") ONK品牌伺服驅(qū)動(dòng)器在橫切系統(tǒng)中的應(yīng)用
ONK品牌伺服驅(qū)動(dòng)器在橫切系統(tǒng)中的應(yīng)用
引言:
隨著電線電纜行業(yè)的迅猛發(fā)展,電纜生產(chǎn)線的生產(chǎn)效率逐年提高,主要體現(xiàn)在電纜生產(chǎn)線后端的電腦成圈機(jī)速度的大幅提高。電腦成圈機(jī)的控制部分需滿足精準(zhǔn)的裁切長度的同時(shí)還要滿足很高的裁切速度。其難點(diǎn)在于電纜處于高速運(yùn)動(dòng)狀態(tài),切刀的動(dòng)態(tài)控制需極高的運(yùn)算速度和極高的跟蹤性能。變頻器的控制無法達(dá)到高的擺桿速度(40M/min—80M/min),擺桿誤差也隨速度的提高而越來越大,PLC對脈沖的反饋速度也無法滿足裁切精度的要求。運(yùn)動(dòng)控制卡加進(jìn)口伺服系統(tǒng)的控制方式是完全可以滿足精度和速度的雙向要求,速度可達(dá)到200M/min—300M/min,還是有價(jià)格昂貴,供貨時(shí)間長等不足之處。本文著重介紹的將運(yùn)動(dòng)控制卡集成在伺服驅(qū)動(dòng)器之內(nèi)的ONK品牌伺服驅(qū)動(dòng)器在橫切系統(tǒng)中的應(yīng)用。
1.工藝要求:
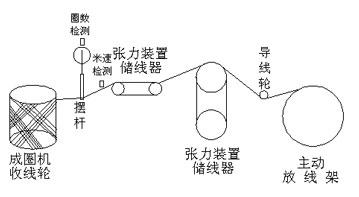
a. 擺桿與成圈機(jī)收線輪同步,電纜密集度要均勻;
b.擺桿每30圈為一個(gè)周期,到達(dá)30圈重新回到起點(diǎn)繞制第二圈,
預(yù)留中間出線孔,出線孔位置要一致,不能被電纜壓住,
為2段速運(yùn)行,直到到達(dá)預(yù)定米數(shù)停機(jī)。
2.伺服功能要求:
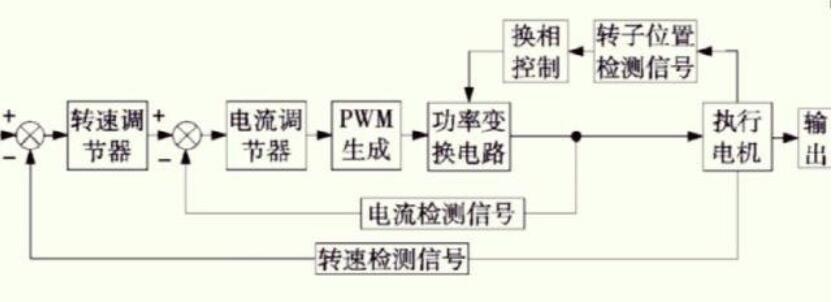
a.位置控制模式,追蹤成圈機(jī)收線輪的速度,以達(dá)到速度同步和電纜密度的要求;
b.速度切換功能,30圈為一周期并預(yù)留出線孔位置。
3.控制方案及調(diào)試說明:
成圈機(jī)收線輪用的是歐陸514系列2.2kW變頻,主要做成圈機(jī)收線輪調(diào)速作用,擺桿用的威科達(dá)VB系列伺服驅(qū)動(dòng)器,控制擺桿電機(jī),根據(jù)成圈機(jī)收線輪的編碼器給定信號(hào)和擺桿電機(jī)的編碼器反饋信號(hào)進(jìn)行調(diào)節(jié)速度,來保持?jǐn)[線和收線的同步,通過圈數(shù)檢測光電開關(guān),來切換速度,保持出線孔的位置。
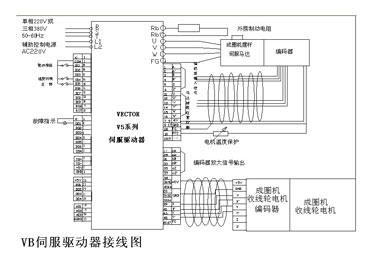
威科達(dá)VB系列伺服具體的調(diào)試參數(shù)說明:(擺桿電機(jī))
恢復(fù)出廠值設(shè)置
以下將介紹如何執(zhí)行動(dòng)作,并且每臺(tái)新的驅(qū)動(dòng)器都必須執(zhí)行此操作:
1. 驅(qū)動(dòng)器接上電源后,通電。
2. 設(shè)定 F.094=249。
3. 按兩次 PAR 鍵,然后按 RESET 鍵;執(zhí)行復(fù)位動(dòng)作。
4. 驅(qū)動(dòng)器會(huì)自動(dòng)重置兩次。
如此即完成驅(qū)動(dòng)器重置的動(dòng)作,參數(shù)恢復(fù)了出廠值。
驅(qū)動(dòng)器與伺服馬達(dá)的自學(xué)習(xí)
在自學(xué)習(xí)前,請先開放 FR/W 資料設(shè)定(即設(shè) F.095=0 和 F.096=1)。
H.450~H.499 為永磁式無刷伺服馬達(dá)參數(shù)。(自學(xué)習(xí)時(shí)馬達(dá)應(yīng)脫開負(fù)載)。
1 永磁式無刷伺服馬達(dá)的自學(xué)習(xí)
自學(xué)習(xí)前必須首先手動(dòng)設(shè)定以下參數(shù):
1. 設(shè)定馬達(dá)額定轉(zhuǎn)速 H.460(rpm)。
2. 設(shè)定馬達(dá)額定電流 H.461=(馬達(dá)額定電流/驅(qū)動(dòng)器額定電流)×100%。
