") 采用西門子S7—300系列PLC和變頻器實現(xiàn)熄焦車控制系統(tǒng)的設計
采用西門子S7—300系列PLC和變頻器實現(xiàn)熄焦車控制系統(tǒng)的設計
1、引言
現(xiàn)場總線技術是20世紀8O年代中期在國際上發(fā)展起來的一種新技術,是當今自動化領域技術發(fā)展的熱點之一。在各種現(xiàn)場總線技術中,PROFIBUS是一種非常有代表性的國際性開放式現(xiàn)場總線技術,應用它可以將可編程控制器、交直流驅(qū)動器、監(jiān)控計算機、遠程I/O及智能傳感器等連接起來,實現(xiàn)分布式I/O控制,可提高檢測和控制精度,改善系統(tǒng)的動態(tài)響應速度,提高系統(tǒng)的安全性。
PROFIBUS有三種實現(xiàn)形式, 即PROFIBUS—FMS、PROFIBUS—PA 、PROFIBUS—DP,分別應用于不同的控制場合,其中PROFmUS—DP主要用于現(xiàn)場級的高速數(shù)據(jù)傳輸,完成自動控制系統(tǒng)(如PLC、PC等)通過高速串行總線與分散的現(xiàn)場設備(I/O、驅(qū)動器、閥門等)之間的通信任務。它適于在工業(yè)現(xiàn)場環(huán)境中運行,性能可靠、造價低廉,抗干擾能力強。
本課題組根據(jù)馬鋼煤焦化公司熄焦車系統(tǒng)的控制要求和特點,以能使系統(tǒng)適應現(xiàn)場的惡劣工作環(huán)境穩(wěn)定運行且便于操作和維護,能使系統(tǒng)的控制方式簡單合理且具有較高自動控制水平為目的,提出采用PROFIBUS-DP現(xiàn)場總線技術構成分布式控制系統(tǒng)、采用西門子公司S7-300型PLC作為主控單元、采用西門子SIOVERTMASTERDRIVES 6SE7系列全數(shù)字矢量型變頻調(diào)速裝置控制交流電機作為系統(tǒng)的主傳動裝置來構成熄焦車控制系統(tǒng),完成干式熄焦車系統(tǒng)的各項控制任務。
2 、工藝概況及控制要求
馬鋼煤焦化公司干熄焦系統(tǒng)的熄焦車由電機車、車箱和車載旋轉(zhuǎn)焦罐構成。熄焦車沿軌道行駛,往返于焦爐和熄焦塔之間,可接收任一指定碳化室的紅焦,并將其運往熄焦塔熄焦。熄焦車為大型移動機械設備,滿載時每車均重200噸,整個運行過程環(huán)境惡劣,且控制精度要求高,控制關系復雜。
熄焦車系統(tǒng)具體控制要求如下:
(1)系統(tǒng)各電機作到無級調(diào)速,并實現(xiàn)軟起動、軟停車。
(2)熄焦車可在0~3m/s速度范圍內(nèi)按工藝要求的任意速度行駛。在遠離目標位時高速行駛,在接近目標位時按預定曲線減速,自動對位停車,定位精度為± 10cm。
(3)車載旋轉(zhuǎn)焦罐在接紅焦時,按工藝要求以10 r/min速度旋轉(zhuǎn)。接焦完畢,按預定曲線減速, 自動對位停在工藝要求的指定角度。定位精度為±10cm。
(4)系統(tǒng)能夠?qū)崿F(xiàn)與其它相關設備間的聯(lián)鎖控制和各種信息傳輸。
3、 控制系統(tǒng)硬件配置
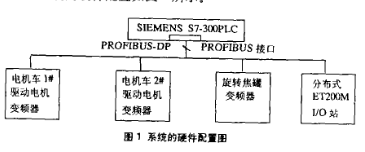
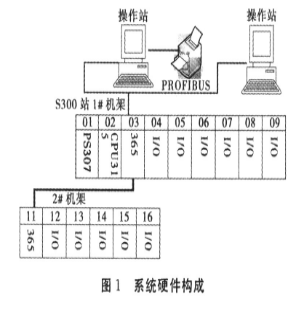
控制系統(tǒng)的硬件配置如圖1所示。
3.1 系統(tǒng)主站
主站為西門子S7—300型PLC,其主要部件包括307— 1EA00-0AA0型電源模塊、帶DP通訊接口的315—2AEO3—0AB0型CPU模塊、321-1FF01—0AA0型輸入模塊、322-1HH00-0AA0型輸出模塊。它負責在各預定周期內(nèi)利用PROFmUS—DP網(wǎng)絡與從站進行信息交換,將控制數(shù)據(jù)傳送到各個從站,并且讀取從站的狀態(tài)信息,實現(xiàn)系統(tǒng)復雜的過程及邏輯控制。如主站通過網(wǎng)絡將控制命令和頻率給定值傳送給變頻器;讀取變頻器的啟停狀態(tài)、運行頻率、報警信息等信息,在主站中進行處理。從圖1可以看出,PLC主站控制對象為三臺變頻器和一臺分布式I/O。
3.2 系統(tǒng)從站
系統(tǒng)從站分為兩類:一類為變頻器,一類為分布式I/O從站。
(1)變頻器
系統(tǒng)的各變頻器 方面作為系統(tǒng)從站響應來自主站的各種指令,同時實時返回電機運行狀態(tài)信息;另一方面,實現(xiàn)對與其相連電機的運行控制,使電機依據(jù)實際需要處在最佳工作狀態(tài)。這樣變頻器就在主站的控制下,根據(jù)負載運行情況恰當?shù)卦O置加、減速時間等參數(shù),實現(xiàn)設備的軟起動、軟停車和準確定位等動作。同時由于電機拖動大慣性負載經(jīng)常需要進行制動或停機操作,系統(tǒng)還配備了制動單元來協(xié)助變頻器控制電機運行。
(2)ET200M 分布式I/O 從站
