 采用CAN-232B智能型轉換網橋實現地面變電所模擬盤控制器的設計
采用CAN-232B智能型轉換網橋實現地面變電所模擬盤控制器的設計
1、 問題的提出
以前對井下電力負荷的監控,只能靠模擬電表來指示。現在可以采用計算機控制與管理,用模擬盤顯示井下負荷的動態工作情況。可以借助CAN-232B智能型轉換網橋和模擬盤控制器來實現這些。
CAN-232B智能型轉換網橋,用于PC或其他帶RS 232端口的設備與CAN設備之間的通訊CAN(Controller Area Network)是一種串行總線系統。CAN擁有高傳輸速度(高達1 Mb/s)和高可靠性,能以高性能和高品質的方式實現高度可靠的監控系統。為了能在通常的RS 232設備上使用CAN網絡,CAN-232B設計成將RS 232的串行幀重新打包為CAN擴展幀,并通過CAN收發器發送到CAN總線上;反之,如果CAN-232B的收發器收到CAN總線上的數據幀,而且通過了驗收碼校驗,它就會把CAN幀拆包,并將其中的數據發到RS 232口上,因此它可以在CAN與。RS 232之間精確地轉換信息。
CAN-232B有2種工作模式:設置模式和工作模式。在設置模式下,用戶可對它的參數進行設置。而在工作模式中,它完成上述的協議轉換。CAN-232B特別適合小流量的CAN-bus數據傳輸應用,最高可達300幀/s的數據傳輸速率。
CAN-232B采用表面安裝工藝,板上自帶光電隔離模塊,在控制電路和CAN電路之間實現完全電氣隔離。CAN-232B也采用防雷設計,每線提供600 W的抗雷擊承受力,加上獨立的DC/DC電源,這樣的三保險設計使CAN-232B具有很強的抗干擾能力,大大提高系統在惡劣環境中使用的可靠性。
2、 模擬盤控制器的功能
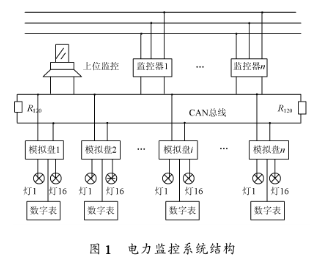
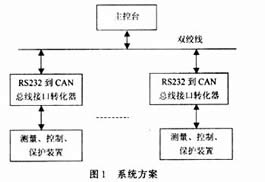
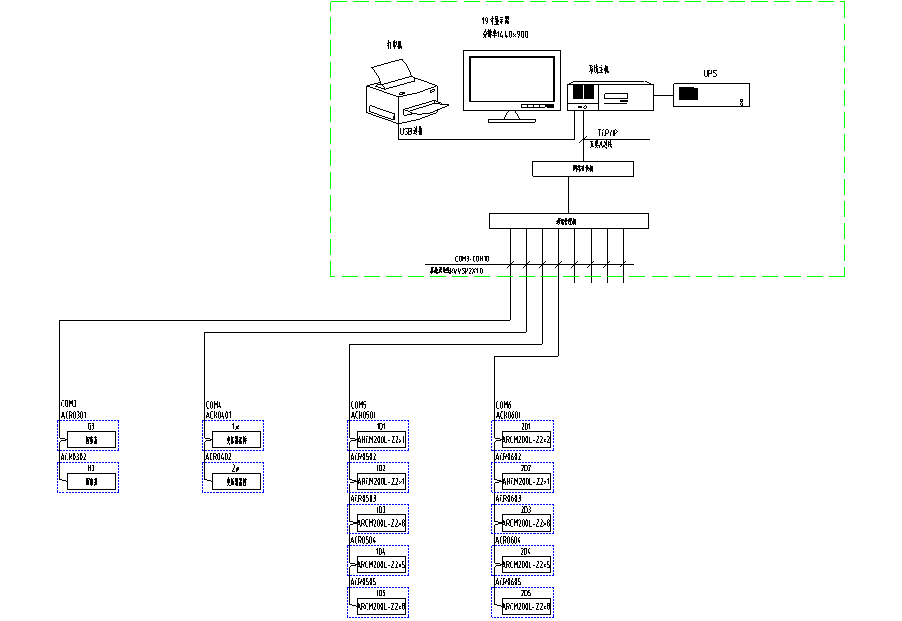
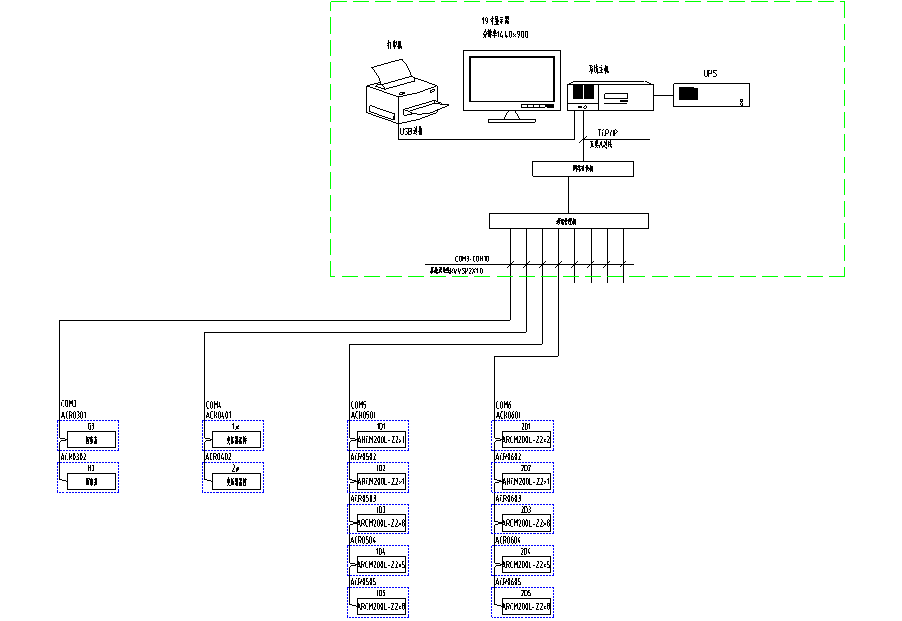
電力監控模擬盤設于地面變電所,主要用于低電壓等級供配電系統的計算機監測與控制。在供電系統的每條配電回路中安裝1臺監控器,通過CAN總線通信網絡與現場控制站及中央控制站共同形成一個供配電計算機監控與管理系統。
模擬盤控制器是電力監控系統的顯示部分,在現場中的監控器采集到回路的模擬量、開關量,并將這些數據根據CAN總線通訊協議轉化成可傳送的數據幀格式發送到CAN總線上。模擬盤控制器一直“掛”在CAN總線上,當CAN總線上有數據時,模擬盤控制器利用接受中斷程序接收這些數據幀,并根據CAN總線的通信協議將數據幀還原成相應數據發送到自身所攜帶的指示燈或數字表上進行顯示。當調度端主機發出遙控合閘或遙控選線命令,模擬盤控制器根據CAN總線協議將命令轉化成可傳送的數據幀格式,利用發送中斷程序傳送到CAN總線上,現場相應的開關接受到命令后進行相應的動作。
