") 使用LabVIEW軟件和DSP實(shí)現(xiàn)液壓伺服控制系統(tǒng)設(shè)計(jì)與提高實(shí)時(shí)控制性
使用LabVIEW軟件和DSP實(shí)現(xiàn)液壓伺服控制系統(tǒng)設(shè)計(jì)與提高實(shí)時(shí)控制性
1 引言
隨著試驗(yàn)機(jī)技術(shù)的進(jìn)步,近年來國(guó)內(nèi)外電子液壓萬能試驗(yàn)機(jī)發(fā)展了3種不同控制方式:電液伺服閥控制、采用具有速度控制器的壓力閥控制和寬流量范圍的比例閥控制。電液倒服控制技術(shù)作為現(xiàn)代微電予技術(shù)、計(jì)算機(jī)技術(shù)和液壓技術(shù)的橋梁,已經(jīng)成為現(xiàn)代控制技術(shù)的重要組成部分。采用電液伺服閥控制的電子液壓萬能試驗(yàn)機(jī)除了控制技術(shù)外,還采用高精度力與位移傳感器的測(cè)量系統(tǒng)及計(jì)算機(jī)采集處理等技術(shù),在功能上達(dá)到甚至超過了電子萬能試驗(yàn)機(jī),尤其是在大負(fù)荷液壓萬能試驗(yàn)機(jī)上具有更大的優(yōu)勢(shì)。因此,廣泛應(yīng)用于汽車構(gòu)架的靜載、動(dòng)載和疲勞等材料的各種性能試驗(yàn)中。
本文在電液伺服控制技術(shù)的基礎(chǔ)上,對(duì)基于LabVIEW和TMS320F2812的液壓伺服控制系統(tǒng)進(jìn)行了深入的研究,本系統(tǒng)利用圖形化編程工具LabVIEW軟件編寫的上位機(jī)人機(jī)界面具有易于操作,便于維護(hù)等特點(diǎn)。系統(tǒng)采用數(shù)字信號(hào)處理器DSP中的TMS320F2812作為核心處理器的實(shí)時(shí)控制器,該控制器外擴(kuò)了數(shù)據(jù)存儲(chǔ)器和12位數(shù)模轉(zhuǎn)換電路,達(dá)到了系統(tǒng)的精度要求。
2 液壓伺服控制系統(tǒng)的組成
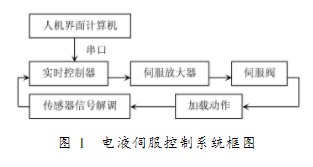
本文設(shè)計(jì)的電液伺服系統(tǒng)分為以高速數(shù)字處理器DSP為核心的集信號(hào)調(diào)理、數(shù)據(jù)采集、控制、轉(zhuǎn)換等于一身的實(shí)時(shí)控制器和利用圖形化編程工具LabVIEW軟件編寫的人機(jī)界面兩大部分。該系統(tǒng)利用串行通信口將試驗(yàn)機(jī)的操作者通過人機(jī)界而發(fā)出的各種控制命令發(fā)送到實(shí)時(shí)控制器,實(shí)時(shí)控制器按命令完成一系列操作并將液壓伺服系統(tǒng)的工作狀態(tài)通過串行通信口送到PC機(jī),并在PC機(jī)上的人機(jī)界面上顯示。
3 上位機(jī)人機(jī)界面軟件設(shè)計(jì)
3.1 LabVIEW簡(jiǎn)介
上位機(jī)人機(jī)界面軟件采用LabVIEW,他是實(shí)驗(yàn)室虛擬儀器集成環(huán)境(Laborator Virtual Instrument Engineering Workbenth)的簡(jiǎn)稱,LabVIEW采用G語言為其編程語言。G語言是一種適合應(yīng)用于任何編程任務(wù),具有擴(kuò)展函數(shù)庫(kù)的通用編程語言。和C語言等語言一樣,G語言定義了數(shù)據(jù)模型、結(jié)構(gòu)類型和模塊調(diào)用語法規(guī)則等編程語言的基本要素,在功能完整性和應(yīng)用靈活性上不遜色于任何高級(jí)語言。G語言與傳統(tǒng)高級(jí)編程語言最大的差別在于編程方式,一般高級(jí)語言采用文本編程,而G語言采用圖形化編程方式。
3.2 上位機(jī)人機(jī)界面功能介紹
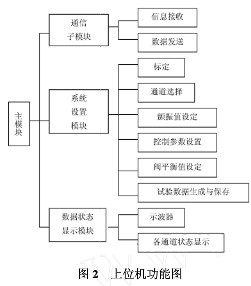
