") 通過容錯策略對球形機(jī)器人的設(shè)計(jì)方案
通過容錯策略對球形機(jī)器人的設(shè)計(jì)方案
自HALME A等于1996年首次研制出球形機(jī)器人以來,控制系統(tǒng)一直被視為球形機(jī)器人研究領(lǐng)域的關(guān)鍵問題。球形機(jī)器人結(jié)構(gòu)的特殊性和控制方法的復(fù)雜性使目前的研究內(nèi)容主要集中在動力學(xué)分析與建模和運(yùn)動控制與規(guī)劃策略的設(shè)計(jì)等方面,而關(guān)于如何設(shè)計(jì)可靠的、安全的控制系統(tǒng)以降低系統(tǒng)運(yùn)行時的故障率的研究卻少有涉及。
容錯控制系統(tǒng)能夠有效地提高系統(tǒng)的可靠性和安全性。趙京等通過構(gòu)造退化條件數(shù)和容錯空間影響因子等性能指標(biāo)來確定使冗余度機(jī)器人具有最佳容錯操作性能的設(shè)計(jì)參數(shù)。王太勇等將冗余容錯控制理論應(yīng)用于壁面爬行機(jī)器人系統(tǒng)中,將平均無故障工作時間延長1倍。而在實(shí)時嵌入式系統(tǒng)中,基于時間容錯技術(shù)設(shè)計(jì)的容錯策略對瞬間故障具有良好的容錯性能,而且占用較少的時間和存儲資源。FORSATI等綜合考慮信息容錯和時間容錯技術(shù),并應(yīng)用到電路系統(tǒng)的設(shè)計(jì)中,從而有效地降低了電路系統(tǒng)的復(fù)雜度,并在容許的時延內(nèi)較大地節(jié)省了硬件資源。
因此,本文以圖l所示的球形機(jī)器人為平臺,基于容錯策略設(shè)計(jì)球形機(jī)器人的控制系統(tǒng)。圖1所示的球形機(jī)器人由球殼、框架和重?cái)[組成,依靠兩組軸向垂直安裝的電動機(jī)改變重?cái)[的勢能來驅(qū)動球殼的運(yùn)動。該結(jié)構(gòu)具有利用最少的控制輸入達(dá)到全方位行走的特點(diǎn)。文獻(xiàn)分別針對此球形機(jī)器人的動力學(xué)建模、魯棒運(yùn)動控制和路徑跟蹤策略進(jìn)行了研究。本文的研究內(nèi)容同時也是這些研究工作的延續(xù),是實(shí)現(xiàn)球形機(jī)器人自主運(yùn)動控制的基礎(chǔ)。本文首先提出了球形機(jī)器人控制系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)方法,并在此基礎(chǔ)上設(shè)計(jì)復(fù)合型控制系統(tǒng)。然后基于不同的容錯技術(shù)分別設(shè)計(jì)了具有高可靠性的冗余雙備份電動機(jī)伺服控制系統(tǒng)和軟件系統(tǒng)。最后通過試驗(yàn)驗(yàn)證控制系統(tǒng)的可行性以及容錯策略的有效性,并對結(jié)果進(jìn)行具體分析和討論。
圖1 球形機(jī)器人
1 球形機(jī)器人控制系統(tǒng)的設(shè)計(jì)與分析
