") 詳細(xì)了解毫米波雷達(dá)概念以及原理和產(chǎn)業(yè)研究
詳細(xì)了解毫米波雷達(dá)概念以及原理和產(chǎn)業(yè)研究
毫米波雷達(dá)作為唯一可以“全天候全天時(shí)”工作的傳感器,是實(shí)現(xiàn)汽車ADAS以及自動(dòng)駕駛不可或缺的核心傳感器之一!下面詳細(xì)了解一下:
●●●毫米波雷達(dá)概念以及原理:
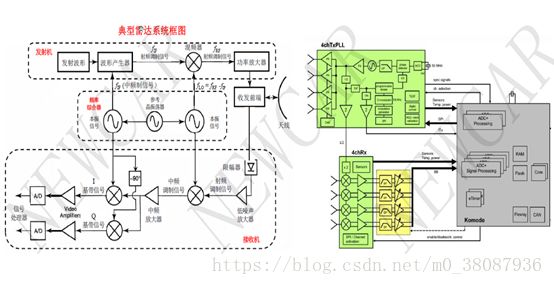
雷達(dá)(Radar,radio detecting and ranging),無線電探測(cè)和測(cè)距。雷達(dá)的基本任務(wù)是發(fā)射電磁波對(duì)目標(biāo)進(jìn)行照射并接收其回波,由此獲得目標(biāo)至電磁波發(fā)射點(diǎn)的探測(cè)感興趣的距離、方向、速度等狀態(tài)參數(shù)。按輻射種類可分為:脈沖雷達(dá)和連續(xù)波雷達(dá)(FMCW)。
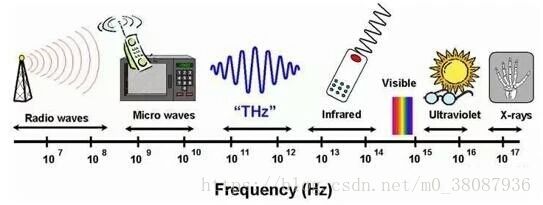
毫米波雷達(dá),顧名思義,就是工作在毫米波頻段的雷達(dá)。毫米波(Millimeter-Wave,縮寫:MMW),是指長(zhǎng)度在1~10mm的電磁波,對(duì)應(yīng)的頻率范圍為30~300GHz。如下圖,毫米波位于微波與遠(yuǎn)紅外波相交疊的波長(zhǎng)范圍,所以毫米波兼有這兩種波譜的優(yōu)點(diǎn),同時(shí)也有自己獨(dú)特的性質(zhì)。毫米波的理論和技術(shù)分別是微波向高頻的延伸和光波向低頻的發(fā)展。
根據(jù)波的傳播理論,頻率越高,波長(zhǎng)越短,分辨率越高,穿透能力越強(qiáng),但在傳播過程的損耗也越大,傳輸距離越短;相對(duì)地,頻率越低,波長(zhǎng)越長(zhǎng),繞射能力越強(qiáng),傳輸距離越遠(yuǎn)。所以與微波相比,毫米波的分辨率高、指向性好、抗干擾能力強(qiáng)和探測(cè)性能好。與紅外相比,毫米波的大氣衰減小、對(duì)煙霧灰塵具有更好的穿透性、受天氣影響小。這些特質(zhì)決定了毫米波雷達(dá)具有全天時(shí)全天候的工作能力。
●●●毫米波雷達(dá)檢測(cè)原理:
毫米波雷達(dá)最重要的任務(wù)就是用無線電的方法發(fā)現(xiàn)目標(biāo)并檢測(cè)與目標(biāo)物體的距離、速度和方向。
毫米波雷達(dá)測(cè)距原理很簡(jiǎn)單,就是把無線電波(毫米波)發(fā)出去,然后接收回波,根據(jù)收發(fā)的時(shí)間差測(cè)得目標(biāo)的位置數(shù)據(jù)和相對(duì)距離。根據(jù)電磁波的傳播速度,可以確定目標(biāo)的距離公式為:s=ct/2,其中s為目標(biāo)距離,t為電磁波從雷達(dá)發(fā)射出去到接收到目標(biāo)回波的時(shí)間,c為光速。毫米波雷達(dá)測(cè)速是基于多普勒效應(yīng)(Doppler Effect)原理。所謂多普勒效應(yīng)就是,當(dāng)聲音、光和無線電波等振動(dòng)源與觀測(cè)者以相對(duì)速度v運(yùn)動(dòng)時(shí),觀測(cè)者所收到的振動(dòng)頻率與振動(dòng)源所發(fā)出的頻率有不同。因?yàn)檫@一現(xiàn)象是奧地利科學(xué)家多普勒最早發(fā)現(xiàn)的,所以稱之為多普勒效應(yīng)。