 介紹了MCS251單片機和PC機間的串口通信原理與通信協議
介紹了MCS251單片機和PC機間的串口通信原理與通信協議
隨著計算機技術的快速發展和廣泛應用,上位機和下位機的主從工作方式為工業控制及自動控制系統所采用。由于PC機分析能力強、處理速度更快及單片機使用靈活方便等特點,所以一般都將PC機作為上位機,單片機作為下位機,二者通過RS2232或者RS2485接收、發送數據和傳送指令。單片機可單獨處理數據和控制任務,同時也將數據傳送給PC機,由PC機對這些數據進行處理或顯示。
本文介紹PC機和單片機通信在一種基于C8051F單片機的波形發生器中的應用,在上位機上顯示正弦波的幅值和頻率,由上位機發送指令可以改變波形幅度及頻率。
1 硬件電路的設計
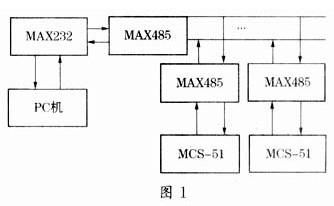
MCS251 單片機有一個全雙工的串行通訊口UART,利用其RXD和TXD與外界進行通信,其內部有2 個物理上完全獨立的接收、發送緩沖器SBUF,可同時發送和接收數據。所以單片機和PC機之間可以方便地進行串口通訊。單片機串口有3條引線: TXD (發送數據) 、RXD (接收數據)和GND(信號地) .因此在通信距離較短時可采用零MO2DEM方式,簡單三連線結構。IBM2PC機有兩個標準的RS2232串行口,其電平采用的是E IA電平,而MCS251單片機的串行通信是由TXD (發送數據)和RXD (接收數據)來進行全雙工通信的,它們的電平是TTL電平;為了PC機與MCS251機之間能可靠地進行串行通信,需要用電平轉換芯片,我們采用了MAXIM公司生產的專用芯片MAX232 進行轉換。
電路如圖1所示。
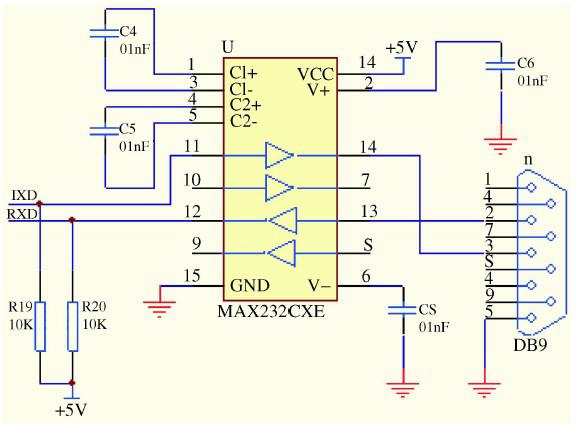
圖1 轉換芯片電路
2 系統軟件設計
軟件設計分上位機軟件設計和下位機軟件設計。這兩部分雖然在不同的機器上編寫和運行,但它們要做的工作是對應的:一個發送,另一個接收。
為了保證數據通信的可靠性,要制定通信協議,然后各自根據協議分別編制程序。現約定通信協議如下: PC機和單片機都可以發送和接收。上位機和下位機均采用查詢方式發送控字符和數據、中斷方式接收控制字符和數據。采用RS2232串口異步通信,1位起始位, 8位數據位, 1位停止位,無奇偶校驗,波特率9 600 b / s.每次PC機向單片機發送數據時,先發送握手信號"FF",下位單片機收到握手信號則發送應答信號"EE"至PC機,上位PC機收到應答信號后即發送數據。同樣,當單片機要向PC機發送數據時,也先向PC機發聯絡信號"EB90",PC機收到聯絡信號后發應答信號"EBOO",單片機收到應答信號后則發送數據。
2.1 上位機通信程序設計
PC機的串口都采用的是INS8250芯片。PC機中有2個異步通信口,一個是COM1,其端口地址范圍是3F8H-3 FFH,另一個是COM2,其端口地址是2F8H-2FFH.其與MODEM配合可以實現遠距離通信。其波特率是標準波特率(50-9 600) b / s。
8250內部有10個寄存器端口,其中有一個除數鎖存器,可以通過編程除數的大小來確定異步通信的波特率。8250使用的頻率是2 MHz的基準時鐘輸入信號,所以必須用分頻的方法產生所需要的波特率(移位脈沖) .除數鎖存器的值必須在8250初始化時設置, 即把通信線路控制器的最高位(DLAB)置1,然后分兩次把除數鎖存器的高8位和低8位分別寫入端口地址3F8H和3F9H (COM1) ,8250傳送或接收串行數據時使用的時鐘信號的頻率是數據傳輸波特率的16 倍,即波特率= 16 ×除數/1 843 200.