3、 模擬盤控制器的硬件設計
3.1 硬件電路設計
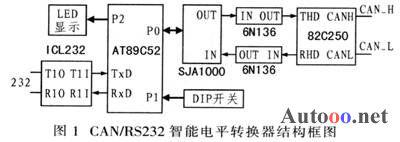
模擬盤控制器的硬件電路主要由:P8XC592單片機、1232看門狗、RAM數據存儲器6264、ROM程序存儲器27C256、CAN控制器接口PC:82C250,RS 485通訊、光電耦合器6N137、光隔等構成。
P8XC592單片機為整個硬件電路的核心,由Philips公司開發生產的,適用于自動和通用工業應用的8位高性能微控制器。它在80C51標準特性基礎上增加了一些重要的硬件功能,如與內部RAM進行DMA數據傳送的CAN控制器;具有總線故障管理功能的1 Mb/s CAN控制器;與標準80C51兼容的全雙工UART等。
P8xC592共有68個管腳,其中P0~P3與80C51相同,并行I/O口P4的功能與P1,P2和P3相同。P5口主要用作A/D變換器的模擬量輸入端。P0~P3還可完成下列功能:PO為擴展P8XC592標準存儲器和外部設備提供用作分時復用的低8位地址和數據總線;P1可作為外部中斷請求輸入端、外部計數器輸入端、外部計數器復位輸入端和CAN接口的CTX0和CTX1輸出端;P2當擴展P8XC592標準存儲器和外部設備提供用作分時,提供高8位地址;P3引腳可分別進行配置以提供外部中斷請求輸入端、計數器輸入端、串行口UART的接收輸入端和發送輸出端以及外部數據存儲器的讀和寫控制信號。
本設計利用P0,P2口作為外部存儲器的高、低位輸出端,P1.0端為模擬盤控制器的外部巡檢操作端,P1.1為閃光解除操作端口,P3.0,P3.1,P3.2為RS 485通訊操作端口,P3.3用于看門狗復位,P3.4,P3.5用于P0輸出高低位的選通,P3.6,P3.7用于控制外部存儲器的讀寫。在程序設計中采用外部存儲單元,數據存儲器6264,程序存儲器27C256。采用74HCl73進行數據的高、低位的位選。
3.2 硬件電路的抗干擾設計
為了增強CAN總線節點的抗干擾能力,P80C592芯片的CTX0和CRX0并不直接與82C250的TXD和RXD相連,而設計為通過高速光耦6N 137后與82C250相連,這樣就很好地實現了總線上各CAN節點間的電器隔離。光耦部分電路所采用的2個電源完全隔離,這樣可以提高節點的穩定性和安全性,否則采用光耦就失去了意義。
82C250與CAN總線的接口部分也采用了一定的安全和抗干擾措施。82C250的CANH和CANL引腳各自通過1個5 Ω的電阻與CAN總線相連,電阻可起到一定的限流作用,保護82C250免受過流的沖擊。CANH和CANL與地之間并聯2個30 pF的小電容,起到濾除總線上的高頻干擾和一定的防電磁輻射的能力。