也就是說,當(dāng)發(fā)射的電磁波和被探測(cè)目標(biāo)有相對(duì)移動(dòng),回波的頻率會(huì)和發(fā)射波的頻率不同。當(dāng)目標(biāo)向雷達(dá)天線靠近時(shí),反射信號(hào)頻率將高于發(fā)射信號(hào)頻率;反之,當(dāng)目標(biāo)遠(yuǎn)離天線而去時(shí),反射信號(hào)頻率將低于發(fā)射信號(hào)頻率,如下圖。由多普勒效應(yīng)所形成的頻率變化叫做多普勒頻移,它與相對(duì)速度v成正比,與振動(dòng)的頻率成反比。如此,通過檢測(cè)這個(gè)頻率差,可以測(cè)得目標(biāo)相對(duì)于雷達(dá)的移動(dòng)速度,也就是目標(biāo)與雷達(dá)的相對(duì)速度。根據(jù)發(fā)射脈沖和接收的時(shí)間差,可以測(cè)出目標(biāo)的距離。
●●●毫米波雷達(dá)的產(chǎn)業(yè)研究:
2017年中國毫米波雷達(dá)市場(chǎng)規(guī)模約為13.4億元,到2021年預(yù)計(jì)能達(dá)到96.7億元,2016-2021年均增長(zhǎng)率約為70.6%。
2017年以來,激光雷達(dá)獲得資本市場(chǎng)追捧。但從當(dāng)前的市場(chǎng)來看,毫米波雷達(dá)才是增長(zhǎng)最快的市場(chǎng),2018年1-5月,中國乘用車車載毫米波雷達(dá)的前裝市場(chǎng)裝車量為140.6萬顆,同比大增112.7%。
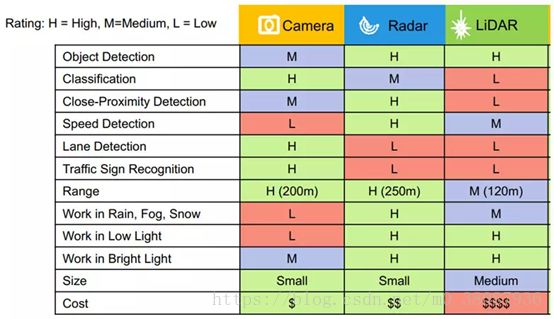
從下圖的三大傳感器對(duì)比來看,目前毫米波雷達(dá)的綜合表現(xiàn)強(qiáng)于激光雷達(dá)。
毫米波雷達(dá)市場(chǎng)繼續(xù)細(xì)分下去,24GHz毫米波雷達(dá)目前仍是出貨量最大的類型。早期24GHz毫米波雷達(dá)主要用于中短距探測(cè),77GHz毫米波雷達(dá)主要用于長(zhǎng)距探測(cè),隨著技術(shù)進(jìn)步與成本下降,加上性能優(yōu)勢(shì),77GHz雷達(dá)有逐漸替代24GHz雷達(dá)的趨勢(shì),2017年用于LCA/RCTA的77GHz雷達(dá)出貨量顯著上升。
從總量上看,一方面目前側(cè)邊SRR 24GHz仍是主流,前視LRR部分主機(jī)廠如奔馳、PSA也使用24GHz雷達(dá),短期內(nèi)24GHz雷達(dá)增長(zhǎng)依然可觀;另一方面全球主流供應(yīng)商如博世和大陸的下一代產(chǎn)品主要采用76-77GHz頻段,預(yù)計(jì)到2020年左右,77GHz雷達(dá)市場(chǎng)規(guī)模將實(shí)現(xiàn)反超。
毫米波雷達(dá)市場(chǎng)仍是博世、大陸、海拉等傳統(tǒng)TIER1掌控市場(chǎng)主要份額。國內(nèi)毫米波雷達(dá)廠商從后裝市場(chǎng)起步,然后通過國內(nèi)車企,逐步進(jìn)入前裝市場(chǎng)。
木牛科技在后裝市場(chǎng)已經(jīng)獲得數(shù)萬臺(tái)訂單。森思泰克24Ghz側(cè)后向雷達(dá)已經(jīng)拿到自主品牌長(zhǎng)豐獵豹的前裝訂單,到2019年預(yù)計(jì)有十余款新上市車型搭載森思泰克的毫米波雷達(dá)。