迄今為止,自主機(jī)器人的控制體系主要有3種典型的結(jié)構(gòu):基于功能分解和分層遞階的控制結(jié)構(gòu)、基于行為控制的反應(yīng)式控制結(jié)構(gòu)和基于規(guī)劃和反應(yīng)的混合式控制結(jié)構(gòu)。分層遞階式體系結(jié)構(gòu)控制結(jié)構(gòu)層次清楚,較好地解決了系統(tǒng)性能和控制精度的問題,但需要對外界環(huán)境進(jìn)行全面的感知和精確的建模。反應(yīng)式控制結(jié)構(gòu)中系統(tǒng)的各個層次均具有獨(dú)立的環(huán)境感知能力,對環(huán)境具有良好的魯棒性和適應(yīng)性,但缺少全局性的指導(dǎo)與協(xié)調(diào)。混合式控制結(jié)構(gòu)將環(huán)境感知、決策控制和上層推理等功能模塊有機(jī)地結(jié)合起來,既保留了分層結(jié)構(gòu)的系統(tǒng)性,又繼承了反應(yīng)式結(jié)構(gòu)的靈活性。因此,本文采用基于規(guī)劃和反應(yīng)的混合式控制結(jié)構(gòu)設(shè)計(jì)方法設(shè)計(jì)球形機(jī)器人的控制系統(tǒng),將信息處理模塊與電動機(jī)控制結(jié)合起來,上層采用有意識規(guī)劃,底層采用基于行為的電動機(jī)控制,構(gòu)成一個遞階式的控制結(jié)構(gòu)。
1.1 球形機(jī)器人控制系統(tǒng)的結(jié)構(gòu)設(shè)計(jì)方法
球形機(jī)器人(圖1)控制系統(tǒng)可以稱為“復(fù)合型控制系統(tǒng)”,是由控制算法和局部控制部件組成的。每個控制算法稱為基本控制器,相互之間存在上下等級和相互耦合的關(guān)系。部分能夠完成特定任務(wù)的基本控制器構(gòu)成了局部復(fù)合型控制器,而球形機(jī)器人的控制系統(tǒng)正是由這些局部復(fù)合型控制器構(gòu)成的。局部復(fù)合型控制器相互之間存在著局部的耦合關(guān)系,具有相互通信和信息交互的能力,在任務(wù)分配和協(xié)作方面具有自主性。為球形機(jī)器人自主運(yùn)動任務(wù)設(shè)計(jì)的8個局部復(fù)合型控制器的具體含義和功能如下。
(1)移動機(jī)器人監(jiān)控單元(Mobile robotsupervision unit,MRSU)是整個控制系統(tǒng)中最高級局部控制器,擁有最高級優(yōu)先權(quán),負(fù)責(zé)機(jī)器人傳感器的信息檢測、局部控制器的狀態(tài)協(xié)調(diào)、遠(yuǎn)程控制命令的接收和機(jī)器人狀態(tài)信息的反饋等。
(2)電動機(jī)監(jiān)控單元(Motor supervision unit,MSU)是電動機(jī)伺服控制子系統(tǒng)中的監(jiān)督級局部控制器,能夠根據(jù)具體運(yùn)動任務(wù)直接監(jiān)管下級局部控制器的運(yùn)行,并檢測電動機(jī)的運(yùn)行狀態(tài)。
(3)電動機(jī)控制單元(Momr control unit,MCU)負(fù)責(zé)電動機(jī)的運(yùn)動控制,并接收電動機(jī)監(jiān)控單元的監(jiān)管和調(diào)度。
(4)電源監(jiān)控單元(Power supervision unit,PSU)是電源子系統(tǒng)的監(jiān)督級局部控制器,負(fù)責(zé)監(jiān)管電源的運(yùn)行情況。
