") 基于YUV顏色空間的行人視頻檢測(cè)陰影去除算法的實(shí)現(xiàn)
基于YUV顏色空間的行人視頻檢測(cè)陰影去除算法的實(shí)現(xiàn)
行人是城市交通系統(tǒng)的主要參與者,保障行人安全和減少其對(duì)機(jī)動(dòng)車(chē)的干擾是城市交通系統(tǒng)建設(shè)的重要目標(biāo),因此對(duì)行人交通的研究也越來(lái)越受到重視。行人交通研究的主要問(wèn)題包括行人檢測(cè)、目標(biāo)跟蹤和行為分析。基于視頻的行人檢測(cè)與傳統(tǒng)的紅外檢測(cè)、GPS檢測(cè)、激光檢測(cè)等方法相比,具有不破壞路面、維護(hù)方便、實(shí)時(shí)性好、可檢測(cè)的參數(shù)多等優(yōu)點(diǎn),成為實(shí)時(shí)交通信息采集和處理技術(shù)的發(fā)展方向。
視頻圖像中的陰影會(huì)影響行人的檢測(cè)與跟蹤,因?yàn)殛幱暗拇嬖跁?huì)造成檢測(cè)目標(biāo)的變形、合并、甚至丟失,使得目標(biāo)定位及計(jì)數(shù)不準(zhǔn)確。近年來(lái),科研工作者對(duì)圖像中的陰影去除問(wèn)題進(jìn)行了大量研究,在這些研究方法中,考察的圖像特征主要有三種:光譜特征、空間特征和時(shí)間特征。光譜特征針對(duì)像素點(diǎn),如灰度值、顏色信息等,根據(jù)當(dāng)前圖與背景圖的色差、亮度差值等判斷像素點(diǎn)是否為陰影,或者對(duì)圖像進(jìn)行變換得到光照無(wú)關(guān)圖進(jìn)而去除陰影;空間特征是針對(duì)某一區(qū)域或某一幀圖像,根據(jù)檢測(cè)到的圖像的輪廓、紋理、邊緣等信息判斷是否為陰影,如利用圖像的輪廓特征,找到目標(biāo)與陰影的邊界線,對(duì)本體和陰影粗分,再建立陰影像素的高斯模板進(jìn)行細(xì)分,既減少了計(jì)算量又能達(dá)到較好效果;時(shí)間特征一般都是與前兩種特征結(jié)合使用,可以用于對(duì)陰影方向或運(yùn)動(dòng)速度的估算等,以進(jìn)一步提高陰影去除效果。
本文提出一種新的基于YUV顏色空間的陰影去除算法,因?yàn)楹芏鄶z像頭的輸出信號(hào)采用YUV顏色空間,與基于RGB顏色空間的處理方法相比,省去了圖像顏色空間轉(zhuǎn)換的步驟,能提高處理速度。在圖像特征上,本文結(jié)合像素點(diǎn)的光譜特征與圖像整體的空間特征,首先通過(guò)亮度差和色差對(duì)像素點(diǎn)進(jìn)行判斷,再利用目標(biāo)本體與陰影只相接不相交的空間特征,對(duì)去除結(jié)果進(jìn)行修正,使其陰影去除效果更好。同時(shí),為了使算法適應(yīng)光照、場(chǎng)景等的變化,采用模糊神經(jīng)網(wǎng)絡(luò)進(jìn)行目標(biāo)本體與陰影的分類(lèi),用遺傳算法對(duì)網(wǎng)絡(luò)參數(shù)和權(quán)值進(jìn)行自適應(yīng)調(diào)整,以提高算法的魯棒性。