由于大量I,O 設備分布在現(xiàn)場,且距主站較遠,直接連接非常不方便,系統(tǒng)配置了ET200M 模塊來解決上述問題。安裝在現(xiàn)場的ET200M 分布式I/O站最大限度地降低了信號傳輸電纜的數(shù)量,有效地簡化了現(xiàn)場布線復雜性。
3.3 網(wǎng)絡介質(zhì)
本系統(tǒng)現(xiàn)場總線網(wǎng)絡采用屏蔽雙絞線連接,抗干擾能力強且造價低廉。網(wǎng)絡的接口為基于雙絞線的ETARS485協(xié)議接口,通訊方式采用收發(fā)輪流進行的半雙工方式。其發(fā)送器和接收器均以差分方式工作,每個信號用兩根導線傳輸。無需公用信號,信號電平由兩根導線的差值表示,線問及外界干擾大大削弱,具有高的抗共模干擾能力,保證了網(wǎng)絡傳輸可靠。
4、 系統(tǒng)控制軟件
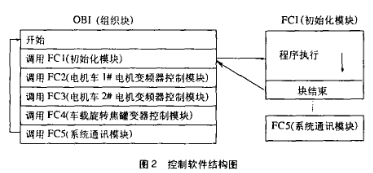
控制軟件結構如圖2所示。
4.1 系統(tǒng)控制軟件的結構化編程方式
系統(tǒng)控制軟件的編制用S ATIC S7-30o語言完成,采用結構化編程方式編制。即將系統(tǒng)復雜的自動控制任務分解成為能夠反映系統(tǒng)工藝,功能的若干子任務,即分解為初始化任務,電機車1靜電機變頻器控制任務、電機車 電機變頻器控制任務,車載旋轉(zhuǎn)焦罐變頻器控制任務、系統(tǒng)通訊任務,再分別對各子任務編制相應的控制程序模塊如圖2所示,最后創(chuàng)建組織塊OB1,形成模快化結構程序。
在程序運行時,PLC連續(xù)循環(huán)執(zhí)行組織塊OB1,在OB1中調(diào)用相應的程序塊,在其下載到CPU后,PLC就循環(huán)掃描執(zhí)行這些程序。
4.2 系統(tǒng)自動定位停車控制算法
系統(tǒng)中的熄焦車和車載旋轉(zhuǎn)焦罐設備均有自動定位停車的控制要求。本課題組采用最優(yōu)控制思想并結合系統(tǒng)各種約束條件設計出設備的優(yōu)化運行模型。每一運行周期,PLC控制器依據(jù)優(yōu)化運行模型計算出該次定位停車過程控制指令的期望值,并通過對設備運行過程中實際速度和距目標位距離等現(xiàn)場參數(shù)的分析,給出控制指令的修正值,控制器最終輸出到傳動系統(tǒng)的控制指令為Uo-Ur=△ U。
該算法能有效提高定位精度, 且簡單、適應性強。
4.3 系統(tǒng)數(shù)據(jù)通訊
系統(tǒng)的現(xiàn)場設備與PLC之問通過PROFmUS-DP總線可以完成數(shù)據(jù)的讀寫和過程數(shù)據(jù)的傳輸,如控制字,狀態(tài)字,給定值和實際值等。
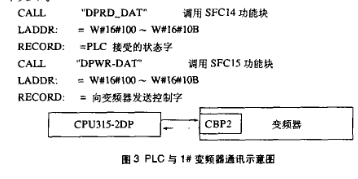
本系統(tǒng)主站核心模塊CPU315-2DP具有PR0FmUS-DP接口,無需另外的通訊接口單元。借助于CBP2通訊接口板,變頻器通過PR0FmUS-DP現(xiàn)場總線與S ATIC S7-30o可編程控制器連接。在編程軟件STEP7中完成硬件網(wǎng)絡組態(tài),為變頻器分配網(wǎng)絡地址。該地址必須與變頻器CBP2板中設置的相同,在PLC程序組織塊OBI中選用SFC14 “DPRD—DAT” , SFC15“DPWB_DAT”系統(tǒng)功能塊向變頻器的CBP2模塊讀取,發(fā)送數(shù)據(jù)。
以電機車1#變頻器為例,如圖3所示,其控制字單元FO地址從W靜1礎100(n)到W靜1礎10B(H),因此可進行12個字節(jié)的讀取,寫入 調(diào)用系統(tǒng)功能塊SFC15,可把PLC應用程序“1#行走數(shù)據(jù)”塊中從DB11.DBX0.0開始的12個字節(jié)的內(nèi)容寫入1#變頻器的控制存儲單元,包括初始化控制字,運行方向控制字、當前速度給定控制字、變頻器使能控制字等,控制變頻器運行。調(diào)用系統(tǒng)功能塊SFC14,可把1#變頻器的電機轉(zhuǎn)速實際值等狀態(tài)字讀入“1#行走數(shù)據(jù)”塊從DBII.DBX12.0開始的12個字節(jié)的單元中。
5、 結束語
本控制系統(tǒng)應用PROFmUS-DP總線技術實現(xiàn)分布式控制,使現(xiàn)場布線的復雜性有效簡化,不僅節(jié)省大量電纜及敷設費用,而且調(diào)試維護簡單方便,大大提高了系統(tǒng)的實用性、可靠性和開放性,充分體現(xiàn)了現(xiàn)場總線技術的優(yōu)越性。系統(tǒng)目前已投入試運行,工程實踐證明,達到了預期的控制要求,控制精度高,運行穩(wěn)定,抗干擾能力強。
責任編輯:gt
-
控制系統(tǒng)
+關注
關注
41文章
6650瀏覽量
110755 -
plc
+關注
關注
5016文章
13361瀏覽量
464607 -
西門子
+關注
關注
94文章
3059瀏覽量
116198
發(fā)布評論請先 登錄
相關推薦
西門子S7-200PLC與西門子變頻器MM440通訊程序?qū)嵗?/a>