另外芯片P80C592并不直接與輸出電路相連。它們之間被光隔相隔離。當外界電路因干擾或者發生故障導致電路運行參數突變時,芯片會因光隔的存在而免受影響,從而保證芯片P80C592的安全運行。以上的各種措施使單片機P80C592完全與外界相隔離,在一個相對獨立的環境中運行,保證了系統的穩定性和抗干擾能力。
4、 模擬盤控制器的軟件設計
4.1 模擬盤控制器主程序設計
在電力監控系統中,每個監控器監控一個開關狀態,監控器通過CAN總線與模擬盤控制器相連,模擬盤控制器自身攜帶16個指示燈,并通過RS 485通訊卡與一個數字表頭相連(見圖1)。16個指示燈與監控器監控的16個開關狀態相映射,通過指示燈不同狀態來折射開關量的狀態:本文定義了指示燈顯示的3種狀態:紅色、紅快閃、紅慢閃。其中指示燈為紅色代表開關為正常的工作狀態;指示燈為紅快閃,表示開關為事故跳閘——報警狀態;指示燈紅慢閃為巡檢狀態;數字表頭則用來顯示監控器采集到的模擬量值。在模擬盤控制器的軟件設計中,通過定時器來操作指示燈的閃爍快慢,根據模擬盤通信協議對P4口各端口進行相應的置位、復位,實現指示燈的現實操作。
4.1.1 初始化
初始化包括:有關的RAM單元清零、定時中斷初始化、CAN總線初始化、RS 485通訊初始化。
在中斷初始化時,要注意對中斷允許寄存器IEN0、IEN1的置位,尤其是IEN0.7總允許/禁止中斷控制的置位;通過對中斷優先級特出功能寄存器IP0,IP1來設定各中斷源的優先級。
4.1.2 巡檢操作
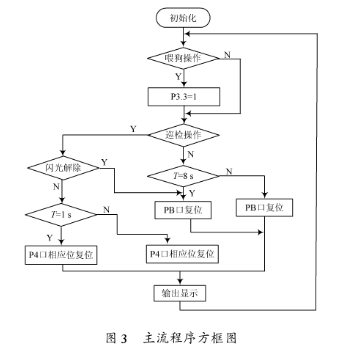
實際操作系統中,設備常時間運行會出現老化、反映不靈敏的情況。為了防止模擬盤控制器硬件電路以及指示燈本身的故障而導致顯示狀態不能緊跟開關狀態變化,本文設計了巡檢操作,由P8XC592單片機的P1.0來控制。操作員置位P1.0時,軟件程序對P4口所有的位以8 s為周期進行置位、復位操作(見圖3),模擬盤控制器開始巡檢操作,模擬盤控制器的16路指示燈同時出現“紅慢閃”狀態,如果有1路或幾路指示燈不進行“紅慢閃”,則說明相對應的指示燈出故障,操作員可有針對性的排除故障;操作員復位P1.0時,程序進入到下一步操作——事故報警操作。
4.1.3 事故閃爍、解除
在實際操作中開關由于事故出現跳閘,監控器監測到后將信息通過CAN總線傳送到模擬盤控制器上。模擬盤控制器根據通訊協議判斷出那個開關量跳閘,然后對P4口的相應位以1 s為周期進行置位、復位操作,指示燈相應的位則進行“紅快閃”。且指示燈的快閃狀態持續到事故跳閘處理。
操作員根據模擬盤上的指示處理相應的跳閘事故后,給模擬盤發出解除命令,指示燈的事故閃爍停止,進入常態工作。
4.2 模擬盤通信協議及其中斷服務程序設計
4.2.1 模擬盤通信協議
CAN協議的一個最大特點是廢除了傳統的站地址編碼,而代之以對通信數據塊進行編碼。采用這種方法的優點可使網絡內的節點個數在理論上不受限制,數據塊的標識碼可由11位或29位二進制數組成,因此可以定義2或2個不同的數據塊。數據段長度最多為8個字節,可滿足通常工業領域中控制命令、工作狀態及測試數據的一般要求。同時,8個字節不會占用總線時間過長,從而保證通信的實時性。CAN協議采用CRC檢驗并可提供相應)的錯誤處理功能,保證了數據通信的可靠性。
