要分為 2 類:基于準(zhǔn)正交波形疊加的方案 [4-5] 和基于單一波形的方案 [11-13]。在單一波形方案中,又可分成 2 類:基于波形分離方案 [9,14] 和基于分?jǐn)?shù)階傅里葉變換的方案 [6]。
2.3.1 基于準(zhǔn)正交波形疊加的方案
在基于準(zhǔn)正交波形疊加的方案 [4-5] 中,雷達(dá)信號(hào)和通信信號(hào)使用相互「正交」的波形,例如:雷達(dá)探測可以使用 Down-Chirp 信號(hào)(頻率隨時(shí)間線性下降),通信數(shù)據(jù)可以使用 Up-Chirp 信號(hào)(頻率隨時(shí)間線性上升),并使用 2 個(gè)「正交」的匹配濾波器分別提取期望的信號(hào)。用戶之間的數(shù)據(jù)可以通過不同的調(diào)頻斜率、不同的發(fā)射時(shí)間、不同的起始頻率等來區(qū)分。此方案中,雷達(dá)信號(hào)為:

通信信號(hào)為:

雷達(dá)信號(hào)和通信信號(hào)在一個(gè)雷達(dá)脈沖內(nèi)是基本正交的。

圖 1 基于準(zhǔn)正交波形疊加的方案的示意圖
(DQPSK:四相相對(duì)相移鍵控)
基于準(zhǔn)正交波形疊加的方案的示意圖如圖 1 所示。
2.3.2 基于波形分離方案

圖 2 基于波形分離的方案的示意圖
基于波形分離方案的示意圖如圖 2 所示[13]。在發(fā)射端,編碼后的通信信息調(diào)制到雷達(dá)波形上發(fā)射。在接收端,通過分離器將雷達(dá)信號(hào)和通信信號(hào)進(jìn)行分離之后再分別進(jìn)行處理。分離的方法包括同態(tài)濾波、白化等。
2.3.3 基于分?jǐn)?shù)階傅里葉變換的方案
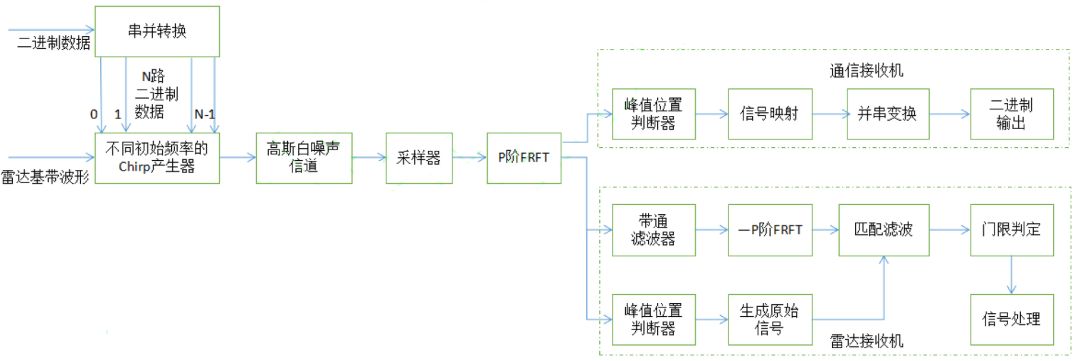
圖 3 基于分?jǐn)?shù)階傅里葉變換的方案的示意圖
(FRFT:分?jǐn)?shù)傅里葉變換)
基于分?jǐn)?shù)階傅里葉變換(FRFT)方案的示意圖如圖 3 所示 [11]。雷達(dá)信號(hào)和通信信號(hào)是同一個(gè),通信數(shù)據(jù)調(diào)制在不同的初始頻率的 Chirp 信號(hào)上,接收端使用分?jǐn)?shù)階傅里葉變換分別把通信數(shù)據(jù)和雷達(dá)信號(hào)提取出來。
2.3.4 基于擴(kuò)頻的雷達(dá)通信
為了獲得較好的通信性能,可以考慮使用具有良好自相關(guān)特性的擴(kuò)頻信號(hào)來作為雷達(dá)通信一體化的信號(hào)。系統(tǒng)只發(fā)射一個(gè)擴(kuò)頻信號(hào),一方面,系統(tǒng)利用自己發(fā)射的信號(hào)回波進(jìn)行目標(biāo)探測,實(shí)現(xiàn)雷達(dá)功能;另一方面系統(tǒng)通過該發(fā)射信號(hào)給另外的系統(tǒng)發(fā)射通信數(shù)據(jù)。用戶之間的數(shù)據(jù)通過不同的擴(kuò)頻碼來區(qū)分。
一個(gè)雷達(dá)接收到的信號(hào) [7] 為:

