 簡單介紹自動駕駛中的車載激光雷達
簡單介紹自動駕駛中的車載激光雷達
此前我們介紹了激光雷達的由來和歷史發展,對于激光雷達的基本工作原理,也做了簡單介紹。激光雷達的發射器發射出一束激光,激光光束遇到物體后,經過漫反射,返回至激光接收器,雷達模塊根據發送和接收信號的時間間隔乘以光速,再除以2,即可計算出發射器與物體的距離。
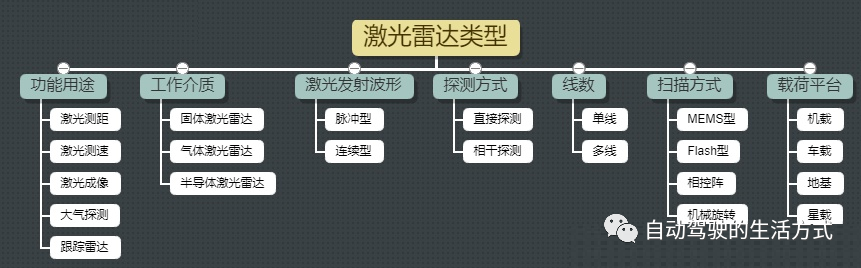
本文就汽車用激光雷達的分類,先做簡單介紹。
激光雷達根據安裝位置的不同,分類兩大類。一類安裝在無人車的四周,另一類安裝在無人車的車頂。安裝在無人車四周的激光雷達,其激光線束一般小于8,常見的有單線激光雷達和四線激光雷達。安裝在無人車車頂的激光雷達,其激光線束一般不小于16,常見的有16/32/64線激光雷達。
單線激光雷達是目前成本最低的激光雷達。成本低,意味著量產的可能性大。
前面北京首個自動駕駛測試場啟用時出現的福田自動駕駛汽車,就使用了4個單線激光雷達,分別布置于無人車的前后左右,用于車身周圍障礙物的檢測,如下圖。
單線激光雷達的原理可以通過下圖理解。單束激光發射器在激光雷達內部進行勻速的旋轉,每旋轉一個小角度即發射一次激光,輪巡一定的角度后,就生成了一幀完整的數據。因此,單線激光雷達的數據可以看作是同一高度的一排點陣。
單線激光雷達的數據缺少一個維度,只能描述線狀信息,無法描述面。如上圖,可以知道激光雷達的面前有一塊紙板,并且知道這塊紙板相對激光雷達的距離,但是這塊紙板的高度信息無從得知。
而四線激光雷達則如下圖所示,基本都像這樣。
典型的應用,如全新的奧迪A8為了實現Level 3級別的自動駕駛,也在汽車的進氣格柵下布置的四線激光雷達ScaLa。
有了之前單線激光雷達的原理介紹,參考單線激光雷達的基本原理,那么四線激光雷達的工作原理就很容易理解了。如下圖所示,不同的顏色代表不同的激光發射器。
四線激光雷達將四個激光發射器進行輪詢,一個輪詢周期后,得到一幀的激光點云數據。四條點云數據可以組成面狀信息,這樣就能夠獲取障礙物的高度信息。而根據單幀的點云坐標可得到障礙物的距離信息。再根據多幀的點云的坐標,對距離信息做微分處理,可得到障礙物的速度信息。
實際應用時,在購買激光雷達的產品后,其供應商也會提供配套的軟件開發套件(SDK,SoftwareDevelopment Kit),這些軟件開發套件能很方便地讓使用者得到精準的點云數據,而且為了方便自動駕駛的開發,甚至會直接輸出已經處理好的障礙物結果。
如下圖所示,綠色的矩形框即為障礙物相對于自車的位置,矩形框的前端有個小三角,表示障礙物的運動方向。
上面介紹了安裝在無人車四周的激光雷達,而對于安裝在無人車車頂的激光雷達,其激光線束一般不小于16,常見的有16/32/64線激光雷達。
16/32/64線的激光雷達的感知范圍為360°,為了最大化地發揮他們的優勢,常被安裝在無人車的頂部。三款激光雷達的技術參數和成本如下圖。
360°的激光數據可視化后,就是大家經常在各種宣傳圖上看到的效果,如下圖。圖中的每一個圓圈都是一個激光束產生的數據,激光雷達的線束越多,對物體的檢測效果越好。比如64線的激光雷達產生的數據,將會更容易檢測到路邊的馬路牙子。
16/32/64線的激光雷達只能提供原始的點云信號,沒有對應的SDK直接輸出障礙物結果。因此各大自動駕駛公司都在點云數據基礎上,自行研究算法完成無人車的感知工作。
Google Car上最重要也是最貴的器件就是頭頂的這臺Velodyne Lidar公司生產的HDL-64E 64線激光發射器了。它可以一邊旋轉一邊不間斷的發射64束最遠射程可達120米的激光束,并接收反射回來的光束,依據返回時間的差別計算出物體與汽車之間的距離。從而繪制出汽車周圍實時的3D地形圖。并且因為光束非常密集并且刷新頻率非常快,綜合探測數據后還可以判斷出物體的形狀、大小和大致的運動軌跡,以此作為接下來行動的判斷依據之一。HDL-64E的性能非常強大。每秒可以給Google Car的處理器提供130萬組數據,這可以保證提供給Google Car處理器的信息幾乎是實時的。當然這也對處理器提出了更高的要求。下圖就是在HDL-64E的運作下Google Car看到的世界:
這是未經處理器處理過的原始數據樣貌,Google Car會將收集到的數據與車體內置的谷歌地圖已有的信息進行整合,從而判斷出相當精確的四周的狀況,為系統做出正確反應打下良好基礎。
-
激光雷達
+關注
關注
968文章
3972瀏覽量
189924 -
自動駕駛
+關注
關注
784文章
13812瀏覽量
166457
原文標題:自動駕駛之——車載LiDAR的基本分類
文章出處:【微信號:IV_Technology,微信公眾號:智車科技】歡迎添加關注!文章轉載請注明出處。
發布評論請先 登錄
相關推薦
淺析自動駕駛發展趨勢,激光雷達是未來?
激光雷達是自動駕駛不可或缺的傳感器
激光雷達-無人駕駛汽車的必爭之地
成熟的無人駕駛方案離不開激光雷達
即插即用的自動駕駛LiDAR感知算法盒子 RS-Box
北醒固態設計激光雷達
北醒固態激光雷達
固態設計激光雷達
從光電技術角度解析自動駕駛激光雷達
激光雷達成為自動駕駛門檻,陶瓷基板豈能袖手旁觀
自動駕駛系統設計及應用的相關資料分享
激光雷達如何助力自動駕駛?
自動駕駛中車載激光雷達是什么?





 工商網監
工商網監
評論