激光雷達(dá)成為國內(nèi)外自動(dòng)駕駛領(lǐng)域的創(chuàng)新熱點(diǎn),傳統(tǒng)汽車巨頭和初創(chuàng)企業(yè)都在該領(lǐng)域加大投入,投資并購頻繁。技術(shù)方面,機(jī)械式多線激光雷達(dá)已經(jīng)大量應(yīng)用于無人駕駛原型車,但固態(tài)激光雷達(dá)更符合汽車量產(chǎn)需求,代表了未來發(fā)展方向。
目前,激光雷達(dá)仍存在技術(shù)路線不確定、價(jià)格高、難以滿足車規(guī)級(jí)要求等問題。同時(shí),下一代高精度成像毫米波雷達(dá)也在走向成熟,未來將與激光雷達(dá)形成一定競(jìng)爭(zhēng)。
不過,激光雷達(dá)的技術(shù)進(jìn)步神速,激光雷達(dá)廠商的信心越來越足。Quanergy聯(lián)合創(chuàng)始人兼CEO Louay Eldada年初表示,2018年Quanergy將利用合作伙伴 Sensata 在江蘇常州的工廠生產(chǎn)激光雷達(dá),預(yù)計(jì)初期年產(chǎn)能為1000萬臺(tái),后期隨著市場(chǎng)需求的提升,該工廠產(chǎn)能有望逐步擴(kuò)充至數(shù)億臺(tái)。
除了Quanery,速騰聚創(chuàng)、北科天繪、鐳神智能、禾賽科技等國內(nèi)激光雷達(dá)廠商也建立了自己的工廠,并在不斷擴(kuò)充產(chǎn)能。激光雷達(dá)市場(chǎng)預(yù)計(jì)在2021年啟動(dòng)大規(guī)模增長(zhǎng)。
毫米波雷達(dá)、激光雷達(dá)和攝像頭在尺寸、價(jià)格、適應(yīng)場(chǎng)景、成像、測(cè)距、定位、物體識(shí)別等方面各有優(yōu)劣,無論哪種單一傳感器都無法獨(dú)立支撐起未來自動(dòng)駕駛汽車對(duì)外部環(huán)境感知的要求。雷達(dá)和攝像頭的融合可以獲得更為精確的環(huán)境數(shù)據(jù)、提升冗余,最大限度確保ADAS和自動(dòng)駕駛系統(tǒng)的穩(wěn)定性和安全性。
●●●毫米波雷達(dá)在ADAS中的應(yīng)用:
對(duì)于車輛安全來說,最主要的判斷依據(jù)就是兩車之間的相對(duì)距離和相對(duì)速度信息,特別車輛在高速行駛中,如果兩車的距離過近,是容易導(dǎo)致追尾事故。憑借出色的測(cè)距測(cè)速能力,毫米波雷達(dá)被廣泛地應(yīng)用在自適應(yīng)巡航控制(ACC)、前向防撞報(bào)警(FCW)、盲點(diǎn)檢測(cè)(BSD)、輔助停車(PA)、輔助變道(LCA)等汽車ADAS中。
通常,為了滿足不同距離范圍的探測(cè)需要,一輛汽車上會(huì)安裝多顆短程、中程和長(zhǎng)程毫米波雷達(dá)。其中24GHz雷達(dá)系統(tǒng)主要實(shí)現(xiàn)近距離探測(cè)(SRR,60米以下),77GHz雷達(dá)系統(tǒng)主要實(shí)現(xiàn)中、長(zhǎng)距離的探測(cè)(MRR,100米左右;LRR,200米以上)。不同的毫米波雷達(dá)“各司其職”,在車輛前方、車身和后方發(fā)揮不同的作用。