3.2.1 通信子模塊
通信子模塊包括信息的接收和數(shù)據(jù)的發(fā)送兩部分。信息接收功能是指上位機(jī)通過串口接收由下位機(jī)反饋回來的命令信號(hào)、狀態(tài)信號(hào)和反饋信號(hào),供上位機(jī)顯示和保存用。數(shù)據(jù)發(fā)送功能則是上位機(jī)通過串口以一定的協(xié)議發(fā)送幀信息,這些信息將包括所有對(duì)下位機(jī)的控制命令。
3.2.2 系統(tǒng)設(shè)置模塊
系統(tǒng)設(shè)置模塊簡(jiǎn)單介紹標(biāo)定與控制參數(shù)設(shè)定這兩部分。
標(biāo)定部分主要是根據(jù)載荷傳感器,位移傳感器等不同傳感器之間性能參數(shù)的不同而進(jìn)行的零點(diǎn)、增益、量程的標(biāo)定,從而為不同的控制方式提供參數(shù)標(biāo)準(zhǔn)。
控制參數(shù)設(shè)定包括控制方式的選擇,試驗(yàn)類型,限制值等參數(shù)的設(shè)置。
控制方式分為3種:位移控制、行程控制和載荷控制。這3種不同的控制方式所連接的現(xiàn)場(chǎng)設(shè)備都要經(jīng)過由靜態(tài)向動(dòng)態(tài)的工作過程,所以必須在靜態(tài)時(shí)設(shè)置其靜態(tài)初始值,同時(shí)規(guī)定其上下限值,超出這一范圍系統(tǒng)都要強(qiáng)行停機(jī)。實(shí)驗(yàn)類型分為常規(guī),擬動(dòng)力,疲勞,隨機(jī)波等。
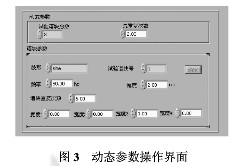
液壓伺服控制系統(tǒng)的正常工作是在各種不同模擬信號(hào)波形的驅(qū)動(dòng)下實(shí)現(xiàn)的,這就要求上位機(jī)設(shè)置這些波形的動(dòng)態(tài)實(shí)驗(yàn)參數(shù),以供下位機(jī)軟件產(chǎn)生這些波形。以正弦波為例,正弦波的幅值,頻率以及重復(fù)次數(shù),位于第幾譜塊等參數(shù)都要通過幀協(xié)議發(fā)送給下位機(jī)。
上位機(jī)也要將PID控制的P,I,D參數(shù)發(fā)送給下位機(jī),由于這些參數(shù)都是浮點(diǎn)型,而DSP2812只能處理定點(diǎn)數(shù)據(jù),所以上位機(jī)需要在發(fā)送數(shù)據(jù)前將浮點(diǎn)數(shù)轉(zhuǎn)化為定點(diǎn)數(shù),以便下位機(jī)識(shí)別。
3.2.3 狀態(tài)顯示模塊
示波器部分主要顯示通道命令、通道載荷和通道位移等曲線。
數(shù)據(jù)生成與保存是將試驗(yàn)的一些參數(shù)包括通道分配、控制方式、系統(tǒng)標(biāo)定的數(shù)據(jù)、載荷譜等數(shù)據(jù)保存在不同的文件中。
4 實(shí)時(shí)控制器的設(shè)計(jì)
4.1 實(shí)時(shí)控制器硬件設(shè)計(jì)
該系統(tǒng)的實(shí)時(shí)控制器結(jié)構(gòu)框圖如圖4所示,主要包括模擬信號(hào)輸入接口電路、信號(hào)調(diào)理電路、時(shí)鐘與復(fù)位電路、電源轉(zhuǎn)換電路、外部存儲(chǔ)器擴(kuò)展電路、數(shù)據(jù)通信接口電路、功率放大等部分。
本文采用DSP2812自帶外設(shè)ADC完成對(duì)信號(hào)的采集,同時(shí)外擴(kuò)了一片64 kB RAM芯片ISLV6416存儲(chǔ)臨時(shí)數(shù)據(jù),一片DAC7625芯片用以實(shí)現(xiàn)數(shù)字信號(hào)向模擬信號(hào)的轉(zhuǎn)換,轉(zhuǎn)換的模擬信號(hào)經(jīng)功率放大后輸出。

4.1.1 外部數(shù)據(jù)存儲(chǔ)器