在Windows平臺上的串行通信多使用其提供的AP I函數來實現,這種方法使用起來需要許多底層設置,因而較為繁瑣,并且難以理解。Microsoft推出的ActiveX技術提供了另外一種實現串行通信的方法。這種方法不僅相對較為簡單,而且非常實用。
尤其是Visual C + +這種可視化面向對象的編程環境中,可以真正把串口看作一個對象,編程時只需簡單的設置,理解起來也很容易。本文上位機通信程序使用VC + +提供的串行通信控件MSComm (Mi2crosoft Communication Control) ,主要步驟如下:打開VC + + 610集成開發環境,選擇菜單項File /New,在出現的對話框中選中Projects標簽中的MFC App2Wizard ( exe) ,生成一個基于對話框的應用程序。選擇菜單項Project/Add to p roject/Components andControls?,在彈出的對話框中選擇Registered Ac2tiveX Controls文件夾下的Microsoft CommunicationsControl, 選擇Registered ActiveX Controls 來注冊MSComm,將該控件從工具箱中拉到對話框中即可實現控件的插入。選擇ClassWizard為新創建的通信控件加入一個成員變量,將其命名為m_commute.
通過該成員變量便可以對串口屬性進行設置。以下是通過設置控件屬性對串口進行初始化:
BOOL CMyCOMMDlg: : OnlnitDialog( )
{
CDialog: : OnlnitDialog( ) ;
/ /此處為應用框架自動生成代碼
m_commute. SetCommPort(1) ; / /使用串口1
m_commute. SetSettings("9600,N, 8, 1") ; / /波特率為9600,無奇偶校驗, 8位數據位, 1位停止位
m_commute. SetRThreshold (10) ; / /每接收10個字符就觸發1次接收事件
m_commute. SetSThreshold (0) ; / /不觸發發送事件
m_commute. SetInputLen (10) ; / /每次讀操作從緩沖區中取10個字符
m_commute. SetInputMode (1) ; / /二進制數據傳輸形式
m_commute. SetPortOpen ( TRUE) ; / /打開串口
return TRUE; / /返回
}
事件驅動是處理串行端口交互作用的一種非常有效的方法。OnComm 事件的CommEvent屬性可以捕捉并檢查通信事件和錯誤。發生通信事件或錯誤時,將觸發OnComm 事件, CommEvent屬性的值將被改變,應用程序檢查CommEvent屬性值并作出相應的反應。雙擊對話框中CMSComm控件,添加OnComm事件的代碼:
if (m_commute. GetCommEvent( ) = = 2) / /判斷comEvReceive事件發生否
{
shortm_size =m_commute. GetinBufferCount( ) ;
if (m_size = = 11) / /緩沖區為11個字符為滿
{
m_commute. SetInputLen (L) ; / /讀取接收到的數據