根據(jù)波的傳播理論,頻率越高,波長(zhǎng)越短,分辨率越高,探測(cè)距離越遠(yuǎn),但探測(cè)角度(水平視場(chǎng))會(huì)變小。所以77GHz毫米波雷達(dá)較24GHz可以實(shí)現(xiàn)更遠(yuǎn)的探測(cè)距離,精度更高,不過隨著頻率的增加相應(yīng)的芯片的設(shè)計(jì)和制造難度也變大,77GHz毫米波雷達(dá)成本更高。通常探測(cè)角度和探測(cè)距離是矛盾的。如圖1,顯示了大陸集團(tuán)77GHz ARS 310型毫米波雷達(dá)在短、中、長(zhǎng)程不同探測(cè)距離和探測(cè)角度的比較。所以雖然說77GHz功能上可以取代24GHz,是未來主流,但從性價(jià)比的角度來看,目前短程雷達(dá)還主要由24GHz承擔(dān)。
上圖為大陸集團(tuán)ARS 310型的短程、中程、長(zhǎng)程雷達(dá)檢測(cè)范圍。想要完全實(shí)現(xiàn)ADAS各項(xiàng)功能,全方位覆蓋汽車周圍環(huán)境的感測(cè),兼顧性能和成本,一輛汽車上會(huì)安裝多顆短程、中程和長(zhǎng)程毫米波雷達(dá)。不同的毫米波雷達(dá)“各司其職”,在車輛前方、車身和后方發(fā)揮不同的作用。目前主要的標(biāo)配:1-2顆77GHz MRR/LRR+4顆24GHz SRR。24GHz SRR雖然探測(cè)距離相對(duì)較短,但優(yōu)勢(shì)在于探測(cè)角度較大,成本相對(duì)較低,可以配置多顆實(shí)現(xiàn)車身近距離全方位覆蓋。MRR/LRR功能相當(dāng),LRR的優(yōu)勢(shì)在于它的可探測(cè)距離比較遠(yuǎn),適用速度能達(dá)到250km/h,但在絕大部分有限速的國家,使用成本相對(duì)更低且適用速度在160km/h內(nèi)的中距雷達(dá)來實(shí)現(xiàn)自適應(yīng)巡航(ACC)功能更劃算。
例如,奔馳S級(jí)就采用6顆毫米波雷達(dá)(1長(zhǎng)+1中+4短),如上圖,分別分布在前向雙模長(zhǎng)程毫米波雷達(dá)1顆,后向中遠(yuǎn)程毫米波雷達(dá)1顆,前/后保險(xiǎn)杠左右短程雷達(dá)共4顆。“短程+中程+長(zhǎng)程”毫米波雷達(dá)三者結(jié)合一起共同完成自適應(yīng)巡航(ACC)、自動(dòng)緊急制動(dòng)(AEB)、前方/后方碰撞預(yù)警(FCW/BCW)、變道輔助(LCA)、盲點(diǎn)檢測(cè)(BSD)、倒車輔助(BPA)、泊車輔助(PA)等多種ADAS功能。其中ACC、AEB、FCW、LCA作為汽車ADAS中最主要的防撞預(yù)警功能,是如何實(shí)現(xiàn)的?下面將詳細(xì)介紹。自適應(yīng)巡航(ACC)自適應(yīng)巡航(Adaptive Cruise Control,ACC),是一種可以依據(jù)設(shè)定的車速或者距離跟隨前方車輛行駛,或根據(jù)前車速度主動(dòng)控制本車行駛速度,最終將車輛與前車保持在安全距離的駕駛輔助功能,該功能最大的優(yōu)點(diǎn)是可以有效的解放駕駛者的雙腳,提高駕駛的舒適性。
ACC的實(shí)現(xiàn)原理:在車輛行駛過程中,安裝在車輛前部的毫米波雷達(dá)傳感器持續(xù)掃描車輛前方道路,同時(shí)輪速傳感器采集車速信號(hào)。當(dāng)與前車之間的距離過小時(shí),ACC系統(tǒng)可以通過與制動(dòng)防抱死系統(tǒng)、發(fā)動(dòng)機(jī)控制系統(tǒng)協(xié)調(diào)動(dòng)作,使車輪適當(dāng)制動(dòng),并使發(fā)動(dòng)機(jī)的輸出功率下降,以使車輛與前方車輛始終保持安全距離。