用本地碼與接收到的雷達(dá)信號(hào)做相關(guān)之后得到:

在對(duì)公式進(jìn)行簡化之后,當(dāng)τ = 2R/c_0 - (k-i)T時(shí),可得到相關(guān)峰值。此時(shí),k = i + 2R/(c_0*T),進(jìn)而知道了目標(biāo)的距離、使用的擴(kuò)頻碼,可以進(jìn)一步解調(diào)出數(shù)據(jù),并得到目標(biāo)速度(從碼相位推出)。
2.3.5 基于 OFDM 的雷達(dá)通信
OFDM 信號(hào) [10] 也是目前雷達(dá)通信一體化系統(tǒng)波形設(shè)計(jì)的研究內(nèi)容之一。OFDM 信號(hào)作為雷達(dá)信號(hào),具有圖釘狀的模糊函數(shù),同時(shí)具有距離和多普勒的高分辨率,而沒有距離——多普勒耦合問題,可以獨(dú)立地處理距離和多普勒信息。
但 OFDM 信號(hào)對(duì)多普勒頻移更加敏感,會(huì)破壞回波子載波之間的正交性,從而需要頻偏估計(jì)與補(bǔ)償。另外,OFDM 信號(hào)具有較高的峰值平均功率比(PAPR),如果要獲得較高的發(fā)射功率,則要盡量降低信號(hào)的 PAPR 并采用大動(dòng)態(tài)范圍的線性放大器。

圖 4 基于 OFDM 方案的示意圖
(FFT:快速離散傅里葉變換;IFFT:離散傅里葉逆變換)
基于 OFDM 信號(hào)的雷達(dá)通信示意如圖 4 所示[10]。雷達(dá)信號(hào)和通信信號(hào)是同一個(gè),一個(gè)雷達(dá)收到的自己的回波為 [7]:

用其跟本地發(fā)射的信號(hào)相除,然后經(jīng)過一系列離散傅里葉逆變換(IDFT)/離散傅里葉變換(DFT)運(yùn)算之后,即可得到距離(R)和速度(f_D)。
其他雷達(dá)收到上述信號(hào)后,進(jìn)行快速傅里葉變換(FFT)運(yùn)算、解調(diào)、解碼之后即可得到通信數(shù)據(jù)。
2.4 仿真/測試結(jié)果
目前,雷達(dá)通信一體化信號(hào)的研究主要集中在調(diào)頻連續(xù)波、擴(kuò)頻信號(hào)、正交頻分復(fù)用技術(shù)(OFDM)信號(hào)這 3 種類型,相關(guān)的研究和仿真也多是基于這 3 種類型。
2.4.1 雷達(dá)性能
2.4.1.1 線性調(diào)頻方案的仿真/測試結(jié)果
文獻(xiàn) [4] 中,作者使用了 Up-Chirp 信號(hào)(雷達(dá))和 Down-Chirp 信號(hào)(通信)(它們基本正交),Chirp 信號(hào)的調(diào)頻率為 40 MHz/μs,系統(tǒng)帶寬為 80 MHz,脈沖時(shí)間為 2 μs(頻率從最低到最高所需要的時(shí)間),處理增益(時(shí)寬帶寬積)為 22 dB,數(shù)據(jù)調(diào)制方式是π/4-DQPSK;射頻頻率為 10 GHz。
從文獻(xiàn) [4] 中的仿真結(jié)果可知:當(dāng)信號(hào)與干擾加噪聲比(SINR)超過 15 dB 時(shí),檢測概率可達(dá)到 85%(或更高),從而可以檢測出大多數(shù)目標(biāo)。
文獻(xiàn) [5] 中,作者使用了 Up-Chirp 信號(hào)(雷達(dá))和 Down-Chirp 信號(hào)(通信)(它們基本正交),Chirp 信號(hào)的調(diào)頻率為 1 GHz/μs,載波頻率為 750 MHz,系統(tǒng)帶寬為 500 MHz,脈沖時(shí)間為 0.5 μs(頻率從最低到最高所需要的時(shí)間),處理增益(時(shí)寬帶寬積)為 24 dB;數(shù)據(jù)調(diào)制方式是二進(jìn)制相移鍵控(BPSK),射頻頻率為 75 MHz,發(fā)射功率為 27 dBm。
從文獻(xiàn) [5] 的測試結(jié)果可知:其雷達(dá)通信系統(tǒng)能可靠地區(qū)分出 10 m 之外的 2 個(gè)相隔 63 cm 的目標(biāo)。另外,文獻(xiàn) [5] 還提到,其目標(biāo)檢測概率為 99%。
2.4.1.2 直接序列擴(kuò)頻方案的仿真/測試結(jié)果
文獻(xiàn) [11] 中,作者使用的仿真設(shè)置為:使用 m 序列來擴(kuò)頻(SF=15,31,63,127,255);碼片速率為 48 MCps;信號(hào)帶寬為 96 MHz;數(shù)據(jù)長度為 256 個(gè)符號(hào),數(shù)據(jù)調(diào)制方式為 BPSK。從文獻(xiàn)[11]的仿真結(jié)果可知:當(dāng) SINR 超過 0 dB 時(shí),峰值旁瓣(PSL)(SF=255)達(dá)到 40 dB,從而能有效地區(qū)分出 2 個(gè)不同的目標(biāo)。
2.4.1.3 OFDM 方案的仿真/測試結(jié)果
文獻(xiàn)[7]中,作者使用的仿真設(shè)置為:載波頻率為 5.9 GHz,全相位 OFDM 子載波個(gè)數(shù)為 512,CP 長度為 1.4 μs,加入 CP 后的全相位 OFDM 符號(hào)長度為 23.8 μs,系統(tǒng)帶寬為 91.5 MHz,一幀內(nèi)的全相位 OFDM 符號(hào)個(gè)數(shù)為 177,一幀的時(shí)間長度為4.25 ms,子載波間隔為180 kHz。從文獻(xiàn)[7]的仿真結(jié)果可知:當(dāng) SINR 超過 0 dB 時(shí),距離的均方誤差(MSE)幾乎接近于 0,從而能有效地區(qū)分出 2 個(gè)不同的目標(biāo);當(dāng) SINR 超過 0 dB 時(shí),Doppler 頻移的 MSE 約為 100 Hz(等價(jià)于 5 m/s,18 km/h),從而能有效地區(qū)分出 2 個(gè)不同的運(yùn)動(dòng)速度。
從上面的仿真結(jié)果可以看出:3 種雷達(dá)通信的方案能有效地檢測出目標(biāo)。
2.4.2 通信性能
2.4.2.1 線性調(diào)頻方案的仿真/測試結(jié)果
文獻(xiàn)[4]中,作者使用了 Up-Chirp 信號(hào)(雷達(dá))和 Down-Chirp 信號(hào)(通信)(它們基本正交),Chirp 信號(hào)的調(diào)頻率為 40 MHz/μs,系統(tǒng)帶寬為 80 MHz,脈沖時(shí)間為 2 μs(頻率從最低到最高所需要的時(shí)間),處理增益(時(shí)寬帶寬積)為 22 dB,數(shù)據(jù)調(diào)制方式是π/4-DQPSK;射頻頻率為 10 GHz。
從文獻(xiàn)[4]的仿真結(jié)果可知:當(dāng) SINR 超過 11 dB 時(shí),誤碼率(BER) 低于 0.1%,從而可以滿足一般的通信性能需求。
2.4.2.2 直接序列擴(kuò)頻方案的仿真/測試結(jié)果
文獻(xiàn) [7] 中,作者使用的仿真設(shè)置如下:載波頻率為 2 MHz,采樣頻率為 20 MHz,使用 m 序列來擴(kuò)頻,擴(kuò)頻因子為 15 或 31,碼片寬度為 1 μs,數(shù)據(jù)調(diào)制方式為差分相干二進(jìn)制相移鍵控(DBPSK),數(shù)據(jù)長度為 2000 個(gè)符號(hào)。
從文獻(xiàn) [7] 的仿真結(jié)果可知:當(dāng) SINR 超過 3 dB 時(shí),BER(SF=15 的)低于 0.1%,從而可以滿足一般的通信性能需求。
2.4.2.3 OFDM 方案的仿/測試真結(jié)果
文獻(xiàn) [10] 中,作者使用的仿真設(shè)置如下:載波頻率為 5.9 GHz,全相位 OFDM 子載波個(gè)數(shù)為 512,CP 長度為 1.4 μs,加入 CP 后的全相位 OFDM 符號(hào)長度為 23.8 μs,系統(tǒng)帶寬為 91.5MHz,一幀內(nèi)的全相位 OFDM 符號(hào)個(gè)數(shù)為 177,一幀的時(shí)間長度為 4.25 ms,子載波間隔為180 kHz。
從文獻(xiàn) [10] 中的仿真結(jié)果可知:當(dāng) SINR 超過 8.2 dB 時(shí),BER 低于 0.1%,從而可以滿足一般的通信性能需求。
從上面的仿真結(jié)果可以看出:3 種雷達(dá)通信的方案在不太高的 SINR 下能較好地傳輸數(shù)據(jù)。
2.5 試驗(yàn)/測試系統(tǒng)
2.5.1 基于線性調(diào)頻的雷達(dá)通信試驗(yàn)系統(tǒng)

