 如何實現步進電機中的速度調節控制設計
如何實現步進電機中的速度調節控制設計
引言
對步進電機的控制是經濟型數控系統開發時的一項重要內容,其中對步進電機運動過程中的升 降速控制是重點。步進電機是將電脈沖信號轉變為角位移或線位移的開環控制元步進電機件。在非超載的情況下,電機的轉速、停止的位置只取決于脈沖信號的頻率和脈沖數,而不受負載變化的影響,當步進驅動器接收到一個脈沖信號,它就驅動步進電機按設定的方向轉動一個固定的角度,稱為“步距角”,它的旋轉是以固定的角度一步一步運行的。可以通過控制脈沖個數來控制角位移量,從而達到準確定位的目的;同時可以通過控制脈沖頻率來控制電機轉動的速度和加速度,從而達到調速的目的。步進電機是一種感應電機,它的工作原理是利用電子電路,將直流電變成分時供電的,多相時序控制電流,用這種電流為步進電機供電,步進電機才能正常工作,驅動器就是為步進電機分時供電的,多相時序控制器雖然步進電機已被廣泛地應用,但步進電機并不能象普通的直流電機,交流電機在常規下使用。它必須由雙環形脈沖信號、功率驅動電路等組成控制系統方可使用。因此用好步進電機卻非易事,它涉及到機械、電機、電子及計算機等許多專業知識。步進電機作為執行元件,是機電一體化的關鍵產品之一, 廣泛應用在各種自動化控制系統中。隨著微電子和計算機技術的發展,步進電機的需求量與日俱增,在各個國民經濟領域都有應用。
1 步進電機動態特性分析
由于步進電機的輸出轉矩隨步進頻率的增加而減少,根據步進電機的動態特性,可以通過其動 力模型(二階微分)描述: 式中:J—系統的總轉動慣量 θ—轉子的轉角 β—阻尼系數 k—與θ成某種函數關系的比例因子 Tz—摩擦阻力矩及其它與β無關的阻力矩之和 Td—步進電機所產生的電磁驅動轉矩 式中, —慣性扭矩 —角加速度 顯然,慣性扭矩 應小于最大電磁轉矩Td,在升速階段角加速度 越大越好,使得到達勻 速的時間越短,但在加速階段為了減小對系統的沖擊 不應該突變,故在不失步的前提之下,在加速階段 應正比于頻率f對時間的微分。故 可以表示為: 式中:A和B是兩個特定的時間常數。 假設在升速階段的啟動頻率為 ,則對(3)式進行拉氏變換得: 對(4)式整理得: 再次對(5)式進行拉氏反變換整理得: 式(6)中, 為時間常數,反映上升速度的快慢,式(7)中,。設步進電 機在升速過程中啟動頻率為,運行最高頻率為,當運行足夠的時間后(用表示),有 ,根據式(7)得: 由(8)式整理,并且由于遠大于,故: 將(9)式代入(7)式中得: 式(10)中 為時間常數,該式就是普通的指數加減速的數學模型。
2 步進電機的升降速曲線
由步進電機動態特性的理論推導可知,指數規律的升降速曲線更能使步進電機轉子的角加速度 的變化與其輸出轉矩的變化相適應,指數曲線能更充分反應步進電機速度特性。因此用指數曲線來 分析步進電機加減速。由指數曲線方程繪制出電機升降速曲線如下圖1所示: 如圖1所示,縱坐標為頻率,單位是步/秒,其實反映了轉速的高低。橫坐標為時間,各段時間內走 過的步數用N來表示,步數其實反映了行程。圖中標出理想升速曲線和實際升速曲線。
3 升速過程的離散處理
由升速算法,在程序運行時,若運行速度為,則可計算出升速時 間為: 由于計算機上無法實現連續控制,必須將上升時間離散化。若將升速段均勻分為n段,由(11) 式可知上升的時間為,則相鄰兩次速度變化的時間間隔為。 式中:n為階梯的分檔數。則每一檔的頻率為 由上式可計算出定時器的時間設定值,即各頻率段上脈沖個數(或運行的步數)Ni為 則升速的總步數為: 程序執行過程中,對每檔速度都要計算在這個臺階應走的步數,然后以遞減方式檢查。當減至 零時,表示該檔速度應走的步數已走完,轉入下一檔速度,與此同時,還要遞減升速過程總步數,直到升速過程走完為止。以上就是對升速過程的處理,降速過程的處理方法和升速過程相同。 本文所選的步進電機為42BYG4501型兩相混合式步進電機,該電機的最大空載啟動頻率為 1200步/s, 允許突跳頻率可由電機的最大空載啟動頻率求得,一般取其1/2~3.結合本系統對升降速的具體要求。
4 用單片機實現步進電機的速度控制
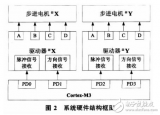
本文采用C8051F040單片機對步進電機進行升降速控制,單片機使用定時器中斷方式來控制步 進電機的速度,升降速控制實際上是不斷改變定時器初載值的大小。為了少占用CPU資源并提高響 應速度,設計時把各離散點速度所需的定時器裝載值固化在單片機的ROM中,系統運行時用查表法 查出所需的裝載值。升速控制中,需要查各臺階微步數和對應的時間常數表。減速控制中,無需任 何調整,等分時間取和加速段相同值。最后一檔速度為加速段的啟動速度。 系統進入加減速運行方式后,首先依據設定的工作速度,計算加減速過程所需的臺階數和定時 器時間常數以及勻速段定時器時間常數并填表。加減速程序流程圖如下圖2所示,也即查表執行加速 各檔,勻速段,減速各檔的過程。 假定將加速和減速段對稱地細化為255段,使之成為鋸齒狀逐步逼近指數的曲線進行加、減速。
5 結語
本文運用指數加、減速方法實現單片機對步進電機的速度控制,利用離散化處理實現了步進電機的速度調節,根據指數規律函數計算各上升和下降階梯時的頻率,通過查表和定時中斷技術實現 步進電機的升降速控制。實驗結果表明,用上文所述的升降速控制流程圖編寫的程序在實際運用中 電機運行平穩,能可靠地沿著所設計的指數型曲線運行,該方法簡單實用且效果好。
-
單片機
+關注
關注
6037文章
44558瀏覽量
635233 -
控制系統
+關注
關注
41文章
6618瀏覽量
110605 -
步進電機
+關注
關注
150文章
3110瀏覽量
147484
發布評論請先 登錄
相關推薦
步進電機的速度控制
步進電機的線速度控制 精選資料推薦
plc如何控制步進電機的速度和方向?
plc如何控制步進電機的速度和方向?






 工商網監
工商網監
評論