1 YUV顏色空間
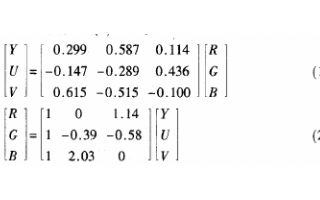
在色彩學(xué)上,為了可以準(zhǔn)確定量地描述顏色,將色彩定義為三大屬性:“Y”表示明亮度,即灰度值;“U”和“V”表示色度,作用是描述圖像色彩及飽和度,用于指定像素的顏色。根據(jù)美國(guó)國(guó)家電視制式委員會(huì)NTSC制式的標(biāo)準(zhǔn),白光的亮度用Y來(lái)表示,色差U、V由B-Y、R-Y按不同比例壓縮而成,與紅、綠、藍(lán)三色光的關(guān)系可用式(1)描述,這也是常用的轉(zhuǎn)換公式。YUV到RGB的轉(zhuǎn)換公式則如式(2)所示。
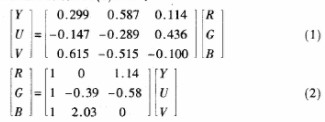
式中,R、G、B的取值范圍均為0“255。通常攝像機(jī)的數(shù)據(jù)以RGB、YUV或YCrCb的格式輸出。采用YUV顏色空間的重要性是它的亮度信號(hào)Y和色度信號(hào)U、V是分離的。目前有很多種顏色空間可以將圖像的色度分量和亮度分量區(qū)分開(kāi)來(lái),如HSV顏色空間,但是這種轉(zhuǎn)換較為復(fù)雜,對(duì)于大型圖像非常耗時(shí),并且在亮度值和飽和度較低的情況下,采用HSV顏色空間計(jì)算出來(lái)的H分量是不可靠的。
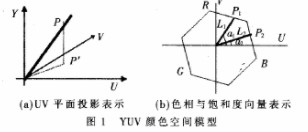
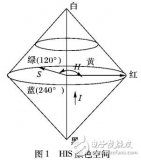
在YUV顏色空間中,如果只有Y信號(hào)分量而沒(méi)有U、V信號(hào)分量,則這樣表示的圖像就是黑白灰度圖像。除去亮度信號(hào)后,由U和V單純表現(xiàn)出色度。因此,如果要將U與V色差信號(hào)用色相及飽和度來(lái)表示,必須從含有三維空間的色點(diǎn)P投影到U-V平面的P′點(diǎn),如圖1(a)所示。U-V平面投影法在受到不穩(wěn)定光源亮度的擾動(dòng)時(shí),對(duì)于目標(biāo)色度有較大的精確性且不易辨識(shí)錯(cuò)誤,但是當(dāng)光源色溫變化過(guò)大時(shí),其飽和度和色相的增減變化不易掌握。因此,如果需要判定兩個(gè)任意色點(diǎn)是否為同一色度時(shí),必須確定其色相與飽和度都是相等的。如圖1(b)所示,對(duì)兩個(gè)色點(diǎn)P1與P2,當(dāng)其與U軸的夾角α1=α2時(shí),表示色相相等;當(dāng)其與原點(diǎn)的距離L1=L2時(shí),表示飽和度相等。當(dāng)兩者都相等時(shí),表示色度完全相同。