(5)運(yùn)動決策單元(Vehicle decision unit,VDU)能夠根據(jù)任務(wù)、環(huán)境信息和導(dǎo)航單元的信息做出有效的決策,并通過運(yùn)動控制單元控制機(jī)器人的運(yùn)動。
(6)導(dǎo)航系統(tǒng)單元(Navigation system unit,NSU)負(fù)責(zé)兩個激光測距儀和視覺傳感器的信號檢測、融合以及設(shè)備狀態(tài)監(jiān)控等任務(wù)。
(7)運(yùn)動控制單元(Vehicle control unit,VCU)執(zhí)行球形機(jī)器人速度和姿態(tài)的伺服控制。
(8)位姿觀測單元(Position attitude estimationunit,PAEU)實(shí)現(xiàn)光電編碼器與慣性測量裝置的信息融合,并對球形機(jī)器人的位姿信息進(jìn)行估計(jì)。
機(jī)器人監(jiān)控單元、電源監(jiān)控單元、運(yùn)動控制單元和位姿觀測單元分別對應(yīng)一個實(shí)時任務(wù),在基于高性能耐SC處理器(Advanced RISC Machines,ARM)設(shè)計(jì)的電路系統(tǒng)內(nèi)運(yùn)行。該電路系統(tǒng)可以稱為嵌入式控制器。運(yùn)動決策單元和導(dǎo)航系統(tǒng)單元分別對應(yīng)一個實(shí)時任務(wù),同樣在基于ARM設(shè)計(jì)的電路系統(tǒng)內(nèi)運(yùn)行。該電路系統(tǒng)可以稱為環(huán)境探測器。電動機(jī)監(jiān)控單元和電動機(jī)控制單元分別對應(yīng)一個實(shí)時任務(wù),在基于數(shù)字信號處理器(Digital signalprocessor DSP)設(shè)計(jì)的電動機(jī)伺服控制器內(nèi)運(yùn)行。球形機(jī)器人控制系統(tǒng)邏輯結(jié)構(gòu)如圖2所示。
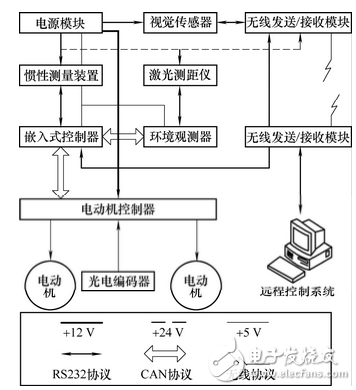
圖2 球形機(jī)器人控制系統(tǒng)邏輯結(jié)構(gòu)圖
1.2 球形機(jī)器人控制系統(tǒng)的結(jié)構(gòu)分析
根據(jù)圖2提出的結(jié)構(gòu)設(shè)計(jì)方法研制的球形機(jī)器人控制系統(tǒng)的主要組成部分有:伺服控制子系統(tǒng)、電源子系統(tǒng)、導(dǎo)航與傳感子系統(tǒng)、通信子系統(tǒng)、嵌入式控制子系統(tǒng)和遠(yuǎn)程控制系統(tǒng)等。其中伺服驅(qū)動子系統(tǒng)由電動機(jī)、減速器和電動機(jī)驅(qū)動器組成;導(dǎo)航和傳感子系統(tǒng)由慣性測量裝置、激光測距儀、視覺傳感器和光電編碼器組成:通信子系統(tǒng)由現(xiàn)場總線、串行總線和無線發(fā)送/接收模塊組成:嵌入式控制子系統(tǒng)由嵌入式控制器和環(huán)境探測器組成;遠(yuǎn)程監(jiān)控系統(tǒng)能夠通過無線通信模塊實(shí)時查詢球形機(jī)器人嵌入式控制系統(tǒng)的工作狀態(tài),設(shè)置球形機(jī)器人的工作模式。