圖 5 基于線性調(diào)頻的雷達(dá)通信實(shí)驗(yàn)系統(tǒng)
(LHCP:左旋圓偏振;PRBS:偽隨機(jī)二進(jìn)制序列;RHCP:右旋圓偏振)
如圖 5 所示 [5]:該系統(tǒng)的工作頻率為 750 MHz,帶寬為 500 MHz,距離分辨率為 63 cm,雷達(dá)檢測概率為 99%,虛警為 7%。在 1 Mbit/s 速率下的 BER 為 0.002(這時(shí)雷達(dá)脈沖重復(fù)頻率為 150 kHz,雷達(dá)脈沖時(shí)間寬度 1.5 ns)。
2.5.2 基于直接序列擴(kuò)頻的雷達(dá)通信測試系統(tǒng)
圖 6 基于直接序列擴(kuò)頻的雷達(dá)通信測試系統(tǒng)(信號(hào)處理板卡)
圖 6 為(南京理工大學(xué))基于直接序列擴(kuò)頻的雷達(dá)通信測試系統(tǒng)(信號(hào)處理板卡),由現(xiàn)場可編程門陣列(FPGA)、模數(shù)轉(zhuǎn)換(A/D)、數(shù)模轉(zhuǎn)換(D/A)等組成 [8]。該系統(tǒng)使用 30 MHz中頻、31 位 m 序列擴(kuò)頻,通信速率為 129 kbit/s,PSL 為 13 dB。
2.5.3 基于 OFDM 的雷達(dá)通信試驗(yàn)系統(tǒng)
圖 7 OFDM 超寬帶合成孔徑雷達(dá)試驗(yàn)系統(tǒng)
美國邁阿密大學(xué)研制了超寬帶合成孔徑雷達(dá),并使其成為通信雷達(dá)一體化系統(tǒng),圖 7 為他們?cè)趯?shí)驗(yàn)室研制的 OFDM 超寬帶合成孔徑雷達(dá)試驗(yàn)系統(tǒng) [15-16]。
2.6 小結(jié)
從以上的仿真和試驗(yàn)系統(tǒng)可以看出:車載雷達(dá)通信系統(tǒng)可以使用多種信號(hào)來實(shí)現(xiàn),最簡單的是使用目前最常用的雷達(dá)信號(hào)——調(diào)頻連續(xù)波(FMCW),通信信息直接調(diào)制在該信號(hào)上,也可以使用現(xiàn)有的通信信號(hào),比如擴(kuò)頻信號(hào)和 OFDM 信號(hào)。根據(jù)仿真驗(yàn)證:
24 GHz 車載雷達(dá)通信系統(tǒng)的雷達(dá)作用距離可達(dá) 100 m,通信距離則在 500 m 以上,數(shù)據(jù)的傳輸速率最高可達(dá) 20 Mbit/s(采用 OFDM 信號(hào));
使用 77 GHz 車載雷達(dá)通信系統(tǒng)的話,雷達(dá)的測距范圍和有效的通信距離基本相當(dāng),可達(dá) 250 m,峰值數(shù)據(jù)速率為 20 Mbit/s(采用 OFDM 信號(hào)),而距離和速度的分辨率和精度都遠(yuǎn)高于 24 GHz 系統(tǒng)。
其中,距離分辨率可小于 1 m,測速范圍可達(dá) ±200 km/h。至于時(shí)延指標(biāo),除了傳播時(shí)延和系統(tǒng)處理時(shí)延外再無其他網(wǎng)絡(luò)時(shí)延,可以滿足汽車安全的時(shí)延要求 [17-19]。
因此,從仿真驗(yàn)證的結(jié)果來看,車載雷達(dá)通信系統(tǒng)完全可以在不損失雷達(dá)性能的條件下實(shí)現(xiàn)車聯(lián)網(wǎng)通信,不僅可以為車輛提供駕駛輔助的各項(xiàng)功能,而且獲得更遠(yuǎn)視角的道路信息,滿足智能駕駛對(duì)傳感器感知信息和網(wǎng)聯(lián)信息融合的需求。
3. 結(jié)束語
在技術(shù)創(chuàng)新的驅(qū)動(dòng)下,通信、互聯(lián)網(wǎng)與各行業(yè)的融合發(fā)展日新月異,萬物互聯(lián)的時(shí)代已經(jīng)開啟,不僅包括人與人、人與物之間的聯(lián)接,也包括物與物之間的聯(lián)接,車聯(lián)網(wǎng)就是其中重要的組成部分。
