 以DSP TMS320F2812為核心的ATV-ATT中控系統設計
以DSP TMS320F2812為核心的ATV-ATT中控系統設計
為有效應對突發性、規模性的恐怖暴力事件,非致命性防暴武器的研制越來越受到各國的重視,研制以高機動性的ATV作為武器平臺的防暴武器系統對提高反恐作戰能力具有重大意義,而現代化的控制系統又使得整個武器系統更加可控化,智能化。因此,這里提出一種基于DSP的ATV-ATT中控系統設計方案。該設計是以DSP TMS320F2812作為控制核心,通過手柄控制武器裝置的俯仰運動和回轉運動,以及通過按鍵方式控制其徽動、測距、自動瞄準和發射模式設定等前期準備工作,當操作人員按下射擊按鈕后,武器控制系統根據所設定條件自動形成允許發射信號,隨后武器就被發射或投放出去。同時系統帶有自檢及存彈檢測功能。
1 系統設計方案
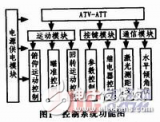
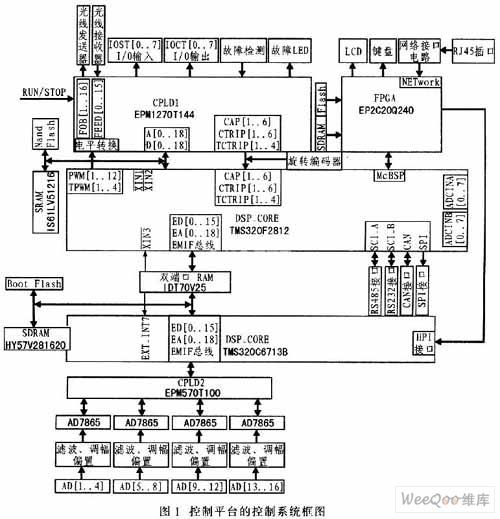
全地形反恐防暴武器系統ATV-ATT中控系統的功能主要是完成對武器系統運動、測距、瞄準、發射等一系列控制,如圖1所示,該系統包括3大模塊:運動模塊、按鍵模塊和通信模塊。
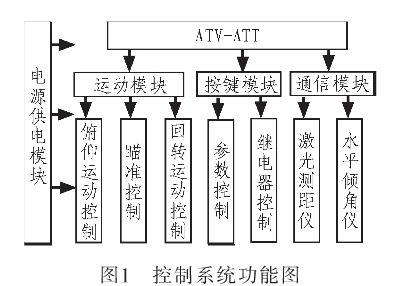
圖1:控制系統功能圖
1.1 運動控翻模塊
在控制系統中,通過手柄操縱桿控制發射裝置的俯仰運動和回轉運動。手柄可以等效成兩個獨立的電位器,模擬電壓的范圍在0~3 V,符合A/D轉換模塊的采集電壓范圍,經過DSP(TMS320F2812)的A/D轉換和事件管理器(EV)的PWM波形生成,分別輸出兩路PWM波形控制步進電機(90BYG3502)轉速,而方向則通過DSP強大的IO端口輸出高低電平信號來控制,此信號為高電平時電機為順時針旋轉,低電平時則為反方向逆時針旋轉。但由于DSP的輸出信號的電壓幅值在0~3.3 V之間,不能滿足步進電機驅動器(MSa-3H090M)的信號幅值范圍,因此將這4路信號經過升壓驅動電路后傳送到電機驅動器,進而實現對電機的控制。
同時系統中還有瞄準功能,激光測距儀與視頻成像儀的光軸共軸,當視頻成像儀在屏幕中顯示的瞄準點指向目標時,按下測距按鍵即可觸發激光測距儀測距信號,DSP根據當前狀態下水平傾角儀兩垂直軸與水平面的夾角,經過特定的算法,計算出發射狀態下兩方向位移,DSP給出電機驅動信號驅動電機,并實時比對傾角儀的讀數,達到計算值允許的閾值范圍內,即認為瞄準完成可進行發射。
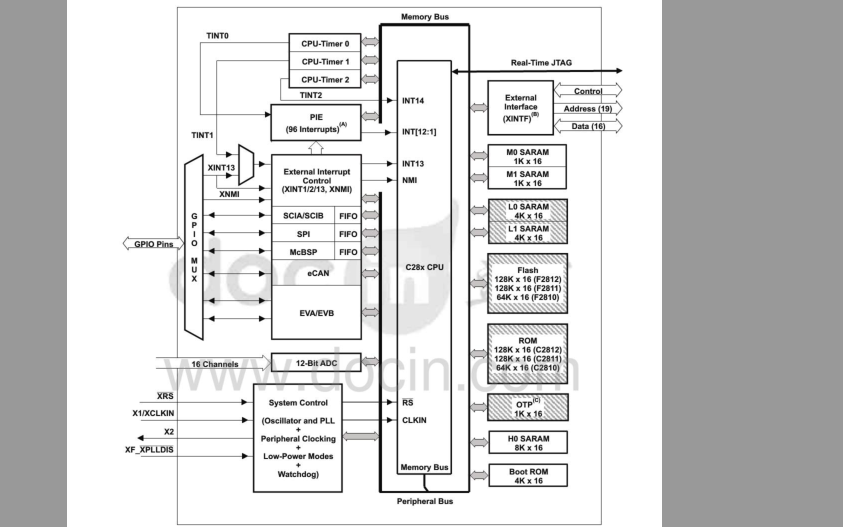