ACC系統(tǒng)在控制車輛制動(dòng)時(shí),通常會(huì)將制動(dòng)減速限制在不影響舒適度的程度,當(dāng)需要更大的減速時(shí),ACC系統(tǒng)會(huì)發(fā)出聲、光預(yù)警信號(hào)通知駕駛者主動(dòng)采取制動(dòng)操作。自動(dòng)緊急制動(dòng)(AEB)自動(dòng)緊急制動(dòng)(Autonomous Emergency Braking,AEB),是一種汽車主動(dòng)安全輔助功能。AEB系統(tǒng)利用毫米波雷達(dá)測(cè)出與前車或者障礙物的距離,然后利用數(shù)據(jù)分析模塊將測(cè)出的距離與警報(bào)距離、安全距離進(jìn)行比較,小于警報(bào)距離時(shí)就進(jìn)行警報(bào)提示,而小于安全距離時(shí)即使在駕駛員沒有來得及踩制動(dòng)踏板的情況下,AEB系統(tǒng)也會(huì)啟動(dòng),使汽車自動(dòng)制動(dòng),從而確保駕駛安全。
據(jù)研究表明,90%的交通事故是由于駕駛者的注意力不集中而引起的,AEB技術(shù)能在現(xiàn)實(shí)世界中減少38%的追尾碰撞,且無論是在城市道路(限速60km/h)或郊區(qū)道路行駛的情況下,效果都顯著。所以,歐洲新車安全評(píng)鑒協(xié)會(huì)(Euro NCAP)在2014年率先將AEB系統(tǒng)納入整體安全評(píng)級(jí)中,而我國也在2018年將AEB加入了NCAP評(píng)分體系。前方防撞預(yù)警功能(FCW)前方防撞預(yù)警(Forward Collision Warning,F(xiàn)CW),通過毫米波雷達(dá)和前置攝像頭不斷監(jiān)測(cè)前方的車輛,判斷本車與前車之間的距離、方位及相對(duì)速度,探測(cè)到前方潛在的碰撞危險(xiǎn),當(dāng)駕駛員沒有采取制動(dòng)措施時(shí),儀表會(huì)顯示報(bào)警信息并伴隨聲音報(bào)警,警告駕駛員務(wù)必采取應(yīng)對(duì)措施。當(dāng)判斷到事故即將發(fā)生時(shí),系統(tǒng)會(huì)讓剎車自動(dòng)介入工作,從而避免事故發(fā)生或降低事故可能造成的風(fēng)險(xiǎn)。
AEB通過傳感器探測(cè)前方的車輛、行人等障礙物,如果發(fā)現(xiàn)距離過近且存在碰撞風(fēng)險(xiǎn)時(shí),進(jìn)行自動(dòng)制動(dòng)。FCW則可以理解為進(jìn)行自動(dòng)制動(dòng)之前的預(yù)警功能。其實(shí),F(xiàn)CW和AEB系統(tǒng)是相輔相成的關(guān)系,目的都是在行車時(shí)避免或減少碰撞事故的發(fā)生。變道輔助(LCA)變道輔助(lane change assist,LCA),是通過毫米波雷達(dá)、攝像頭等傳感器,對(duì)車輛相鄰兩側(cè)車道及后方進(jìn)行探測(cè),獲取車輛側(cè)方及后方物體的運(yùn)動(dòng)信息,并結(jié)合當(dāng)前車輛的狀態(tài)進(jìn)行判斷,最終以聲、光等方式提醒駕駛員,讓駕駛員掌握最佳變道時(shí)機(jī),防止變道引發(fā)的交通事故,同時(shí)對(duì)后方碰撞也有比較好的預(yù)防作用。變道輔助系統(tǒng)包括“盲點(diǎn)檢測(cè)(BSD)”、“變道預(yù)警(LCA)”、“后碰預(yù)警(RCW)”3個(gè)功能。可以有效地防止變道、轉(zhuǎn)彎、后方追尾等交通事故的發(fā)生,極大提升汽車變道操作的安全性能。
