 采用嵌入式芯片和Zigbee通信芯片設計停車誘導系統
采用嵌入式芯片和Zigbee通信芯片設計停車誘導系統
為降低城市級停車誘導系統的建設、運營成本,提出一種無需建立管理控制中心的系統架構,采用LPC11C14和CC2530作為核心芯片設計了系統中的重要組成部分--區域性Zigbee網絡。通過所開發出的測試系統的實驗,表明該Zigbee網絡可準確接收用戶手機發出的停車請求,并能根據停車場內車位狀態向用戶反饋最佳車位信息,從用戶發送請求到收到反饋信息的時間不超過10s。
停車誘導系統是一種以多級信息發布為載體,可實時地提供停車場的位置、車位數、車位狀態等信息,指引駕駛員有效停車的信息系統。根據覆蓋范圍的大小,停車誘導系統一般又可分為城市級和停車場級兩種。為節約城市級停車誘導系統的建設及運營成本,本文提出一種無需建立管理控制中心的系統架構。在此基礎上,本文重點研究所提架構中的重要組成部分--區域性Zigbee網絡的硬件及軟件設計。
1 研究現狀
停車誘導系統是一種用于緩解城市中停車難現象的智能交通系統。國外最早出現于1971年的德國亞琛市,近40年的發展效果顯著。我國的建設興起于2001年,近10多年的發展也取得了不錯的效果。經分析后發現,國內外的各種系統雖各有特點,但它們的系統結構和工作原理基本相似,均大致由數據采集、數據傳輸、中央管理和數據發布4個部分組成。因此,均需建設和維護一個城市級的管理控制中心,運營部門也需要長期繳納數據采集和數據發布兩部分與管理控制中心間的通信費用,導致系統的建設和后期運營的成本較高。
2 系統總體架構
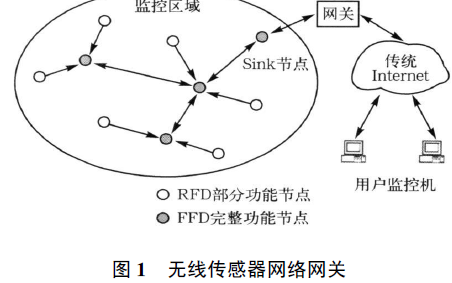
通過在城市的每一個室內停車場、每一個室外停車場和每一塊路邊停車區域分別部署一個“區域性”的ZigBee網絡,并與停車用戶的智能手機相配合,即可完成在整個城市中實現停車誘導的功能。在上述架構中,無需建設一個城市級的管理控制中心,從而可大大節約系統的建設與后期運營成本。所設計的系統架構如圖1所示,其大致工作流程為:
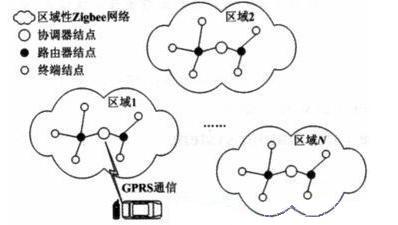
圖1 一種低成本城市級停車誘導系統的總體結構圖
1)每個ZigBee網絡的所有終端結點定期采集所連接的傳感器傳來的車位狀態信息。
2)若采集到的車位狀態與上次狀態不同,則將當前車位狀態發送給相鄰的路由器結點,并等待協調器結點的反饋。若超過一定時間未收到反饋則重發,直至收到反饋。
3)各路由器結點把所收到的終端結點的數據都轉發給協調器結點。
4)協調器結點收到車位狀態變化的消息后,給終端結點發送反饋,并更新數據庫。
5)當汽車行駛至某地時,用戶觸發智能手機提出尋找車位的請求,事先安裝好的智能手機軟件根據車輛當前位置運行停車場尋優算法確定最優的停車場(或路邊停車區域)。
6)智能手機軟件與最優停車場(或路邊停車區域)的協調器結點通信,協調器結點查詢當前的車位狀態數據庫。若無空閑車位,將所有車位已滿的信息反饋給智能手機軟件;否則,系統運行停車位尋優算法確定最優的停車位。
7)確定最優停車位后,智能手機軟件先將車輛引導至目的停車場(或路邊停車區域)。再繼續將車輛引導至目的停車位。
3 區域性Zigbee網絡的硬件設計