而且,每個子系統(tǒng)的實(shí)體在具體實(shí)現(xiàn)時,并非相互獨(dú)立的。球形機(jī)器人控制系統(tǒng)的組成如圖3所示。嵌入式控制器通過控制器局域網(wǎng)(Controller area network,CAN)總線分別接收來自環(huán)境探測器的關(guān)于激光測距儀的信息和來自伺服驅(qū)動器的光電編碼器的信息,同時通過RS232總線分別接收來自慣性測量裝置和視覺傳感器的數(shù)據(jù)信息以及遠(yuǎn)程控制信息,并對所有的信息數(shù)據(jù)進(jìn)行分析和融合,根據(jù)任務(wù)和環(huán)境做出相應(yīng)的決策,再通過CAN總線發(fā)送給伺服驅(qū)動器,從而控制電動機(jī)的動作。嵌入式控制器利用CAN總線和RS232總線實(shí)時監(jiān)測每個傳感器和伺服驅(qū)動器的狀態(tài),同時通過無線模塊將系統(tǒng)的運(yùn)行狀態(tài)反饋給遠(yuǎn)程監(jiān)控系統(tǒng)。
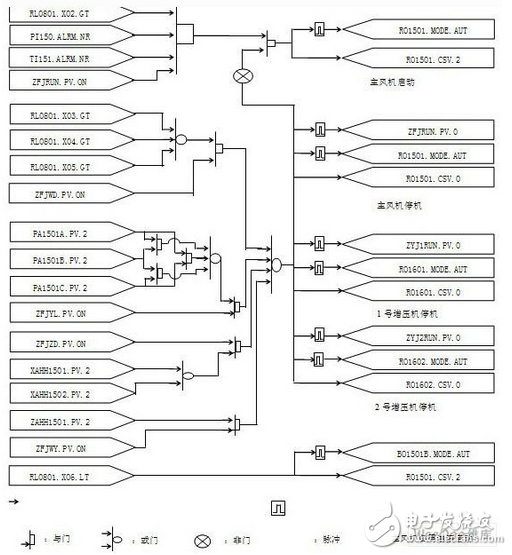
圖3 球形機(jī)器人控制系統(tǒng)組成方框圖
2 球形機(jī)器人控制系統(tǒng)的容錯策略
球形機(jī)器人的控制系統(tǒng)是一個比較復(fù)雜的計(jì)算機(jī)控制系統(tǒng),硬件和軟件的規(guī)模比較大,因此系統(tǒng)出現(xiàn)故障的概率也較大。為了降低由于軟硬件問題頻頻發(fā)生的運(yùn)行故障的概率,必須努力尋求提高控制系統(tǒng)可靠性的方法。除了篩選更可靠的元器件和設(shè)備,努力提高工程技術(shù)外,本節(jié)基于容錯策略研究球形機(jī)器人伺服控制子系統(tǒng)和軟件系統(tǒng)的設(shè)計(jì)方法。
2.1 冗余雙備份伺服控制子系統(tǒng)的設(shè)計(jì)
本文提出了一種冗余雙備份的電動機(jī)伺服控制子系統(tǒng)。兩個電動機(jī)均為無刷直流電動機(jī),并裝配了行星減速器和光電編碼器以及驅(qū)動控制器。伺服控制子系統(tǒng)采用兩套相同的驅(qū)動控制器在仲裁管理下共同控制一個電動機(jī)的運(yùn)行模式。如果嵌入式控制器檢測到某個驅(qū)動器出現(xiàn)故障,可以利用切換電路將電動機(jī)的繞組切換到備份驅(qū)動器的繞組接口上,從而實(shí)現(xiàn)對電動機(jī)的連續(xù)控制。如圖4所示,嵌入式控制器發(fā)出的信號“Set”和“Clk”經(jīng)過雙路D觸發(fā)器產(chǎn)生等效的“與”邏輯切換控制信號“SW”。D觸發(fā)器不僅對切換控制信號具有保持作用,而且雙D觸發(fā)器同樣采用了雙備份的設(shè)計(jì),提高系統(tǒng)的可靠性。圖4中的3個反饋信號“M_A”、“M_B”和“M_C”經(jīng)過檢測電路的邏輯組合產(chǎn)生3個信號,分別為“M_F”、“M&D_F”和“D_F”,并反饋回嵌入式控制器的外部中斷端口。如果嵌入式控制器檢測到這3個反饋信號中的任何1個為“事故信號”,則根據(jù)“事故”類型采取對應(yīng)的措施,最“壞”的情況是通過CAN總線關(guān)閉電動機(jī)伺服驅(qū)動器。切換電路利用光耦設(shè)備控制繼電器實(shí)現(xiàn)繞組的切換。