對(duì)于光源亮度的不穩(wěn)定因素,只要光源亮度不是極值(極亮或極暗),對(duì)于相似顏色,如深藍(lán)色和藍(lán)色,就有相近的色度關(guān)系。對(duì)運(yùn)動(dòng)目標(biāo)本體和陰影,也有相近的色度,但亮度值差別較大,可通過(guò)計(jì)算當(dāng)前圖與背景圖之間的亮度差值和色差來(lái)進(jìn)行陰影去除。
上述準(zhǔn)則在應(yīng)用中,要注意Ymin、ε和Δα等閾值的選取,因?yàn)檫@對(duì)判斷結(jié)果的影響較大。要找到合適的閾值[9],需要對(duì)視頻資料進(jìn)行大量的仿真實(shí)驗(yàn),這需要花費(fèi)很長(zhǎng)時(shí)間,而且根據(jù)現(xiàn)有資料得到的閾值不能根據(jù)場(chǎng)景、光照等的變化自適應(yīng)進(jìn)行調(diào)整,實(shí)用價(jià)值不大。
針對(duì)上述問(wèn)題,將模糊神經(jīng)網(wǎng)絡(luò)[10-11]融入到目標(biāo)本體與陰影的分類(lèi)中是很好的解決方法。它利用神經(jīng)網(wǎng)絡(luò)的自學(xué)習(xí)能力和自適應(yīng)能力來(lái)調(diào)整模糊規(guī)則和隸屬度函數(shù),通常對(duì)神經(jīng)網(wǎng)絡(luò)的訓(xùn)練采用BP算法,但是BP算法具有收斂性依賴(lài)初始條件,容易陷入局部極小值等問(wèn)題。因此,本文采用遺傳算法優(yōu)化模糊神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)和參數(shù),并自動(dòng)獲得最優(yōu)的模糊規(guī)則,使網(wǎng)絡(luò)能自動(dòng)適應(yīng)場(chǎng)景與光照的變化。
2.3 模糊神經(jīng)網(wǎng)絡(luò)
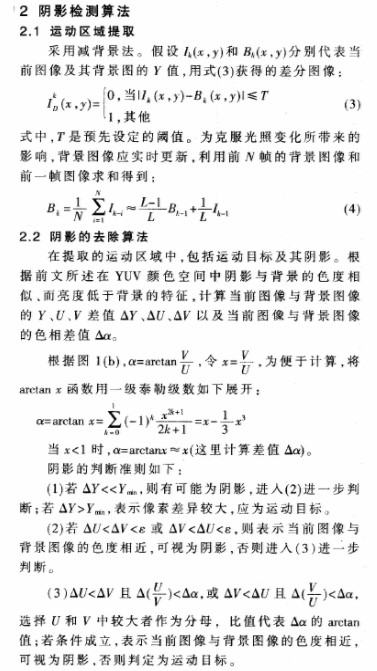
模糊神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)如圖2所示。
式中,ui表示對(duì)第i個(gè)模糊子集的隸屬度,zi表示輸出結(jié)論的支集值。最后,對(duì)輸出結(jié)果進(jìn)行二值化表示,1表示目標(biāo)本體,0表示陰影。當(dāng)結(jié)果小于0.05時(shí),認(rèn)定為陰影;結(jié)果大于0.95時(shí),認(rèn)定為目標(biāo)本體,當(dāng)結(jié)果在0.05”0.95之間時(shí),認(rèn)為無(wú)法判斷。
2.4 網(wǎng)絡(luò)自適應(yīng)優(yōu)化
用遺傳算法對(duì)模糊神經(jīng)網(wǎng)絡(luò)的結(jié)構(gòu)和參數(shù)進(jìn)行優(yōu)化。網(wǎng)絡(luò)的結(jié)構(gòu)優(yōu)化指確定第3層節(jié)點(diǎn)數(shù)、第3層和第2層的連接數(shù)、以及第3層和第4層的連接數(shù)和連接權(quán)值。網(wǎng)絡(luò)的參數(shù)優(yōu)化包括輸入變量的隸屬度函數(shù)的中心參數(shù)和寬度參數(shù)、輸出變量的隸屬函數(shù)支集值。