區域性Zigbee網絡由協調器、路由器、終端三類結點構成。終端結點負責定時采集車位狀態并將車位狀態變化的信息發送出去;路由器結點負責轉發車位狀態變化信息;協調器結點的任務包括:接收車位狀態變化信息并更新數據庫,接收用戶通過智能手機發出的停車請求,查詢數據庫中的車位狀態,運行停車位尋優算法,向用戶反饋最佳車位信息等。
在協調器結點中,需要以下主要器件:1)一塊嵌入式控制器芯片,用于管理嵌入式數據庫;2)一塊Zigbee通信芯片,用于與路由器結點通信;3)一塊GPRS模塊,用于與用戶智能手機進行通信。
嵌入式控制器選用恩智浦公司的LPC11C14芯片。該芯片采用Cortex-M0內核處理器,工作頻率最高可達50 MHz。在存儲器方面,配置了32kB FLASH和8KB SRAM;在接口方面,配置有一個串口、一個2通道10位ADC、兩個SPI接口、一個I2C接口、一個SWD接口等。
Zigbee通信芯片選用n公司的CC2530。該芯片適用于2.4 GHz IEEE 802.15.4和Zigbee等應用。芯片內部包括射頻收發器、可編程閃存、增強型8051MCU、8KB RAM等。由于從休眠模式轉換到工作模式的耗時非常短,所以該芯片特別適合低功耗應用。
由于LPC11C14芯片內部不含EEPROM,為實現車位狀態數據在嵌入式數據庫中的存儲,通過I2C接口外接AT24C02芯片。LPC11C14與CC2530間的通信設計為利用串口進行通信。因為LPC11C14只有一個串口資源,為實現LPC11C14與GPRS模塊的串行通信,采用SPI轉串口芯片MAX3100進行轉換。
GPRS模塊采用通用模塊SIM_300S。LPC11C14板的電源芯片采用MIC5209,CC2530板的電源芯片采用HT7533。協調器結點的總體硬件框圖如圖2所示。
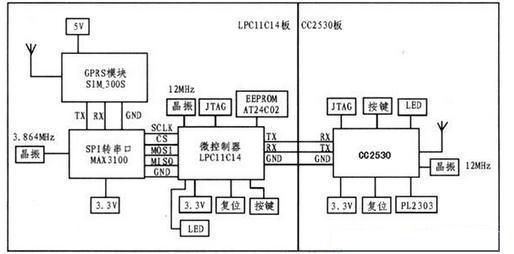
圖2 協調器結點硬件結構圖
終端結點和路由器結點的硬件框圖與協調器結點中CC2530的框圖非常類似。區別主要是終端結點中連接有車位檢測傳感器,此外終端結點和路由器結點采用鋰電池供電。
4 區域性Zigbee網絡的軟件設計
協調器結點中LPC11C14的主程序流程圖如圖3所示。上電后首先完成初始化。若接收到CC2530發送的車位狀態變化信息,給CC2530發送反饋,隨即更新數據庫。若接收到停車請求,則根據數據庫中的車位當前狀態,判斷有無空閑車位。若有空閑車位,運行停車位尋優算法,確定最優停車位。之后,通過GPRS模塊向用戶反饋結果。
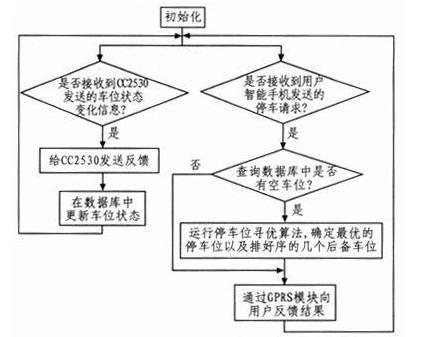
圖3 LPC11C14的主程序流程圖
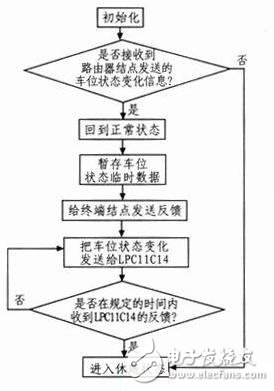
圖4 協調器CC2530的主程序流程圖
協調器結點中CC2530的主程序流程圖如圖4所示。初始化后,首先判斷是否收到車位狀態變化消息。若未收到,進入休眠狀態;若收到,則從休眠狀態回到正常狀態。接下來,為防止車位狀態存儲到數據庫前丟失,需在CC2530內部的Flash存儲器中臨時存放。之后,通過路由器結點給終端結點發送反饋。最后,把車位變化信息發送給LPC11C14并等待反饋。若在規定的時間內沒有收到反饋,則重發;若收到反饋,則進入休眠狀態。