嵌入式控制器利用CAN總線實(shí)時監(jiān)控驅(qū)動控制器的運(yùn)行狀態(tài)。當(dāng)執(zhí)行切換任務(wù)時,可以通過觸發(fā)器控制相應(yīng)光耦設(shè)備的輸出,并根據(jù)嵌入式控制器外部中斷的狀態(tài)判斷動作執(zhí)行的結(jié)果。故障檢測信號的邏輯觸發(fā)關(guān)系為:①M(fèi) F=M A&MB&M_C;②M&D_F=M_A&M_B&M_C&D_F:③D_ F=Q_N_A&Q_N_B。
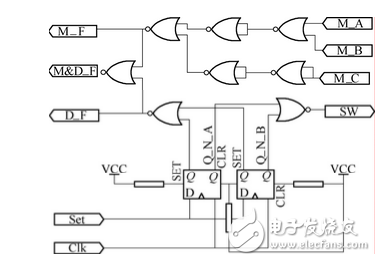
圖4 雙備份切換信號保持與反饋電路原理
冗余雙備份伺服控制子系統(tǒng)的信號關(guān)系如圖5所示。根據(jù)可靠性級別的高低,可以選擇熱備份和冷備份兩種執(zhí)行方式。熱備份是指在系統(tǒng)啟動時,同時對冗余的驅(qū)動控制器進(jìn)行初始化,但它僅處于“預(yù)操作”模式。當(dāng)發(fā)生切換任務(wù)時,冗余驅(qū)動控制器立即由“預(yù)操作”模式進(jìn)入工作模式。冷備份則需要在切換前由嵌入式控制器對冗余驅(qū)動控制器進(jìn)行初始化,再進(jìn)入熱備份階段。雖然后者實(shí)時性較前者多了一個“啟動一初始化”周期,但功耗較小。冗余雙備份伺服控制器如圖6所示。
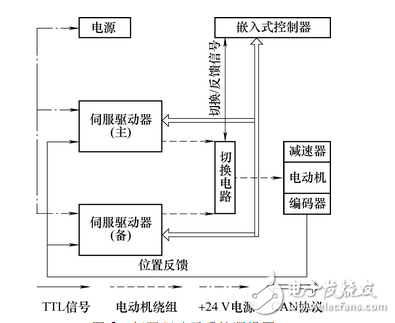
圖5 伺候驅(qū)動子系統(tǒng)邏輯圖
圖6 冗余雙備份伺服驅(qū)動器
綜上所述,球形機(jī)器人的冗余雙備份伺服控制子系統(tǒng)是由兩個相同的備份模塊組成的,通過故障檢測、故障定位以及系統(tǒng)恢復(fù)實(shí)現(xiàn)容錯功能。由于系統(tǒng)恢復(fù)采用重組技術(shù),因此系統(tǒng)的冗余結(jié)構(gòu)可以根據(jù)故障情況發(fā)生相應(yīng)的變化。若運(yùn)行的模塊(伺服控制器)發(fā)生故障,則可以通過重組備用模塊(伺服控制器)使整個系統(tǒng)恢復(fù)正常運(yùn)行。在重組的過程中,7伺服控制子系統(tǒng)的運(yùn)行發(fā)生了暫時中斷。
2.2 軟件系統(tǒng)的容錯策略
球形機(jī)器人控制系統(tǒng)的軟件主要采用了時間容錯和信息容錯的設(shè)計(jì)方法。時間容錯方法是以犧牲時間來換取系統(tǒng)高可靠性的一種手段。信息容錯是指為了檢測和糾正信息在運(yùn)算或傳輸過程中的錯誤而外加了一部分冗余信息碼,使原來不相關(guān)的數(shù)據(jù)變?yōu)橄嚓P(guān),并把這些冗余碼作為監(jiān)督碼與有關(guān)的信息一起傳遞,從而實(shí)現(xiàn)冗余容錯。