其中,BSD根據(jù)其判斷的移動(dòng)物體所處的相對(duì)位置及與本車的相對(duì)速度,當(dāng)處于本車的盲區(qū)范圍內(nèi),及時(shí)提醒駕駛員注意變道出現(xiàn)的風(fēng)險(xiǎn)。LCA檢測(cè)目標(biāo)車輛在相鄰的區(qū)域以較大的相對(duì)速度靠近本車,在兩車時(shí)距小于一定范圍內(nèi)時(shí),通過聲、光等方式提醒駕駛員。RCW檢測(cè)到同一車道后方有快速接近的移動(dòng)物體,并有碰撞風(fēng)險(xiǎn)時(shí),及時(shí)通過聲、光等方式,預(yù)警駕駛員系好安全帶等方式減小碰撞帶來的傷害。多種傳感器融合其實(shí)在這些駕駛輔助功能實(shí)現(xiàn)的過程中,我們不難發(fā)現(xiàn)雖然毫米波雷達(dá)起到了最核心的物體探測(cè)、測(cè)距和測(cè)速的作用,但是整個(gè)過程還需要其它傳感器的輔助,比如激光雷達(dá)、攝像頭、超聲波雷達(dá)、慣性傳感器等。隨著越來越多汽車廠商開始將不同的傳感器整合到汽車ADAS中,業(yè)界普遍認(rèn)為“傳感器融合(sensor fusion)”是高度自動(dòng)化駕駛安全性的關(guān)鍵。在環(huán)境感知中,每一種傳感器都有獨(dú)特的優(yōu)勢(shì)和弱點(diǎn)。例如,毫米波雷達(dá)不受天氣影響可全天候全天時(shí)工作,但分辨率不高,不能區(qū)分人和物;而攝像頭有更高的分辨率,能夠感知顏色,但受強(qiáng)光影響較大;激光雷達(dá)則能夠提供三維尺度感知信息,對(duì)環(huán)境的重構(gòu)能力強(qiáng),但受天氣影響大。傳感器各有優(yōu)劣,難以互相替代,未來要實(shí)現(xiàn)自動(dòng)駕駛,是一定需要多種傳感器相互配合共同構(gòu)成汽車的感知系統(tǒng)。如圖7,隨著自動(dòng)駕駛從L2級(jí)朝L5級(jí)自動(dòng)駕駛發(fā)展,集成在汽車上傳感器數(shù)量和種類不斷增加,只有這樣才能夠保證信息獲取充分且有冗余,才能達(dá)到OEM主機(jī)廠所需的安全標(biāo)準(zhǔn)。
軟件是多種傳感器融合的核心之一。算法是多傳感器融合通往更高級(jí)自動(dòng)駕駛技術(shù)的“攔路虎”,因?yàn)槎喾N傳感器的使用會(huì)使需要處理的信息量大增,這其中甚至有相互矛盾的信息,如何保證系統(tǒng)快速地處理數(shù)據(jù),過濾無用、錯(cuò)誤信息,從而保證系統(tǒng)最終做出及時(shí)正確的決策十分關(guān)鍵。目前多種傳感器融合的理論方法有貝葉斯準(zhǔn)則法、卡爾曼濾波法、D-S證據(jù)理論法、模糊集理論法、人工神經(jīng)網(wǎng)絡(luò)法等。因此,在使用多種傳感器的情況下,要想保證安全性,就必須對(duì)傳感器進(jìn)行信息融合。多傳感器融合可顯著提高系統(tǒng)的冗余度和容錯(cuò)性,從而保證決策的快速性和正確性,是現(xiàn)階段ADAS走向高級(jí)自動(dòng)駕駛并最終實(shí)現(xiàn)無人駕駛的必然趨勢(shì)。
●●●毫米波雷達(dá)其它應(yīng)用以及發(fā)展趨勢(shì):