DSP TMS320F2812是一種低功耗的32位定點數字信號處理器。除具有一般DSP的優點外,它還采用高性能靜態CMOS技術,電壓從5 V降為3.3 V,內核電壓降為1.8 V,減少了功耗。指令執行速度最高150 MHz,幾乎所有指令都可在6.67 ns的單周期內完成。該芯片還具有大量外設資源,如A/D轉換、定時器、各種串口(同步和異步),看門狗、CAN總線/PWM發生器、數字IO腳等。因此選用DSP TMS320F2812作為系統控制器。
1.2 按鍵模塊
參數控制包括微動按鍵的控制和2種發射模式按鍵控制,按下測距按鍵可以改變DSP中脈沖頻率,利用手柄對發射裝置進行細微控制。發射模式按鍵控制DSP相應參數,使武器按照既定發射模式發射。發火機構通過繼電器來控制,本設計中采用GTJ8-8A型固態繼電器,發射按鍵經DSP的通用IO端口向繼電器提供控制信號,48 V作為激發電壓進行點火,從而實現發射過程。
1.3 通信模塊
TMS320F2812器件包含了串行通信接口SCI模塊。該SCI模塊帶有與RS-232標準一致的異步串口,使得TMS320F2812可以方便地與其他使用標準格式的異步外設進行數據通信。在本設計中通信子系統就是通過標準RS-232串口完成DSP與水平傾角儀,激光測距儀和視頻成像儀之間的數據通信控制。
2 系統硬件設計
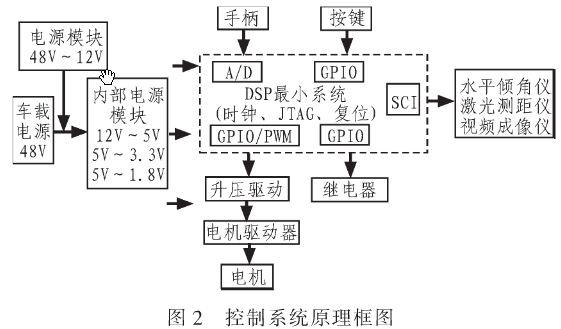
圖2:控制系統原理圖
圖2為該系統設計的原理框圖,這里主要給出升壓驅動電路和電源電路的設計。
升壓驅動電路采用三極管放大電路的基本原理:集電極電流受基極電流的控制,并且基極電流很小的變化,會引起集電極電流很大的變化,且變化滿足一定的比例關系。這里選用NPN型硅三極管,將從DSP輸出的3.3 V的兩路方向信號和兩路脈沖信號分別升壓至5 V,從而驅動電機驅動器,如圖3所示。
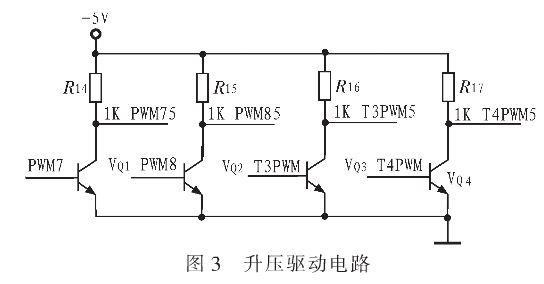
圖3:升壓驅動電路
電源是整個系統的能源中心,系統電源電路的性能在很大程度上影響到DSP系統的穩定性。直流電源的輸入為48V的車載電瓶,采用SPD75 -XXS12型寬電壓恒流穩壓電源模塊,將48 V電壓轉為恒定的12 V直流電壓,進而為中控板、水平傾角儀和激光測距儀等供電。
中控板12 V直流輸入,采用12S05轉換為+5 v直流電源。而內部各器件的工作電源除+5 V外還有數字+3.3V、模擬+3.3V以及數字+1.8V。為此,專門設計了中控板內部電源模塊,用以實現將+5 V的電壓轉換為各器件工作所需的幾種電壓。這里采用了兩片LMlll7將+5 V分別轉換為+3.3 V和+1.8 V的輸出電壓。為了避免數字電源對模擬電源的噪聲干擾,通過電感將二者隔離,如圖4所示。