球形機(jī)器人控制系統(tǒng)的軟件采用兩種方式的時間容錯設(shè)計(jì)方法:一種是有限地降低系統(tǒng)的運(yùn)行速度以提高系統(tǒng)的可靠性;另一種是通過重復(fù)執(zhí)行指令或者程序來檢測故障。球形機(jī)器人系統(tǒng)在運(yùn)行過程中,環(huán)境等因素的變化可能導(dǎo)致系統(tǒng)出現(xiàn)某些故障。此時,在保證設(shè)備基本功能的范圍內(nèi),通過降低設(shè)備運(yùn)行速度,可以有效地排除某些故障。例如降低嵌入式控制器查詢指令周期可以有效地減輕總線的負(fù)荷,避免由于總線堵塞而引發(fā)的故障。環(huán)境探測器的某些指令重復(fù)執(zhí)行一定的次數(shù),可以對瞬時性故障起到過濾的作用,保證原程序繼續(xù)向前執(zhí)行。指令的重復(fù)執(zhí)行雖然增加了系統(tǒng)的運(yùn)行時間,但可以有效地消除瞬時故障的影響。
球形機(jī)器入控制系統(tǒng)的通信程序采用了信息容錯技術(shù),其檢錯和糾錯碼分別為奇偶校驗(yàn)碼、校驗(yàn)和以及循環(huán)冗余校驗(yàn)碼。例如基于串行總線的通信設(shè)備(慣性測量裝置、激光測距儀和無線傳感器等),在數(shù)據(jù)鏈路層采用奇偶校驗(yàn)碼,而在應(yīng)用協(xié)議層則采用校驗(yàn)和的方式。對于基于現(xiàn)場總線的通信設(shè)備(嵌入式控制器、伺服控制器和環(huán)境探測器),循環(huán)冗余校驗(yàn)則是一種有效的冗余校驗(yàn)方法。
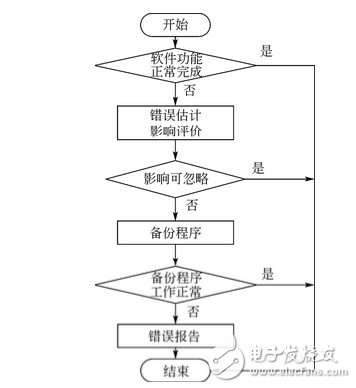
圖7 球形機(jī)器人控制系統(tǒng)監(jiān)控程序流程圖
本文除采用時間容錯和信息容錯的方法提高系統(tǒng)軟件的可靠性外,還為運(yùn)動決策子程序、運(yùn)動控制子程序和雙備份切換子程序分別設(shè)計(jì)了監(jiān)控子程序用于監(jiān)視這些程序的運(yùn)行狀態(tài)。監(jiān)控程序的基本流程如圖7所示,首先判斷軟件功能是否正常完成,然后通過錯誤估計(jì)判斷軟件已經(jīng)執(zhí)行的功能與設(shè)計(jì)目標(biāo)的偏差。如果存在較大偏差,通過影響*價來估計(jì)軟件未來的執(zhí)行結(jié)果以及主程序是否能夠完成設(shè)計(jì)目標(biāo)。若預(yù)期軟件的繼續(xù)運(yùn)行可以達(dá)到目標(biāo),則可以忽略該錯誤,主程序繼續(xù)運(yùn)行;反之,錯誤不可忽略。這時需要調(diào)用備份程序。如果備份程序仍然不能正常工作,則提示軟件錯誤。
綜上所述,球形機(jī)器人控制系統(tǒng)軟件容錯主要有以下特點(diǎn)。
(1)容錯的對象是規(guī)定功能的軟件,這些功能是根據(jù)任務(wù)需求定義的,包括魯棒運(yùn)動控制子程序、路徑跟蹤控制予程序和切換控制子程序等。容錯只是為了保證當(dāng)編程缺陷導(dǎo)致系統(tǒng)出現(xiàn)故障時,能夠維持這些功能。如果軟件的設(shè)計(jì)是完全正確的(理想軟件),那么容錯部分將不起任何作用。
(2)容錯的能力總是有一定限度的,這是因?yàn)檐浖毕莺芏嗍遣豢深A(yù)見的。對于球形機(jī)器人控制系統(tǒng)而言,輸入信息的構(gòu)成也極為復(fù)雜。因此,即使是軟件容錯有時會失效,有時即使不完全失效,也只是維持其部分功能作降級運(yùn)行。
