 采用AT89C51單片機實現動態車輛檢測器系統的設計
采用AT89C51單片機實現動態車輛檢測器系統的設計
引言
隨著經濟的發展,不停車收費系統(ETC)已在我國悄然興起。不停車收費系統主要是由通訊、監控、收費三大系統組成。整個系統可靠運行的一個重要環節就是車輛檢測器。在不停車收費系統中它是檢測駛向通訊區域的車輛并命令天線進行通信的傳感器,具有進入檢測、車速檢測、車型判別等功能;它是檢測出離開通信區域的車輛、根據ETC車道控制器的判斷控制欄桿、路側顯示器的傳感器,具有進入檢測功能;它具有檢測車輛通過,控制清除針對該車輛的路側顯示器的顯示內容以及控制針對后續車輛的顯示的功能,并命令欄桿關閉的功能。
考慮到性能、價格、技術復雜性、可靠性、維護要求、適用范圍等因素,我們這種車輛檢測器是基于地感線圈原理研制的。
1、動態車輛檢測器設計
1.1 系統組成
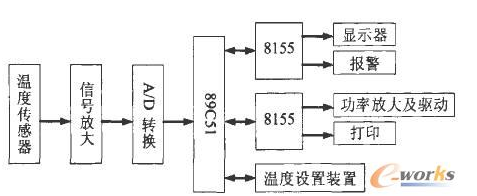
圖1為動態車輛檢測器系統框圖。地感線圈通過饋線與諧振電路相連,當鐵磁性的車體通過地感線圈時,通過諧振電路將電感量的變化轉換成頻率的變化。單片機是整個系統的核心,通過單片機計數器進行計數,不斷讀出數據即出當前頻率,獲得頻率變化趨勢,并根據當前的各種參數要求與基準頻率比較從而判斷是否有車到來,最后輸出不同的狀態信號供外部設備使用。同時上位機通過串口RS232采集到頻率變化值形成感應頻率曲線用于車型判別。
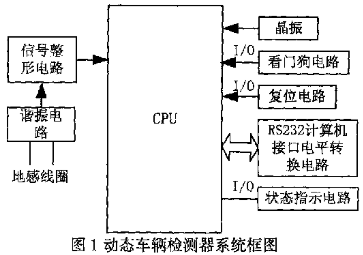
為了確保設備在公路現場惡劣的噪聲干擾環境下,能夠長期正常可靠地工作,專門設計了硬件看門狗電路,使其保證設備在死機后迅速自啟動恢復工作。同時在檢測器長期運行過程中,如果工作頻率超出了一定的范圍則通過復位電路進行復位,以重新進行頻率調整。狀態指示電路用于指示車輛檢測信息,裝置運行與網絡通訊信息,檢測器工作狀態信息等。
1.2 動態車輛檢測電路
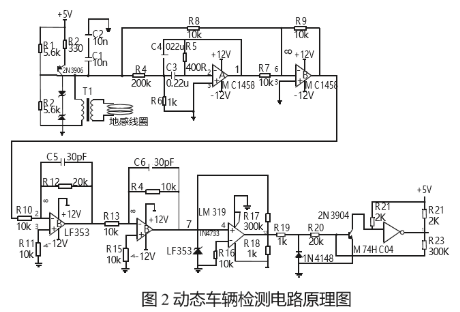
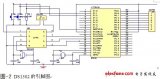
圖2給出了動態車輛檢測電路原理圖。整個電路是由諧振電路、由用帶通和相加器組成的帶阻濾波器、同相直流放大器、遲滯比較電路和波形整形電路組成。基準頻率的獲取直接影響測量精度,如果諧振電路的振蕩頻率較低,當有不同類型車輛經過地感線圈時,諧振電路輸出信號的波形形狀變化不大,只存在由于車輛底盤離地面高低不同而引起的微弱變化。這樣則大大減小了測量精度,使得判斷車輛通過的結果誤差很大。本 圖2動態車輛檢測電路原理圖設計采用電容反饋三點式振蕩電路,將電路的起始基準頻率設計在100KHz左右,工作頻率在100KHz—160KHz 之間都很穩定,完全可以滿足交通部規定線圈的適用范圍(10Uh—2200Uh)。
2、系統軟件設計
本系統采用AT89C51單片機,片內有4KBYTE的EPROM可以反復編程,并且操作簡單,便于開發調試和批量生產。我們選用11.0592MHz的晶振。
2.1當前頻率獲取
在主程序中設置一個定時器,定時周期為8ms,定時時間到觸發定時中斷Timer1Int,在中斷服務程序中,不斷讀取當前振蕩計數值,并保存到Counter的自變量中。
2.2 基準頻率校訂
基準頻率的獲取比較復雜。由于環境因素的影響,外界的各種干擾會導致同一線圈的基準頻率發生變化,使得線圈的基準頻率值不固定,是一個時變參數。基準頻率主要向兩個方向變化:一方面因外界條件變化而導致線圈電感量增大,使得實際基準頻率變小,此時當前頻率也相應的變小。在這種情況下,當前頻率在緩慢地變小,而基準頻率如果保持不變,這樣兩個值的差會小于設定的閾值,檢測不到車輛的到來。
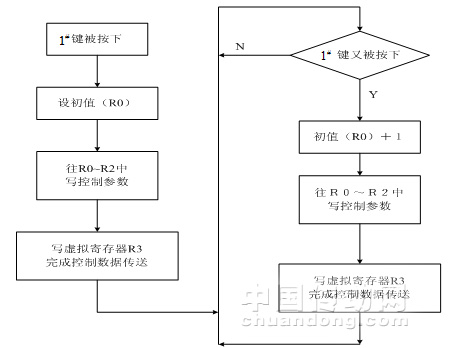
另一方面,由于外界條件的變化而導致線圈電感量減少,從而引起頻率的增加,而有車通過的時候也會引起頻率的增加,這兩種情況相似,如果不采取措施將會產生車沒來而判斷到車來的情況導致檢測器誤檢。因此在系統運行的過程中我們必須不斷的校訂基準頻率。基準頻率校訂算法流程圖如圖三所示。該算法根據有車到來時頻率向兩個方向變化分別進行校訂。

2.3車型識別:
在不停車收費系統中,我們用自動收費系統代替傳統的人工半自動收費系統。自動收費系統將需要許多高新技術,其中一個最為關鍵的技術是如何測出實際的車輛類型以確定收費標準。我們選用地感線圈作為傳感器,結合模糊模式識別算法對車輛進行分類。
3 、結束語
本系統采用了多種軟硬件抗干擾措施,并能夠對基準頻率進行實時校訂,使系統具有實時性強、性能穩定、檢測率高等特點,基本上滿足了ETC系統的各種要求。另外采用模糊模式識別方法,更好的利用人的識別經驗,把人的經驗歸納成推理規則,用推理代替計算來完成識別的過程。模糊模式識別方法的使用充分發揮了地感線圈在分類系統中低成本、高可靠度、簡單方便等獨特的優勢。通過改變閾值等各種參數還可以將其應用在停車場等不同場合。
責任編輯:gt
-
傳感器
+關注
關注
2551文章
51171瀏覽量
754245 -
單片機
+關注
關注
6037文章
44565瀏覽量
635983 -
顯示器
+關注
關注
21文章
4981瀏覽量
140086
發布評論請先 登錄
相關推薦
如何實現(電腦)PC機與單片機AT89C51的串行通信
AT89C51單片機簡介
基于AT89C51單片機的萬年歷設計與實現
基于AT89C51單片機的溫度檢測系統硬件電路設計






 工商網監
工商網監
評論