種群的每個(gè)個(gè)體由網(wǎng)絡(luò)結(jié)構(gòu)和網(wǎng)絡(luò)的輸入隸屬度函數(shù)參數(shù)和結(jié)論參數(shù)組成,其長(zhǎng)度為結(jié)構(gòu)基因長(zhǎng)度+參數(shù)基因長(zhǎng)度。結(jié)構(gòu)基因中“連接”采用二值的編碼,“0”表示沒(méi)有連接,“1”表示有連接,連接權(quán)值ωji用(0“1)之間實(shí)數(shù)編碼。輸入的隸屬度參數(shù)Cji和bj、結(jié)論參數(shù)zi采用實(shí)數(shù)編碼。一個(gè)染色體對(duì)應(yīng)一種模糊神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)及其參數(shù)。初始種群中包含著對(duì)應(yīng)于最大節(jié)點(diǎn)數(shù)及輸入變量和輸出變量在其變化范圍內(nèi)均勻劃分模糊子集的個(gè)體,其余個(gè)體隨機(jī)產(chǎn)生。將根據(jù)經(jīng)驗(yàn)得到的規(guī)則集及輸入輸出模糊劃分對(duì)應(yīng)的向量選入初始種群。
遺傳操作包括復(fù)制、交叉、變異。為簡(jiǎn)化運(yùn)算實(shí)現(xiàn)實(shí)時(shí)處理,本文僅采用變異操作。二值編碼按一定的概率將控制基因串中的位從0變異為1,或者從1變異為0。實(shí)數(shù)編碼按下式突變:
2.5 空間特征
考慮到圖像中陰影和目標(biāo)本體相接但互不相交,對(duì)于不能判斷的像素及初步識(shí)別結(jié)果,按下述規(guī)則進(jìn)行判斷和修正:(1)如果周?chē)袼攸c(diǎn)多數(shù)為“陰影”,則該點(diǎn)是“陰影”。(2)如果周?chē)袼攸c(diǎn)多數(shù)為“目標(biāo)”,則該點(diǎn)是“目標(biāo)”。(3)如果周?chē)袼攸c(diǎn)多數(shù)是目標(biāo)而被判斷為“陰影”,則改判斷為“目標(biāo)”。(4)如果周?chē)袼攸c(diǎn)多數(shù)是陰影而被判斷為“目標(biāo)”,則改判斷為“陰影”。這里的多數(shù)是指相鄰8個(gè)像素點(diǎn)中5個(gè)以上。
3 實(shí)驗(yàn)結(jié)果和分析
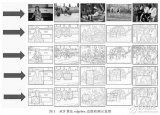
圖3、圖4是室外拍攝的視頻序列的處理結(jié)果,視頻序列共2 571幀,單幀圖像大小為354×288,圖3是第154幀圖像,圖4是第363幀圖像。
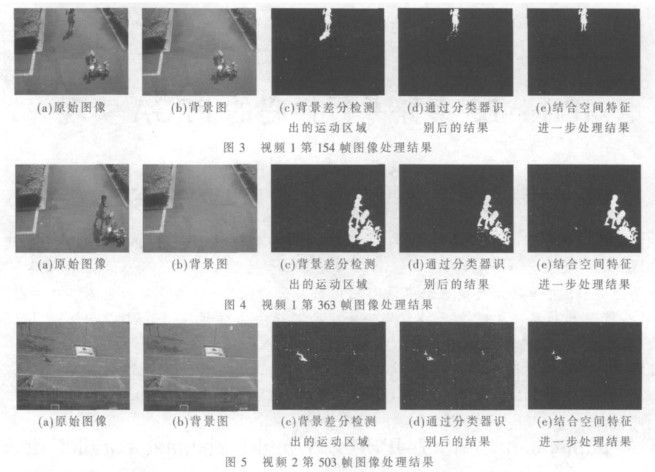