(3)當(dāng)軟件由于自身存在缺陷而在運(yùn)行中出現(xiàn)故障時,若其為容錯軟件,則能夠屏蔽這一故障,對其進(jìn)行處理以避免失效。這一功能是通過故障檢測、故障恢復(fù)以及調(diào)動軟件冗余備份來實(shí)現(xiàn)的。這里所說的冗余備份,不是指球形機(jī)器人控制軟件的全部功能,而是其中的各個功能塊、子程序或程序段。這些備份程序、檢測程序和恢復(fù)程序一起統(tǒng)稱為容錯資源。一個容錯軟件實(shí)際是由規(guī)定功能的常規(guī)軟件和容錯軟件共同來實(shí)現(xiàn)的。常規(guī)軟件是主體,容錯軟件只是為了提高可靠性。
3 球形機(jī)器人控制系統(tǒng)的試驗(yàn)研究
為了驗(yàn)證設(shè)計(jì)的球形機(jī)器人控制系統(tǒng)的可行性,本節(jié)進(jìn)行試驗(yàn)研究。在試驗(yàn)過程中,嵌入式控制系統(tǒng)控制球形機(jī)器人的框架保持垂直于地面的姿態(tài),并繞中垂線勻速轉(zhuǎn)動,此時機(jī)器人像“陀螺”一樣在原地旋轉(zhuǎn)。在運(yùn)動過程中每間隔約50S,遠(yuǎn)程監(jiān)控系統(tǒng)向嵌入式控制器發(fā)出電動機(jī)伺服控制子系統(tǒng)出現(xiàn)故障的信息,從而簡單地模擬實(shí)際中的情況以檢驗(yàn)冗余雙備份伺服控制器的工作情況。試驗(yàn)流程如圖8所示。
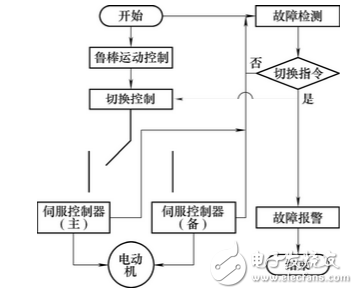
圖8 冗余雙備份試驗(yàn)流程圖
圖8中的魯棒運(yùn)動控制策略,能夠分別保證球形機(jī)器人的姿態(tài)和轉(zhuǎn)動速度收斂到期望的鄰域內(nèi),而且具有一定的魯棒性。試驗(yàn)過程中旋轉(zhuǎn)運(yùn)動的伺服控制子系統(tǒng)的試驗(yàn)結(jié)果如下表所示。在整個試驗(yàn)過程中,遠(yuǎn)程監(jiān)控系統(tǒng)共發(fā)出了5次故障信息。初始時刻球形機(jī)器人控制系統(tǒng)采用熱備份的方式選擇“主”份電動機(jī)伺服控制器進(jìn)行正常工作。當(dāng)嵌入式控制器在第一次接收到“主”份電動機(jī)伺服系統(tǒng)故障信息后,通過切換電路將輸出繞組切換到“備”份電動機(jī)伺服控制器上,同時啟動“備”份電動機(jī)伺服控制器,并采用指示燈顯示和向遠(yuǎn)程監(jiān)控系統(tǒng)發(fā)送信息的方式報警。切換任務(wù)完成后球形機(jī)器人仍然進(jìn)行正常地旋轉(zhuǎn)運(yùn)動。運(yùn)動約50 S后,遠(yuǎn)程控制系統(tǒng)首先清除“主”份伺服控制器的“故障”狀態(tài),再向嵌入式控制器發(fā)出“備”份伺服控制器故障信息。嵌入式控制器通過切換電路將輸出繞組重新切換到已經(jīng)恢復(fù)正常的“主”份伺服控制器上,同時啟動“備”份電動機(jī)伺服控制器,并采用指示燈顯示和向遠(yuǎn)程監(jiān)控系統(tǒng)發(fā)送信息的方式報警。切換任務(wù)完成后球形機(jī)器人仍然正常地進(jìn)行旋轉(zhuǎn)運(yùn)動。
表 電動機(jī)伺服控制系統(tǒng)容錯試驗(yàn)數(shù)據(jù)
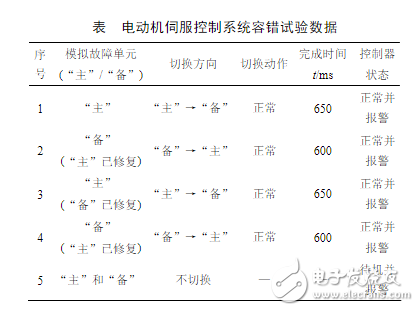