西門子S7-300/400 PLC與VB的通信方法
西門子S7-300PLC應用教程
基于西門子S7-300系列PLC實現(xiàn)焦爐除塵控制系統(tǒng)的設計
西門子變頻器與S7-300/400 的PROFIBUS-DP通訊過程
西門子PLC S7-200與V80組合的位置控制系統(tǒng)簡介
西門子PLC S7-1500系列與西門子變頻器G120之間實現(xiàn)DP通訊功能
西門子S7-1200 PLC如何通過模擬量控制變頻器
西門子PLC與ABB變頻器通訊怎么實現(xiàn)
S7協(xié)議讀取西門子S7-200 Smart PLC數(shù)據(jù)

西門子PLC S7-1500系列介紹

- 設計技術
- 可編程邏輯
- 電源/新能源
- MEMS/傳感技術
- 測量儀表
- 嵌入式技術
- 制造/封裝
- 模擬技術
- RF/無線
- 接口/總線/驅(qū)動
- 處理器/DSP
- EDA/IC設計
- 存儲技術
- 光電顯示
- EMC/EMI設計
- 連接器
- 行業(yè)應用
- LEDs
- 汽車電子
- 音視頻及家電
- 通信網(wǎng)絡
- 醫(yī)療電子
- 人工智能
- 虛擬現(xiàn)實
- 可穿戴設備
- 機器人
- 安全設備/系統(tǒng)
- 軍用/航空電子
- 移動通信
- 工業(yè)控制
- 便攜設備
- 觸控感測
- 物聯(lián)網(wǎng)
- 智能電網(wǎng)
- 區(qū)塊鏈
- 新科技
- 華秋
- 關于我們
- 投資關系
- 新聞動態(tài)
- 加入我們
- 聯(lián)系我們
- 舉報投訴
- 社交網(wǎng)絡
- 微博
- 移動端
- 發(fā)燒友APP
- 硬聲APP
- WAP
- 聯(lián)系我們
- 廣告合作
- 王婉珠:wangwanzhu@elecfans.com
- 內(nèi)容合作
- 黃晶晶:huangjingjing@elecfans.com
- 內(nèi)容合作(海外)
- 張迎輝:mikezhang@elecfans.com
- 供應鏈服務 PCB/IC/PCBA
- 江良華:lanhu@huaqiu.com
- 投資合作
- 曾海銀:zenghaiyin@huaqiu.com
- 社區(qū)合作
- 劉勇:liuyong@huaqiu.com
-
關注我們的微信

-
下載發(fā)燒友APP

-
電子發(fā)燒友觀察



版權所有 ? 湖南華秋數(shù)字科技有限公司
長沙市望城經(jīng)濟技術開發(fā)區(qū)航空路6號手機智能終端產(chǎn)業(yè)園2號廠房3層(0731-88081133)
電子發(fā)燒友 (電路圖) 湘公網(wǎng)安備43011202000918 工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
工商網(wǎng)監(jiān)
湘ICP備2023018690號-1
評論