基于CAN總線通信協議制訂了模擬盤控制器的通信協議。
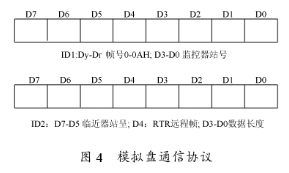
CAN總線傳輸數據由2數據幀組成:在ID1中,D7~D4為傳輸數據的幀號;幀號代表傳輸數據為何種命令;監控器的站號由ID1中的D3~D0和ID2中的D7~D5共7位128種組合;可對應128個監控器監測的開關狀態;ID2中的D4表示是否為遠程幀ID2中的D3~D0表示數據的長度。
CAN總線此協議首先充分利用了CAN通信協議自身的特點,在幀格式的ID號中體現發送的運行數據量的幀號和監控器的站號。幀號代表傳輸數據的類型,根據CAN總線的仲裁(CAN總線本身的ID號越小,優先權越大),可以將重要類型的數據規定為幀號較小,這樣就可保證重要數據的優先級高于其他類型的數據,程序就會優先處理這些數據。又可利用仲裁,將重要的監控器排列的站號排列得較小,這樣又可保證程序優先處理重要的監控器監控的開關狀態。
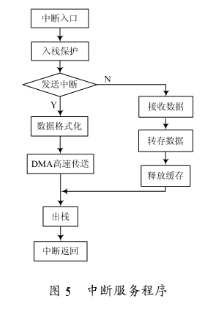
4.2.2 CAN中斷服務程序
模擬盤控制器通過中斷服務程序來受CAN總線上的數據,也是利用中斷服務程序向CAN總線上發送數據。如果有發送中斷或接收中斷請求,運行程序就會進入CAN中斷服務程序,入棧保護現場后,判斷中斷為何種中斷(發送中斷、接收中斷)。并根據CAN總線的通信協議將要發送的數據幀格式或將接收的數據幀還原,然后發送或接收數據,最后出棧進入主運行程序繼續運行。
5 、結語
本文采用國際上目前應用最為廣泛的現場總線之一CAN總線微處理器技術,進行模擬盤控制器的硬、軟件設計。通過與監控系統實際聯網進行試驗,所設計的模擬盤控制器能夠很好地實現規定的功能和技術要求。本方案在煤礦地面變電所應用表明,對煤礦井下用電情況的監視得到明顯地改善。
責任編輯:gt
-
控制器
+關注
關注
112文章
16374瀏覽量
178157 -
CAN總線
+關注
關注
145文章
1951瀏覽量
130777 -
微處理器
+關注
關注
11文章
2263瀏覽量
82472
發布評論請先 登錄
相關推薦
智能型頂板離層儀的研制與應用
正弦波電力逆變器在變電所中的應用
Link-Max CAN轉485/CAN轉232智能型CAN轉串口轉換網橋
Link-Max CAN轉485/CAN轉232智能型CAN轉串口轉換網橋
變電站與開閉所、變電所等有什么差別嗎?
CAN總線在分布式變電所自動化系統中應用
智能型RS485-CAN總線轉換器介紹

智能型數字溫度控制器的原理
變電所電能管理系統的設計和應用實例解析
變電所電能管理系統的設計和應用說明





 工商網監
工商網監
評論