外部數(shù)據(jù)存儲(chǔ)器采用ISSI公司的ISLV6416芯片,ISLV6416是一片64 k×16 b的高速靜態(tài)RAM,采用3.3 V電源供電,3.3 V電壓信號(hào)由電源轉(zhuǎn)換芯片TPS767D381PWP轉(zhuǎn)換實(shí)現(xiàn),他可將+5 V電壓轉(zhuǎn)換成+3.3 V和+1.8 V,這兩個(gè)電壓同時(shí)可供DSP工作。ISLV6416的控制信號(hào)OE(讀數(shù)據(jù)),WE(寫數(shù)據(jù))直接與DSP的XWE和XRD兩引腳相連,數(shù)據(jù)和地址線也直接與DSP相連。CE(片選)信號(hào)由地址線A16和外部空間選擇信號(hào)XZCS2相“或”產(chǎn)生,因此RAM的地址為0x00080000~0x0008FFFF。
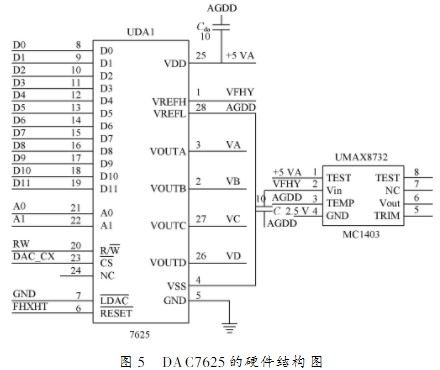
4.1.2 D/A轉(zhuǎn)換電路
由于伺服閥的輸入量是模擬信號(hào),而控制器處理后的輸出數(shù)據(jù)是數(shù)字量,因此,需要把數(shù)字量轉(zhuǎn)換為模擬量后輸出到伺服閥上。
在設(shè)計(jì)過程中,選擇了12位模數(shù)轉(zhuǎn)換芯片DAC7625,他是BURR-BROWN公司生產(chǎn)的一種低功耗12位并口輸出的模數(shù)轉(zhuǎn)換芯片,他的setting time 只有10 μs,支持單極和雙極輸出。12位數(shù)據(jù)可由TMS320F2812一次送出。根據(jù)電源供電方式的不同,4通道模擬輸出量電壓的范圍將由兩參考電壓端參考電壓決定。如單電源+5 v供電,參考電壓端VREFH輸入+2.5 V,VREFL接地,則模擬輸出量電壓范圍為0~2.5 V。若采用雙電源±5 v供電,參考電壓端VREFH輸入+2.5 V,VREFL輸入-2.5 V,則模擬輸出量電壓范圍為-2.5~+2.5 V。參考電壓可由芯片MAX1403產(chǎn)生。DAC7625選擇哪路模擬量輸出由兩個(gè)片選信號(hào)A0,A1決定。讀寫信號(hào)RW與DSP的XR/W腳相連,片選DAC_CS由地址線A16反相后與外部空間選擇信號(hào)XZCS2相“或”產(chǎn)生,所以DAC7625的地址范圍為:0x00090000~0x0009FFFF。
4.1.3 串口通信
整個(gè)DSP作為下位機(jī)的核心CPU,是通過串口實(shí)現(xiàn)與上位機(jī)的通信的,TMS320F2812有兩個(gè)片內(nèi)外設(shè)SCIA/SCIB實(shí)現(xiàn)串口通信功能。硬件電路采用符合RS232標(biāo)準(zhǔn)的驅(qū)動(dòng)芯片MAX232進(jìn)行串口通信。MAX232芯片功耗低,集成度高,+5 V供電,具有兩個(gè)接收和發(fā)送通道。
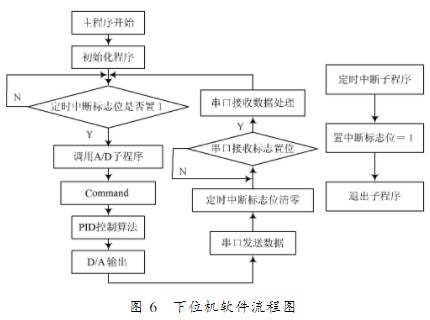
4.2 控制器的軟件設(shè)計(jì)
初始化程序包括各種參數(shù)和變量的初始化,啟動(dòng)定時(shí)器,由于此液壓伺服系統(tǒng)的控制信號(hào)為50 Hz以下,所以將定時(shí)時(shí)間確定為1 ms,完全滿足系統(tǒng)要求。1 ms定時(shí)后,檢測(cè)定時(shí)中斷標(biāo)志位是否置1,置位信號(hào)由中斷服務(wù)子程序完成,若已經(jīng)被置1則啟動(dòng)A/D轉(zhuǎn)換采集,A/D轉(zhuǎn)換主要負(fù)責(zé)數(shù)據(jù)采集、轉(zhuǎn)換、工程變換等工作,并根據(jù)相應(yīng)的控制模式,將相應(yīng)傳感器的信號(hào)作為控制器的反饋信號(hào),若未置位則返回等待。