 直角坐標機器人的結構組成及在鋁錠搬運中的應用
直角坐標機器人的結構組成及在鋁錠搬運中的應用
直角坐標機器人概念:工業應用中,能夠實現自動控制的、可重復編程的、多功能的、多自由度的、運動自由度間成空間直角關系、多用途的操作機。他能夠搬運物體、操作工具,以完成各種作業。關于機器人的定義隨著科技的不斷發展,在不斷的完善,直角坐標機器人作為機器人的一種,其含義也在不斷的完善中。
本文就主要介紹直角坐標機器人在鋁錠搬運中的應用。
在以前的鋁錠生產中,鋁錠的搬運和碼垛一直是制約鋁錠產量的難題和瓶頸,由于國內制造的傳統機械手一般都采用液壓驅動,強制定位,所以正個搬運過程中沖擊非常大,定位也不準確,經常掉錠,鋁垛也碼不整齊,導致最后沒有辦法打包。所以工廠不得不配備幾名工人,撿漏拾遺,工人的勞動強度非常大,而且還影響了整個生產的效率和產量。而目前國外的鋁錠搬運和碼垛全部是采用六自由度的懸臂式機械手,這種設備非常昂貴,一臺22T/H的鋁錠生產線機械手價格高達300多萬元,而在國內這樣的一條生產線也只買200萬元。因此開發出一種價格便宜,自動化程度高的搬運機器人成了眾多冶金設備企業和鋁業公司的迫切希望。
要求:按層碼垛
運動空間為三維,四自由度運動。
行程:X方向2200mm, Y方向1500mm, Z方向1200mm, 水平旋轉:+-900
能夠和生產線融為一體,有良好的通訊。
最大負載重量為150Kg,額定負載125Kg.層與層間成90度角交叉排放。
每垛共九層,垛高1000mm.
最快碼垛速度為1000mm/s,平均速度為500mm/s.
碼垛精度:1mm
根據以上要求,我們設計了一臺四坐標機器人。介紹如下:
機器人組成:
該機器人由安裝架、機器人定位系統、伺服驅動系統、供膠系統及涂膠槍、控制系統及電控配電系統、安全防護裝置等組成。
1、機器人安裝架
因為該機器人碼垛機的運動速度很快,起停狀態對安裝架有很大的沖擊。安裝架必須有非常好的剛性才能保證機器人運行的穩定。
我們為此設計了焊接鋼架結構作為支撐架。又因為鋁廠有較大的灰塵水氣,我們在機器人的上部分設計了鋁架結構,并用玻璃罩將機器人罩住。使用鋁型材的好處是重量輕。
2、機器人定位系統
機器人定位系統是整臺設備的核心,為德國NCF公司產品,運動速度快,而重復精度比較高高, X,Y,Z三坐標均選擇為同步齒形帶傳動,單坐標重復定位精度為0.05mm,最快直線運動速度:1000mm/s.其中X坐標軸為兩根長度為 3000mm,跨度為2200mm的定位系統,由同步傳輸器保證兩根定位系統運動的同步,由一臺3000W伺服電機驅動。出于驅動扭矩及慣量的匹配,需要配一臺行星減速機。
Y軸選用雙定位系統,之所以選者如此大截面的定位單元,主要是因為Y軸為雙端支撐,中間懸空結構,如果選擇的截面不夠,將不能保證機器人運動的平穩性,機器人在高速運動時將發生振顫。兩根定位單元并排使用,將Z軸夾在中間,能夠很好的平衡負載,這種安裝方式具有非常好的穩定性。兩根定位系統由一臺2500W伺服電機驅動,出于驅動扭矩及慣量的匹配,需要配一臺行星減速機。