3. 設(shè)定馬達(dá)繞線方向 H.492=1;
4. 設(shè)定 H.094=235。
5. 執(zhí)行軟件或者硬件復(fù)位,開始自學(xué)習(xí)。
自學(xué)習(xí)作業(yè)過程中,驅(qū)動(dòng)器將自動(dòng)檢測馬達(dá)特性并自動(dòng)設(shè)定相關(guān)的馬達(dá)參數(shù)。
1. H.452 編碼器(Encoder)的每轉(zhuǎn)脈沖數(shù)(PPR) 。
2. H.453 正轉(zhuǎn)時(shí)A相領(lǐng)先或落后B相。
3. H.457 馬達(dá)額定電壓(馬達(dá)額定電壓/輸入電壓)。
4. H.458 馬達(dá)最大電壓(和H.457相同)。
5. H.459 轉(zhuǎn)矩提升電壓設(shè)定為0。
6. H.462 馬達(dá)最大電流設(shè)定為100%。
7. H.463 激磁電流設(shè)定為0。
8. H.464 馬達(dá)極數(shù)。
9. H.465 馬達(dá)最高容許轉(zhuǎn)速設(shè)定。
10. H.466 馬達(dá)最低容許轉(zhuǎn)速設(shè)定為0rpm。
11. H.467 馬達(dá)滑差速設(shè)定為0。
12. H.470 電流控制回路的比例增益。
13. H.471 電流控制回路的積分增益。
14. H.473 速度控制回路的比例增益。
15. H.474 速度控制回路的積分增益。
2 以位置控制模式運(yùn)轉(zhuǎn)
設(shè)定 F.094=233,再執(zhí)行復(fù)位動(dòng)作,CPU 自動(dòng)設(shè)定下列參數(shù):
F.188=3 選擇馬達(dá)參數(shù)組別#3(H.450~H.499)
H.450=3 選擇永磁式無刷伺服馬達(dá)閉回路控制
H.480=1 選擇位置控制模式
H.481=1 選擇由XY脈沖輸入控制的追蹤模式
F.000=500 預(yù)設(shè)速度=500rpm
F.130=0 選擇四倍率XY脈沖輸入
F.133=1000 XY脈沖信號(hào)乘率系數(shù)=1000
F.134=1000 XY脈沖信號(hào)除率系數(shù)=1000
連接 DI1 至 COM 啟動(dòng)驅(qū)動(dòng)器。
按鍵盤的 FWD 鍵, 驅(qū)動(dòng)器接收 XY 脈沖信號(hào),馬達(dá)速度﹑方向由 XY 脈沖信號(hào)決定。
修改 F.133、F.134,觀察脈沖信號(hào)的影響。
然后在設(shè)定速度切換端子F 144=65,來切換2段速度的比例系數(shù),以達(dá)到預(yù)留孔的位置。
通過現(xiàn)場調(diào)試實(shí)驗(yàn)證明, 匣式成圈機(jī)擺桿使用深圳威科達(dá)VB系列伺服驅(qū)動(dòng)器后,電纜繞線的密度排列均勻,孔位精確,繞線的速度也有所提高,完全符合匣式成圈機(jī)的工藝要求。
-
驅(qū)動(dòng)器
+關(guān)注
關(guān)注
53文章
8264瀏覽量
146716 -
plc
+關(guān)注
關(guān)注
5014文章
13351瀏覽量
464486 -
變頻器
+關(guān)注
關(guān)注
251文章
6574瀏覽量
145404
發(fā)布評論請先 登錄
相關(guān)推薦
注塑型伺服驅(qū)動(dòng)器在注塑機(jī)中的應(yīng)用
伺服驅(qū)動(dòng)器品牌故障維修實(shí)例
伺服驅(qū)動(dòng)器的工作原理_伺服驅(qū)動(dòng)器內(nèi)部結(jié)構(gòu)
伺服驅(qū)動(dòng)器可以和不同品牌或規(guī)格的伺服電機(jī)一起使用嗎
伺服驅(qū)動(dòng)器簡介
伺服驅(qū)動(dòng)器是什么?
伺服驅(qū)動(dòng)器的簡介
伺服控制系統(tǒng)和伺服驅(qū)動(dòng)器的區(qū)別
伺服驅(qū)動(dòng)器的常見接線方法
伺服驅(qū)動(dòng)器工作原理圖





 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評論