上述“故障信息”模擬試驗(yàn)重復(fù)進(jìn)行了4次。當(dāng)嵌入式控制器接收到“主”份和“備”份伺服控制器均出現(xiàn)故障的信息后,停止切換任務(wù),并將自身調(diào)整到待機(jī)狀態(tài),同時采用指示燈顯示和向遠(yuǎn)程監(jiān)控系統(tǒng)發(fā)送信息的方式報警。在切換過程中,機(jī)器人旋轉(zhuǎn)角速度的響應(yīng)曲線如圖9所示。在每次切換任務(wù)執(zhí)行過程中,電動機(jī)的輸出受到擾動,致使機(jī)器人旋轉(zhuǎn)角速度發(fā)生變化。當(dāng)切換任務(wù)完成后,執(zhí)行伺服控制任務(wù)的伺服控制系統(tǒng)調(diào)整電動機(jī)的輸出使機(jī)器人旋轉(zhuǎn)角速度重新穩(wěn)定到期望值附近。綜上所述,本文設(shè)計(jì)的冗余雙備份伺服控制系統(tǒng)成功實(shí)現(xiàn)了冗余容錯控制,最大切換時間為650IllS,且切換任務(wù)運(yùn)行正常。但同時發(fā)現(xiàn)在切換過程中,球形機(jī)器人的狀態(tài)出現(xiàn)了輕微地抖動。經(jīng)過試驗(yàn)觀測和分析,發(fā)現(xiàn)球殼與地面接觸部分不夠光滑,同時機(jī)器人內(nèi)部機(jī)構(gòu)的質(zhì)量分布相對于中垂線非對稱性較大,從而增強(qiáng)了對運(yùn)動控制策略的干擾。為了克服這種現(xiàn)象,除提高機(jī)器人的裝配精度和魯棒控制策略的控制能力外,可以采用諸如預(yù)測控制、前饋控制等作為過渡控制算法以提高系統(tǒng)切換的動態(tài)特性。
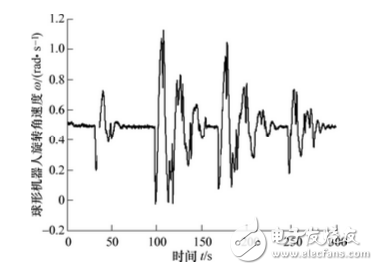
圖9 雙備份切換試驗(yàn)中旋轉(zhuǎn)角速度的響應(yīng)曲線
結(jié)論
(1)針對球形機(jī)器人控制系統(tǒng)復(fù)雜性和結(jié)構(gòu)特殊性,提出了球形機(jī)器人控制系統(tǒng)的設(shè)計(jì)方法,并將控制問題分解為s個局部控制器。這些局部控制器的集合構(gòu)成了球形機(jī)器人的控制系統(tǒng),而且局部子控制器相互之間具有通信和信息交互的能力,在任務(wù)分配和協(xié)作方面具有自主性。
(2)基于提出的控制系統(tǒng)結(jié)構(gòu),研制了球形機(jī)器人的嵌入式控制系統(tǒng),論述了各個組成部分之間的相互關(guān)系。
(3)為了提高球形機(jī)器人控制系統(tǒng)的可靠性,基于容錯控制技術(shù)研制了冗余雙備份伺服控制子系統(tǒng);基于時間容錯、信息容錯和監(jiān)控軟件技術(shù)設(shè)計(jì)了軟件系統(tǒng)。試驗(yàn)結(jié)果表明基于容錯策略設(shè)計(jì)的球形機(jī)器人控制系統(tǒng)是有效的、可行的。
-
控制器
+關(guān)注
關(guān)注
112文章
16384瀏覽量
178336 -
機(jī)器人
+關(guān)注
關(guān)注
211文章
28466瀏覽量
207330 -
無刷直流電動機(jī)
+關(guān)注
關(guān)注
1文章
53瀏覽量
13936
發(fā)布評論請先 登錄
相關(guān)推薦





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論