Z軸定位系統牢固穩定。該產品一般滑塊固定而定位體作伸縮式運動,驅動定位體的伺服電機驅動和滑塊安裝在一起。該伺服電機因需要將物體快速提升,需要克服很大的重力和加速力,需要較大的功率才可以。
實際應用中我們選擇了一臺4000W帶抱閘的伺服電機,匹配了一臺一臺行星減速機。
旋轉軸與Z軸是集成在一起的,通過在Z軸定位體中心添加一根貫穿的長軸實現的。長軸的最上端作為驅動端,與伺服電機安裝在一起。
長軸的最下端作為負載端,用于安裝物體。因物體較重,轉動慣量較大,不能直接安裝在驅動軸,必須加一臺盤式減速機才能匹配。伺服電機的動力先由長軸傳輸到減速機再傳輸到負載,就實現了旋轉負載的功能。
3、伺服驅動系統
伺服驅動系統(Servo System)簡稱伺服系統,是一種以機械位置或角度作為控制對象的自動控制系統,例如數控機床等。使用在伺服系統中的驅動電機要求具有響應速度快、定位準確、轉動慣量 .轉動慣量反映了系統的加速度特性,在選擇伺服電機時,系統的轉動慣量不能大于電機轉動慣量的3倍。)較大等特點,這類專用的電機稱為伺服電機。當然,其基本工作原理和普通的交直流電機沒有什么不同。該類電機的專用驅動單元稱為伺服驅動單元,有時簡稱為伺服,一般其內部包括電流、速度和/或位置閉環。
該碼垛機器人的選用具有Profibus 功能的伺服電機。每個運動軸配有一臺伺服電機及一臺減速機,四個運動軸,共四套伺服電機和四臺減速機,其中垂直運動軸為帶抱閘伺服電機。
4、機器抓手
該機械手選用德國菲施托氣動機械手,壓力可調,配備壓力緩沖閥,使夾持動作平穩抓手上裝有感應機構,能夠自動感知物體,并通知控制中心進行物體抓放。
5、控制系統
控制系統由大型PLC、觸摸屏組成。該系統擁有強大的Profibus通訊功能。能夠將數據實時傳輸給以太網,能夠將控制指令以總線的方式發送給伺服系統,使整個的運動相當流暢。該系統可預置多種工件的程序,更換品種時可在觸摸屏上調用相應程序。
6、安全防護裝置
該機具有故障提示及報警功能,并且每次出現故障時都能準確的反映出故障具體位置,便于迅速排除故障,主要包括:機器人碰撞保護功能;工件安裝到位檢測;光幕安全保護。
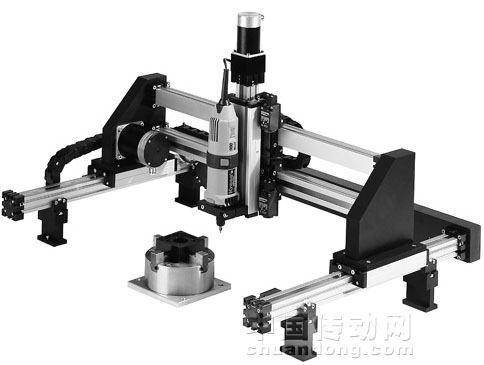
7、碼跺機結構如下:
-
控制系統
+關注
關注
41文章
6650瀏覽量
110755 -
機器人
+關注
關注
211文章
28593瀏覽量
207823 -
自動控制
+關注
關注
10文章
720瀏覽量
44267
發布評論請先 登錄
相關推薦
德國BAHR直角坐標機器人在無損探傷設備的應用
直角坐標機器人和關節機器人的特性及應用對比
直角坐標機器人的定義及主要特點
淺談無損檢測行業中直角坐標機器人的運用
直角坐標機器人碼垛機的工作原理以及產品特點的介紹
直角坐標機器人在紙箱搬運碼垛中的應用分析
直角坐標機器人&關節機器人的區別詳解
直角坐標機器人&amp;關節機器人的區別詳解

機械手的直角坐標|多關節|圓柱坐標|極(球)坐標式運行方式簡述
直角坐標機器人在精密制造中可以執行哪些任務?






 工商網監
工商網監
評論