終端結點的主程序流程圖如圖5所示。初始化后對車位檢測傳感器進行數據采集,得到的數據經過CC2530自帶的A/D模塊進行AD轉換,然后以循環覆蓋的方式存入CC3530內部的FLASH。之后,判斷當前狀態與上一個狀態是否相同。若車位狀態發生變化,由Zigbee射頻模塊通過路由器結點向協調器結點發送數據,并等待協調器結點的反饋。若在規定的時間內沒有收協調器結點的反饋,則重發數據;若收到反饋,則開啟定時中斷后進入休眠狀態。接下來等待定時中斷喚醒,進行下一次的數據采集。
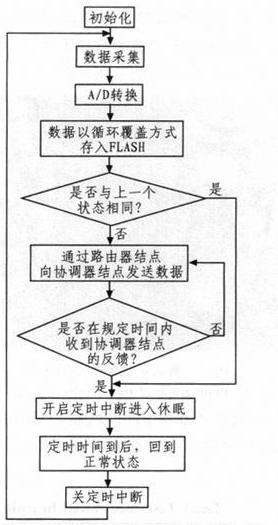
圖5 終端結點的主程序流程圖
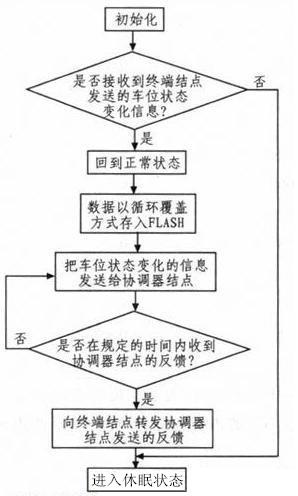
圖6 路由器結點的主程序流程圖
路由器結點的主程序流程圖如圖6所示,若接收到終端結點發送的車位狀態變化信息,則產生外部中斷,從休眠狀態回到正常狀態。然后以循環覆蓋的方式存入CC3530內部的FLASH.接著將車位狀態變化的信息發送給協調器結點,并等待協調器結點的反饋。若在規定的時間內沒有收到反饋,則進行重發;否則,向終端結點轉發協調器結點發送的反饋,之后進入休眠狀態,等待外部中斷喚醒。
5 實物展示及模擬運行結果
圖7為所開發出的測試系統的實物展示圖。在圖7的中上部,左邊是協調器結點的LPC11C14板,右邊是協調器結點的CC2530板。在LPC11 C14板中,左邊帶有天線的部分是商品化的GPRS模塊。在CC2530板中,中上部帶有天線的部分是商品化的Zigbee射頻模塊。由于這兩部分的頻率均處于微波頻段,因此為保證可靠性采用商品化的成熟模塊。在圖7的中下部,左邊是路由器結點,右邊是終端結點。為保證測試效果,這兩個結點在測試時均采用的是商品化的Zigbee模塊,測試通過后可將底板替換為自己開發的底板(即:目前協調器結點中CC2530板所用的底板)。
圖7 測試系統的實物展示圖
為測試區域性Zigbee網絡軟、硬件設計的有效性,事先在LPC11C14板的嵌入式數據庫中存入如表1所示的測試數據。之后,利用手機發送短信向LPC11C14板的GPRS模塊提出停車請求。接下來,LPC11C14運行停車位尋優算法。根據表1中的數據,經計算后得出結論:005號車位最佳。然后,LPC11C14的GPRS模塊向手機回復短信。短信的發送和接收界面如圖8所示。根據計時結果,從觸發短信發送按鈕到收到反饋的時間不超過10秒。
圖8 手機發送和接收信息的顯示界面
注:1)當前狀態為0時,表示車位為占用狀態;當前狀態為1時,表示車位空閑。2)兩邊車位的占用情況為0時,表示兩邊車位均未被占用;為1時,表示有一邊被占用;為2時,表示兩邊均被占用。
6 結論
以嵌入式芯片LPC11C14和Zigbee通信芯片CC2530為主要部件,設計了一套用于停車誘導的區域性Zigbee網絡的硬件電路,同時開發了協調器、路由器和終端三類節點的控制和通信程序。測試實驗表明,所設計的Zigbee網絡可準確接收用戶的停車請求,并能及時反饋最佳車位信息,從用戶請求到收到反饋的時間不超過10 s。
-
芯片
+關注
關注
455文章
50851瀏覽量
423984 -
嵌入式
+關注
關注
5083文章
19131瀏覽量
305543 -
ZigBee
+關注
關注
158文章
2270瀏覽量
242870
發布評論請先 登錄
相關推薦
嵌入式通信
嵌入式系統與遠程監控主機的網絡通信怎么實現?
嵌入式網絡監控系統有什么優點?
嵌入式ZigBee串口模塊的設計
如何使用ARM與ZigBee進行嵌入式無線傳感器網絡網關的設計資料概述






 工商網監
工商網監
評論