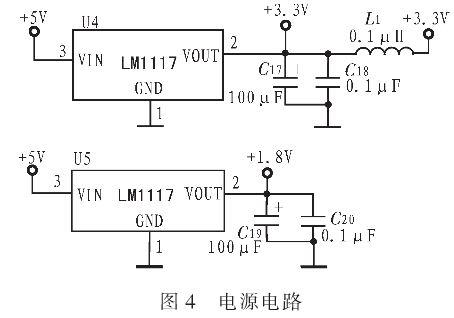
圖4:電源電路圖
3 系統軟件設計
控制系統的軟件采用C語言編寫,軟件主要由主程序、串口中斷子程序和A/D轉換中斷子程序組成。主程序用于TMS320F2812型DSP的初始化、控制指令與參數的轉化與輸入,步進電機驅動信號的生成。串口中斷子程序用于實現接收來自水平傾角儀和激光測距儀的信息及向其發出控制指令。A/D轉換中斷子程序用于實現接收手柄電位器反饋來的電壓變化并將其轉化為數值。軟件執行流程如圖5所示。
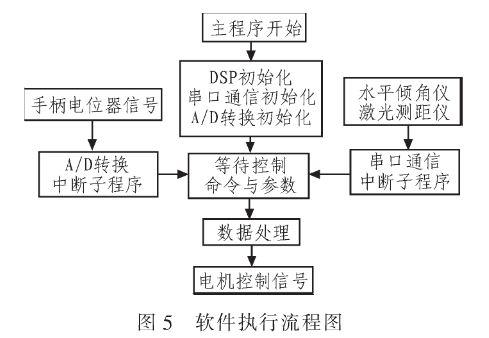
圖5:軟件執行流程圖
4 系統調試結果
將元器件焊接在電路板上,檢查無虛焊漏焊的焊點,測量電源是否有焊接短路現象,確保板子的電源供電正常,各個模塊間的連線正確,如圖6所示。
圖6:電路板實物圖
圖7所示為燒寫好程序的系統連接圖,經過調試,程序運行完好,武器系統可以實現90°回轉方向運動,60°內高低方向運動以及通過按鍵方式控制其微動、激光測距、自動瞄準和發射模式設定,自檢及存彈檢測等一系列的功能要求。
圖7:系統硬件連接圖
5 結束語
本文對某ATV-ATT車載武器控制系統的設計方案進行了闡述。按照系統功能不同,分別介紹各個模塊電路。根據硬件設計的基本原則,選擇了合適的器件和參考電路,然后對硬件電路進行了分析和設計,解決了升壓驅動,電源供電等難題,最后通過調試安裝,系統的實際運行,驗證了本設計運行穩定,達到了應用目標。
-
處理器
+關注
關注
68文章
19349瀏覽量
230296 -
驅動器
+關注
關注
53文章
8259瀏覽量
146629 -
控制系統
+關注
關注
41文章
6639瀏覽量
110695 -
步進電機
+關注
關注
150文章
3114瀏覽量
147611
發布評論請先 登錄
相關推薦
基于TMS320F2812的光電色選系統介紹
定點DSP芯片TMS320F2812實現快速算法應用
TMS320F2812原理與開發
基于TMS320F2812的控制系統設計
基于TMS320F2812的車輛動態稱重系統設計
基于CPLD的TMS320F2812硬件平臺設計
TMS320F2812程序的遠程升級方法

采用TMS320C6713B與TMS320F2812實現大功率變流器通用控制平臺的設計
TMS320F2812系列DSP的中文數據手冊





 工商網監
工商網監
評論