調(diào)用Command函數(shù),在Command函數(shù)中,程序根據(jù)相應(yīng)的控制狀態(tài)和控制參數(shù)計(jì)算當(dāng)前時(shí)刻的命令信號(hào),該命令信號(hào)由兩部分組成,一部分為靜態(tài)命令,另一部分為動(dòng)態(tài)命令,實(shí)際控制信號(hào)為兩部分之和,該信號(hào)為前饋PID控制的輸入信號(hào)。前饋PID控制函數(shù)則根據(jù)命令信號(hào)、反饋信號(hào)和相關(guān)參數(shù)(如PID參數(shù))計(jì)算輸出控制指令。D/A轉(zhuǎn)換函數(shù)主要是通過D/A板將計(jì)算機(jī)的控制指制信號(hào)為兩部分之和,該信號(hào)為前饋PID控制的輸入信號(hào)。前饋PID控制函數(shù)則根據(jù)命令信號(hào)、反饋信號(hào)和相關(guān)參數(shù)(如PID參數(shù))計(jì)算輸出控制指令。D/A轉(zhuǎn)換函數(shù)主要是通過D/A板將汁算機(jī)的控制指令轉(zhuǎn)換成為相應(yīng)的模擬量(該模擬信號(hào)通過伺服放大板進(jìn)行放大后驅(qū)動(dòng)伺服驅(qū)動(dòng)部分),串口發(fā)送程序子函數(shù)將控制器當(dāng)前時(shí)刻的所有信號(hào)(包括命令信號(hào)、狀態(tài)信號(hào)和反饋信號(hào))的數(shù)據(jù)傳送給上位機(jī),供上位機(jī)顯示和保存用。之后將標(biāo)志位清零并判斷串口接收標(biāo)志位是否為1,是則對(duì)已經(jīng)接收到的完整數(shù)據(jù)包處理,否則返回上一步。
5 結(jié)語
本文上位機(jī)采用高級(jí)圖形化編程工具LabVIEW編寫人機(jī)交互界面,美觀、易于操作,下位機(jī)采用TI公司的TMS320F2812為系統(tǒng)核心CPU,提高了系統(tǒng)運(yùn)行的速度、精度及穩(wěn)定性,外擴(kuò)存儲(chǔ)器增強(qiáng)了數(shù)據(jù)處理能力,并行12b DAC既滿足了控制精度的要求,也提高了整個(gè)系統(tǒng)的實(shí)時(shí)控制性。下位機(jī)軟件在定時(shí)周期1 ms內(nèi)完成A/D的轉(zhuǎn)換,Command命令計(jì)算,前饋PID控制算法,D/A輸出,串口通信等功能。整個(gè)系統(tǒng)工作穩(wěn)定,在實(shí)驗(yàn)中效果很好。
-
dsp
+關(guān)注
關(guān)注
553文章
8006瀏覽量
349108 -
控制器
+關(guān)注
關(guān)注
112文章
16379瀏覽量
178274 -
控制系統(tǒng)
+關(guān)注
關(guān)注
41文章
6625瀏覽量
110639
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于DSP的馬達(dá)控制系統(tǒng)
液壓控制系統(tǒng)能否用LABVIEW進(jìn)行仿真?
Vxworks系統(tǒng)基于Vxworks平臺(tái)的實(shí)時(shí)控制系統(tǒng)
VDC液壓控制系統(tǒng),VDC液壓控制系統(tǒng)是什么意思
基于DSP的高速開關(guān)閥控液壓缸位置控制系統(tǒng)研究
采用DSP的電液的伺服控制系統(tǒng)

基于LabVIEW的直流伺服電機(jī)模糊PID控制系統(tǒng)
基于DSP的伺服控制系統(tǒng)設(shè)計(jì)與實(shí)現(xiàn)
液壓伺服與比例控制系統(tǒng)
液壓伺服控制系統(tǒng)的控制要求
液壓伺服控制系統(tǒng)的控制要求
液壓伺服控制系統(tǒng)的組成及其組成部件的作用
伺服液壓機(jī)控制系統(tǒng)原理是什么
伺服控制系統(tǒng)的分類方式和常見伺服控制系統(tǒng)介紹






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論