毫米波雷達(dá)除了汽車ADAS應(yīng)用,還在無人機(jī)、安防、智能交通、工業(yè)以及軍用領(lǐng)域發(fā)揮著非常重要的作用。? 無人機(jī):主要應(yīng)用體現(xiàn)在定高和避障兩個(gè)方面。? 安防:主要應(yīng)用在一些重要的區(qū)域的安全警戒。? 智能交通:主要應(yīng)用于車輛檢測(cè)、交通量調(diào)查、交通事件檢測(cè)、交通誘導(dǎo)、超速監(jiān)測(cè)、電子卡口、電子警察和紅綠燈控制等。? 工業(yè):主要應(yīng)用于工業(yè)液位計(jì)、挖掘機(jī)、重型推土機(jī)、高壓電線塔附近安全施工、生產(chǎn)安全監(jiān)測(cè)等。? 軍用:主要應(yīng)用于雷達(dá)探測(cè)、導(dǎo)彈制導(dǎo)、衛(wèi)星遙感、電子對(duì)抗等。
綜上分析,毫米波雷達(dá)技術(shù)的發(fā)展趨勢(shì)是朝著體積更小、功耗更低、集成度更高和多項(xiàng)技術(shù)共存融合(性價(jià)比更高)方向發(fā)展。從頻段上,由于77GHz比24GHz具有更小的波長(zhǎng),可進(jìn)一步縮減天線尺寸,更便于安裝部署。同時(shí)77GHz頻段帶寬更大、探測(cè)距離更遠(yuǎn)、精度更高,正逐漸成為主流。不過24GHz在短程BSD/LCA等應(yīng)用成本優(yōu)勢(shì)明顯,將長(zhǎng)期與77GHz互補(bǔ)共存。在前端收發(fā)組件,高集成化的MMIC成為了主流,在工藝上先是SiGe替代了GaAs,當(dāng)前正慢慢朝CMOS方向發(fā)展。由于GaAs、SiGe和CMOS各有優(yōu)缺點(diǎn),在超高速、超高頻領(lǐng)域,CMOS目前還是比不上GaAs,市場(chǎng)上同時(shí)對(duì)于幾種工藝都有需求。對(duì)于汽車應(yīng)用來說,不僅要考慮毫米波雷達(dá)前端的集成,與其它傳感器的融合,還要考量與主處理器的“合作”,到底是集成還是分立,還是需靈活折中?從產(chǎn)品趨勢(shì)來看,一種是傳感器本身的融合或高度集成,如將毫米波雷達(dá)前端與攝像頭等其它傳感器集成;另一種是單芯片系統(tǒng)方案,即“多傳感器+主處理器+數(shù)字信號(hào)處理器”,未來的爭(zhēng)奪戰(zhàn)也將圍繞這兩方面展開,當(dāng)然性價(jià)比是前提。在市場(chǎng)需求層面,既需要有雷達(dá)前端集成芯片,亦需要單芯片系統(tǒng)方案,以滿足客戶的差異化需求。總之,上述技術(shù)發(fā)展最終結(jié)果是要實(shí)現(xiàn)“更小巧、更便宜、更智能”的毫米波雷達(dá),為ADAS、自動(dòng)駕駛和終極的無人駕駛服務(wù)!
-
傳感器
+關(guān)注
關(guān)注
2552文章
51302瀏覽量
755229 -
自動(dòng)駕駛
+關(guān)注
關(guān)注
784文章
13899瀏覽量
166701 -
毫米波雷達(dá)
+關(guān)注
關(guān)注
107文章
1052瀏覽量
64441
原文標(biāo)題:毫米波雷達(dá)技術(shù)發(fā)展趨勢(shì)及在ADAS中的應(yīng)用
文章出處:【微信號(hào):mwrfnet,微信公眾號(hào):微波射頻網(wǎng)】歡迎添加關(guān)注!文章轉(zhuǎn)載請(qǐng)注明出處。
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論