童車(chē)在圖3中作為背景被提取出來(lái),而在圖4中成為前景。與圖3相比,圖4中光照有較大變化,圖3(d)、圖4(d)、圖5(d)表明模糊神經(jīng)網(wǎng)絡(luò)分類(lèi)器能有效地進(jìn)行陰影去除。由圖5(d)可見(jiàn),通過(guò)陰影去除,行人能被分隔開(kāi)來(lái),這樣有利于提高視頻檢測(cè)的準(zhǔn)確率。
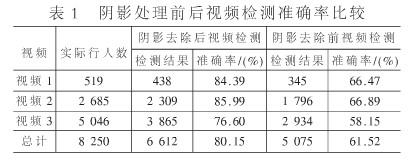
表1是對(duì)在不同路口拍攝的行人視頻進(jìn)行行人檢測(cè)的結(jié)果,進(jìn)行陰影去除后視頻檢測(cè)的平均準(zhǔn)確率由61.52%提高到80.15%。
本文給出了一種新的陰影去除算法,該算法以YUV顏色空間為基礎(chǔ),用模糊神經(jīng)網(wǎng)絡(luò)分類(lèi)器識(shí)別對(duì)像素點(diǎn)提取的光譜特征是否為陰影,網(wǎng)絡(luò)的結(jié)構(gòu)和參數(shù)采用遺傳算法進(jìn)行實(shí)時(shí)更新,最后結(jié)合運(yùn)動(dòng)目標(biāo)與陰影的空間特征對(duì)分類(lèi)結(jié)果進(jìn)行修正。實(shí)驗(yàn)表明,該方法能適應(yīng)光照、場(chǎng)景的變化,通過(guò)陰影去除能明顯提高行人視頻檢測(cè)的準(zhǔn)確率。
本文關(guān)于行人視頻檢測(cè)的研究尚處于起步階段,對(duì)視頻檢測(cè)中的遮擋問(wèn)題、運(yùn)動(dòng)描述和行為理解問(wèn)題還在進(jìn)一步研究中。
-
視頻
+關(guān)注
關(guān)注
6文章
1956瀏覽量
73046 -
攝像機(jī)
+關(guān)注
關(guān)注
3文章
1616瀏覽量
60198 -
檢測(cè)
+關(guān)注
關(guān)注
5文章
4509瀏覽量
91645
發(fā)布評(píng)論請(qǐng)先 登錄
相關(guān)推薦
基于FPGA的rgb與yuv顏色空間轉(zhuǎn)換
怎么設(shè)置去除Altium陰影部分重疊報(bào)錯(cuò)?
基于ACF算法的行人檢測(cè)領(lǐng)域的研究
基于改進(jìn)型LBP特征的監(jiān)控視頻行人檢測(cè)
基于顏色和空間融合的顯著圖算法
結(jié)合陰影抑制的混合高斯模型改進(jìn)算法

基于超像素和局部顏色恒常性的自適應(yīng)陰影去除
基于暗原色先驗(yàn)原理的顏色空間轉(zhuǎn)換算法去除圖像濃霧
顏色空間分布的多攝像機(jī)行人匹配
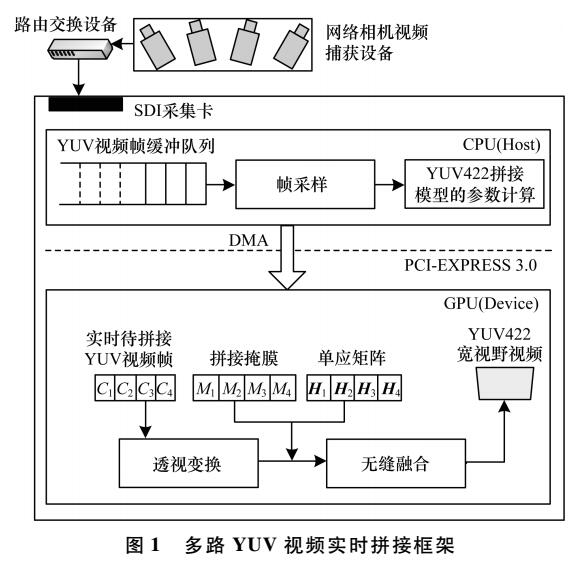
YUV視頻GPU實(shí)時(shí)拼接
基于YUV顏色空間的陰影去除算法在行人檢測(cè)與跟蹤中的應(yīng)用
可解析圖片顏色及設(shè)置多彩陰影控件PaletteImageView
什么是YUV

基于顏色感知背景的文檔圖像陰影去除






 工商網(wǎng)監(jiān)
工商網(wǎng)監(jiān)
評(píng)論