而對(duì)于汽車產(chǎn)業(yè),伴隨著人們對(duì)汽車駕駛的舒適度、安全性等用戶需求的提升,自動(dòng)駕駛成為人們追求的炙手可熱的目標(biāo)之一。目前自動(dòng)駕駛產(chǎn)業(yè)整體水平處于 Level 1/Level 2(根據(jù)美國 NTHSA 或 SAE 標(biāo)準(zhǔn))或駕駛輔助(根據(jù)中國 SAE 標(biāo)準(zhǔn))水平,中國的先進(jìn)駕駛輔助的各主要功能的新車滲透率除了車身電子穩(wěn)定系統(tǒng)之外都不足 10%。
根據(jù)中國汽車工程學(xué)會(huì)發(fā)布的信息,中國到 2020 年將推進(jìn)以自主環(huán)境感知為主、網(wǎng)聯(lián)信息服務(wù)為輔的部分自動(dòng)駕駛的應(yīng)用,到 2025 年重點(diǎn)形成網(wǎng)聯(lián)式環(huán)境感知能力并實(shí)現(xiàn)復(fù)雜工況下的高度自動(dòng)駕駛,到 2030 年通過 V2X 協(xié)同控制實(shí)現(xiàn)完全自動(dòng)駕駛。
因此,如何從目前低滲透率的駕駛輔助階段快速有效地推進(jìn)到具有自主環(huán)境感知能力和網(wǎng)聯(lián)功能的自動(dòng)駕駛階段成為關(guān)鍵問題。通過車載雷達(dá)通信系統(tǒng),車輛不僅可以通過自身雷達(dá)探測功能感知周圍環(huán)境,更可以在車輛之間建立通信網(wǎng)絡(luò),通過協(xié)作式的通信獲得更廣范圍的區(qū)域信息。遠(yuǎn)近信息的融合不僅為車輛自身的安全駕駛提供有力的保障,更可以實(shí)現(xiàn)全道路的智能駕駛和整體交通效率的提升。
因此,車載雷達(dá)通信系統(tǒng)將會(huì)成為自動(dòng)駕駛產(chǎn)業(yè)最核心的傳感器之一,加速智能網(wǎng)聯(lián)汽車的產(chǎn)業(yè)化進(jìn)程,進(jìn)而提升自動(dòng)駕駛產(chǎn)業(yè)的整體水平。
-
車載雷達(dá)
+關(guān)注
關(guān)注
0文章
36瀏覽量
13549 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13812瀏覽量
166457 -
智慧交通
+關(guān)注
關(guān)注
5文章
706瀏覽量
26927
原文標(biāo)題:車載雷達(dá)通信系統(tǒng)綜述
文章出處:【微信號(hào):IV_Technology,微信公眾號(hào):智車科技】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
FPGA在自動(dòng)駕駛領(lǐng)域有哪些應(yīng)用?
自動(dòng)駕駛真的會(huì)來嗎?
自動(dòng)駕駛的到來
淺析自動(dòng)駕駛發(fā)展趨勢,激光雷達(dá)是未來?
AI/自動(dòng)駕駛領(lǐng)域的巔峰會(huì)議—國際AI自動(dòng)駕駛高峰論壇
邁向自動(dòng)駕駛和電動(dòng)汽車之路研討會(huì)
中國自動(dòng)駕駛行業(yè)前景看好,國產(chǎn)技術(shù)迅速發(fā)展
如何讓自動(dòng)駕駛更加安全?
2020中國上海國際自動(dòng)駕駛技術(shù)展覽會(huì)
ADAS視覺傳感技術(shù),為朝向自動(dòng)駕駛趨勢發(fā)展做好準(zhǔn)備
網(wǎng)聯(lián)化自動(dòng)駕駛的含義及發(fā)展方向
自動(dòng)駕駛系統(tǒng)設(shè)計(jì)及應(yīng)用的相關(guān)資料分享
自動(dòng)駕駛技術(shù)的實(shí)現(xiàn)
自動(dòng)駕駛技術(shù)的優(yōu)勢及發(fā)展趨勢

自動(dòng)駕駛汽車技術(shù) | 車載雷達(dá)系統(tǒng)






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論