VAR IANT vRep ly =m_commute. GetInput ( ) ; / /處理接收到的數據
}
}
2.2 下位機通信程序設計
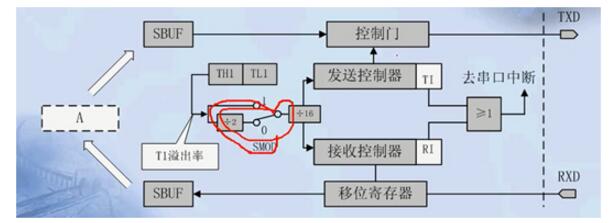
在上位機與多片單片機通信中,要保證主機與從機間可靠的通信,必須保證通信接口具有識別功能。而單片機串行口控制寄存器SCON中的控制位SM2就是為了滿足這一要求而設置的。且SM2控制位只在MCS51單片機的串行工作方式2與方式3才起作用。在串行口以方式2或方式3接收時,若SM2 =1,表示置多機通信功能位,這時出現兩種可能情況:接收到第9位數據為1時,數據才裝入SBUF,并置R I = 1向CPU發出中斷請求;如果接收到第9位數據為0時,則不發生中斷,信息被掉失。若SM2=0,則接收到的第9位數據無論是0還是1都產生R I =1中斷標志,接收到的數據裝入SBUF中。根據上述情況MCS - 51多機通信過程安排如下:
(1)開始時設所有的從機SM2位為1 ,處于只接收地址幀的狀態(串行幀的第9位為1 ) ,對數據幀(串行口的第9位為0)則不做響應。
(2)當從機接收到主機發來的地址幀后,將所接收的地址與本機地址相比較,若地址與本機地址相符,便使SM2清零以接收主機隨后發來的數據,對于地址不相符合的從機,仍保持SM2 = 1狀態,故不能接收主機隨后發來的數據信息。
(3)當主機改為與另外從機聯系時,可再發出地址幀來尋找其它從機。而先前被尋址過的從機在分析出主機是對其它從機尋址時,恢復其SM2 = 1,等待主機的再一次尋址。
(4)從機要呼叫主機時,可先發送握手信號,主機檢測到有從機呼叫后,發出應答信號,從機接收到主機應答后,便可發送數據給主機。主機通過該信號來判斷從機所處的狀態,從而作出相應的反應。
設計單片機通信程序時,必須充分發揮單片機的效率。由于單片機多應用于實時性較強的控制場合,因此,應將及時響應和控制對象的動作放在優先考慮的位置,以盡量減少通信等輔助性操作所占用的CPU時間。基于上述考慮,筆者在設計單片機通信程序時,將通信程序分為接收中斷處理程序、發送中斷處理程序和通信處理程序3部分,并將這3部分程序巧妙地進行組合,從而構成整個單片機的通信程序。圖2給出了接收中斷處理子程序,圖3給出了發送中斷子程序。
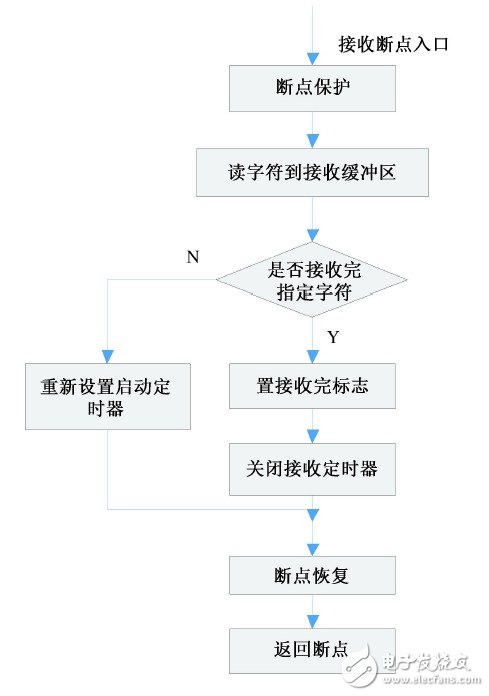
圖2 接收中斷處理程序
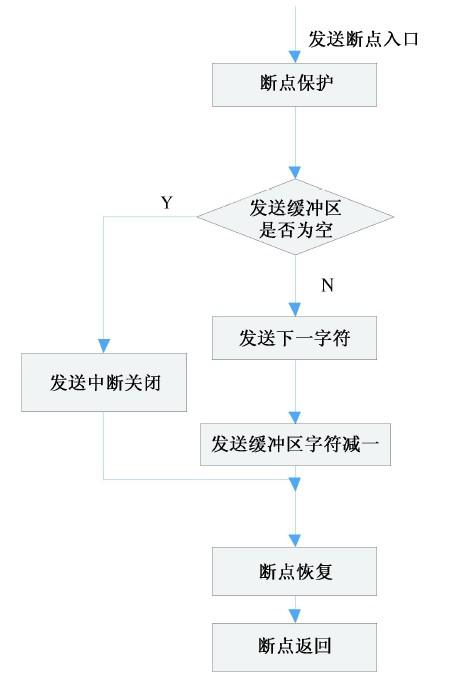
圖3 發送中斷處理程序
3 結束語
本文給出了上位PC機與下位單片機之間進行異步串行通信的解決方案,上位機通過友好的用戶界面,可給下位機發送控制指令。此方案在實際運行過程中,運行穩定,效果良好,從而較好地解決了上位機與下位機之間的通信問題。
-
單片機
+關注
關注
6039文章
44575瀏覽量
636382 -
PC
+關注
關注
9文章
2089瀏覽量
154334 -
計算機
+關注
關注
19文章
7518瀏覽量
88191
發布評論請先 登錄
相關推薦
單片機串口通信協議的實現實例分享
基于MCS2-51單片機的PS/2模擬鍵盤接口的設計研究
PC機鍵盤通信協議及其在單片機應用系統右的實現
單片機:Modbus 通信協議介紹






 工商網監
工商網監
評論